mRo Pixhawk Flight Controller (Pixhawk 1)
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
The mRo Pixhawk® is a hardware compatible version of the original Pixhawk 1. It runs PX4 on the NuttX OS.
TIP
The controller can be used as a drop-in replacement for the 3DR® Pixhawk 1. The main difference is that it is based on the Pixhawk-project FMUv3 open hardware design, which corrects a bug that limited the original Pixhawk 1 to 1MB of flash.

Assembly/setup instructions for use with PX4 are provided here: Pixhawk Wiring Quickstart
TIP
This autopilot is supported by the PX4 maintenance and test teams.
Основні характеристики
Мікропроцесор:
- 32-bit STM32F427 Cortex® M4 core з FPU
- 168 MHz/256 KB RAM/2 MB Flash
- 32 bit STM32F103 відмовостійкий копроцесор
- 24 MHz/8 KB RAM/64 KB Flash
Датчики:
- ST Micro L3GD20 3-axis 16-бітний гіроскоп
- ST Micro LSM303D 3-вісний 14-бітний акселерометр / магнітометр
- Invensense® MPU 6000 3-вісний акселерометр/гіроскоп
- MEAS MS5611 барометр
Інтерфейси:
- 5x UART (послідовні порти), один високої потужності, 2x з контролем потоку ГВП
- 2x CAN
- Вхід, сумісний з приймачами Spektrum DSM / DSM2 / DSM-X® Satellite до DX8 (DX9 та вище не підтримуються)
- Futaba® S.BUS сумісний вхід та вихід
- Сигнал суми PPM
- Вхід RSSI (ШІМ або напруга)
- I2C
- SPI
- 3.3 та 6.6V ADC входи
- Зовнішній порт microUSB
Система живлення:
- Ідеальний діодний контролер з автоматичним перемиканням на резервне живлення
- Сервопривід високої потужності (7 В) і готовий до великого струму
- Усі периферійні виводи захищені від перевантаження по струму, усі входи захищені від електростатичного розряду
Вага та розміри:
- Вага: 38г (1,31 унції)
- Ширина: 50 мм (1.96")
- Товщина: 15.5 мм (.613")
- Довжина: 81.5 мм (3.21")
Доступність
- Bare Bones - Just the board (useful as a 3DR Pixhawk replacement)
- mRo Pixhawk 2.4.6 Essential Kit! - Everything except for telemetry radios
- mRo Pixhawk 2.4.6 Cool Kit! (Limited edition) - Everything you need including telemetry radios
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
sh
make px4_fmu-v3_defaultВідладочні порти
Порт Консолі
The PX4 System Console runs on the port labeled SERIAL4/5.
TIP
A convenient way to connect to the console is to use a Zubax BugFace BF1, as it comes with connectors that can be used with several different Pixhawk devices. Simply connect the 6-pos DF13 1:1 cable on the Zubax BugFace BF1 to the Pixhawk SERIAL4/5 port.

The pinout is standard serial pinout, designed to connect to a 3.3V FTDI cable (5V tolerant).
| 3DR Pixhawk 1 | FTDI | ||
|---|---|---|---|
| 1 | +5V (red) | N/C | |
| 2 | S4 Tx | N/C | |
| 3 | S4 Rx | N/C | |
| 4 | S5 Tx | 5 | FTDI RX (yellow) |
| 5 | S5 Rx | 4 | FTDI TX (orange) |
| 6 | GND | 1 | FTDI GND (black) |
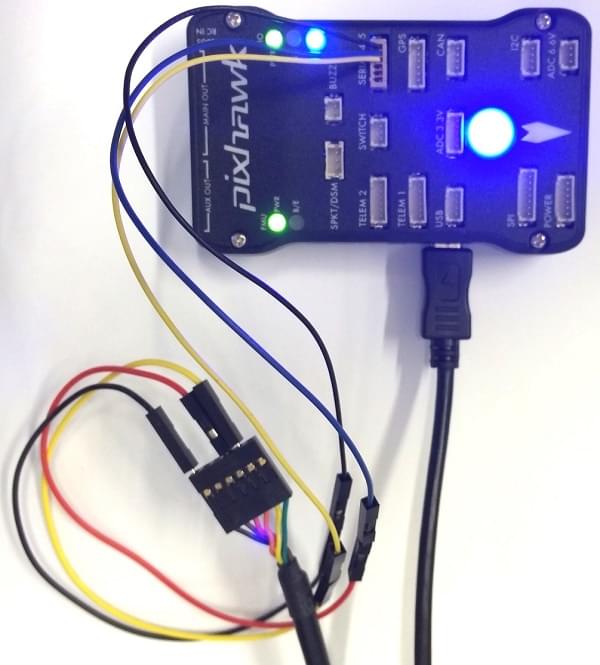
The wiring for an FTDI cable to a 6-pos DF13 1:1 connector is shown in the figure below.

The complete wiring is shown below.
INFO
For information on how to use the console see: System Console.
SWD Port
The SWD (JTAG) ports are hidden under the cover (which must be removed for hardware debugging). There are separate ports for FMU and IO, as highlighted below.
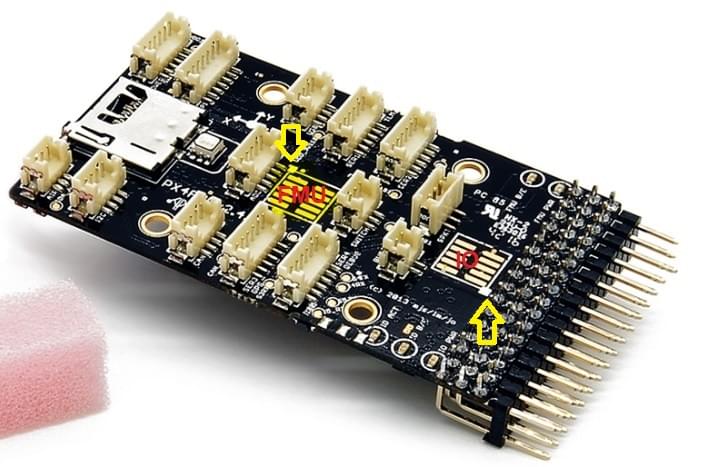
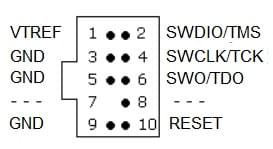
The ports are ARM 10-pin JTAG connectors, which you will probably have to solder. The pinout for the ports is shown below (the square markers in the corners above indicates pin 1).
INFO
All Pixhawk FMUv2 boards have a similar SWD port.
Схема розташування виводів
TELEM1, TELEM2 порти
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CTS (IN) | +3.3V |
| 5 (blk) | RTS (OUT) | +3.3V |
| 6 (blk) | GND | GND |
Порт GPS
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CAN2 TX | +3.3V |
| 5 (blk) | CAN2 RX | +3.3V |
| 6 (blk) | GND | GND |
SERIAL 4/5 port
Due to space constraints two ports are on one connector.
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (#4) | +3.3V |
| 3 (blk) | RX (#4) | +3.3V |
| 4 (blk) | TX (#5) | +3.3V |
| 5 (blk) | RX (#5) | +3.3V |
| 6 (blk) | GND | GND |
ADC 6.6V
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | up to +6.6V |
| 3 (blk) | GND | GND |
ADC 3.3V
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | до +3.3V |
| 3 (blk) | GND | GND |
| 4 (blk) | ADC IN | до +3.3V |
| 5 (blk) | GND | GND |
I2C
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | SCL | +3.3 (pullups) |
| 3 (blk) | SDA | +3.3 (pullups) |
| 4 (blk) | GND | GND |
CAN
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | CAN_H | +12V |
| 3 (blk) | CAN_L | +12V |
| 4 (blk) | GND | GND |
SPI
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | SPI_EXT_SCK | +3.3 |
| 3 (blk) | SPI_EXT_MISO | +3.3 |
| 4 (blk) | SPI_EXT_MOSI | +3.3 |
| 5 (blk) | !SPI_EXT_NSS | +3.3 |
| 6 (blk) | !GPIO_EXT | +3.3 |
| 7 (blk) | GND | GND |
POWER
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | VCC | +5V |
| 3 (blk) | CURRENT | +3.3V |
| 4 (blk) | VOLTAGE | +3.3V |
| 5 (blk) | GND | GND |
| 6 (blk) | GND | GND |
SWITCH
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +3.3V |
| 2 (blk) | !IO_LED_SAFETY | GND |
| 3 (blk) | SAFETY | GND |
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |
Креслення
The board is based on the Pixhawk-project FMUv3 open hardware design.
- FMUv3 schematic -- Schematic and layout
INFO
As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are available.