Holybro Pix32 v5
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
Pix32 v5® is an advanced autopilot flight controller designed and made by Holybro®. Він оптимізований для роботи з прошивкою PX4, яка призначена як для академічних, так і для комерційних розробників. It is based on the Pixhawk-project FMUv5 open hardware design and runs PX4 on the NuttX OS. Це можна вважати варіантом версії Pixhawk4.
Pix32 v5 розроблено для пілотів, які потребують потужності, гнучкої та настроюваної системи керування польотами. Він складається з окремого контролера польоту та базової плати, які з'єднані 100-контактним роз'ємом. Цей дизайн дозволяє користувачам вибирати базову плату від Holybro або налаштовувати свою власну.

INFO
This flight controller is manufacturer supported.
Короткий опис
- Головний FMU процесор: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- IO Processor: STM32F100
- 32 Bit Arm®️ Cortex®️-M3, 24MHz, 8KB SRAM
- Бортові сенсори:
- Акселератор/гіроскоп: ICM-20689
- Accel/Gyro: BMI055 або ICM20602
- Магнітометр: IST8310
- Барометр: MS5611
- GPS: u-blox Neo-M8N GPS/ГЛОНАСС приймач; інтегрований магнетометр IST8310
- Інтерфейси:
- 8-16 PWM виходи (8 із IO, 8 із FMU)
- 3 виділених PWM/Capture входи на FMU
- Виділений R/C вхід для CPPM
- Виділений R/C вхід для Spektrum / DSM та S.Bus з аналоговим / PWM RSSI входом
- Спеціалізований S.BUS вивід сервоприводу
- 5 загальних послідовних портів
- 2 з повним контролем потоку
- 1 з відокремленням 1.5A поточної межі
- 3 I2C порти
- 4 шини SPI
- 1 внутрішня шина датчика високої швидкості SPI з 4 обраними чіпами і 6 DRDY
- 1 внутрішня SPI шина, виділена для
- Барометр з 2-ма чіпами, не DRDY
- 1 внутрішній SPI bus, виділений для FRAM
- Підтримує спеціалізовану SPI калібрування EEPROM, розташовану на модулі сенсорів
- 1 зовнішній bus SPI
- До 2 CANBus для подвійного CAN з послідовним ESC
- Кожен CANBus має окреме керування тихим контролером або ESC RX-MUX
- Аналогові входи для напруги / струму з 2 батарей
- 2 додаткових аналогових входи
- Електрична система:
- Вивід енергомодуля 4.9~5.5 В
- Максимальна вхідна напруга: 6 В
- Максимальний струм у значенні: 120 A
- Вхід USB Power: 4.75~5.25V
- Вхід сервоприводу: 0~36V
- Вага та розміри:
- Розміри: 45x45x13.5мм
- Вага: 33.0гр
- Environmental Data, Quality & Reliability:
- Температура роботи: -40 ~ 85°c
- Температура зберігання: -40 / 85℃
- CE
- FCC
- Сумісний із RoHS (без свинцю)
Additional information can be found in the Pix32 V5 Technical Data Sheet.
Where to Buy
Order from Holybro website.
Зборка/інсталяція
The Pix32 v5 Wiring Quick Start provides instructions on how to assemble required/important peripherals including GPS, Power Management Board etc.
Макети базової плати
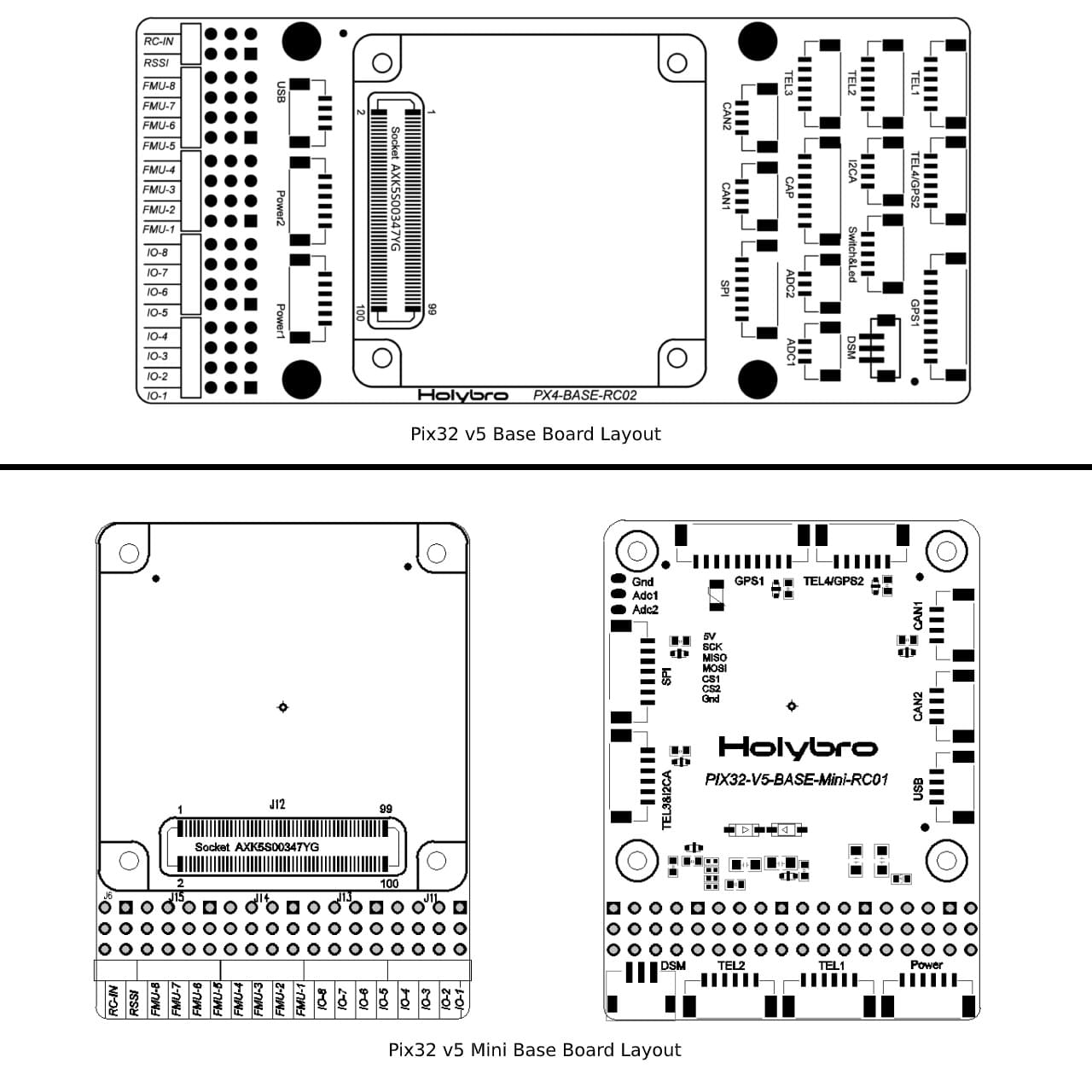
Схема розташування виводів
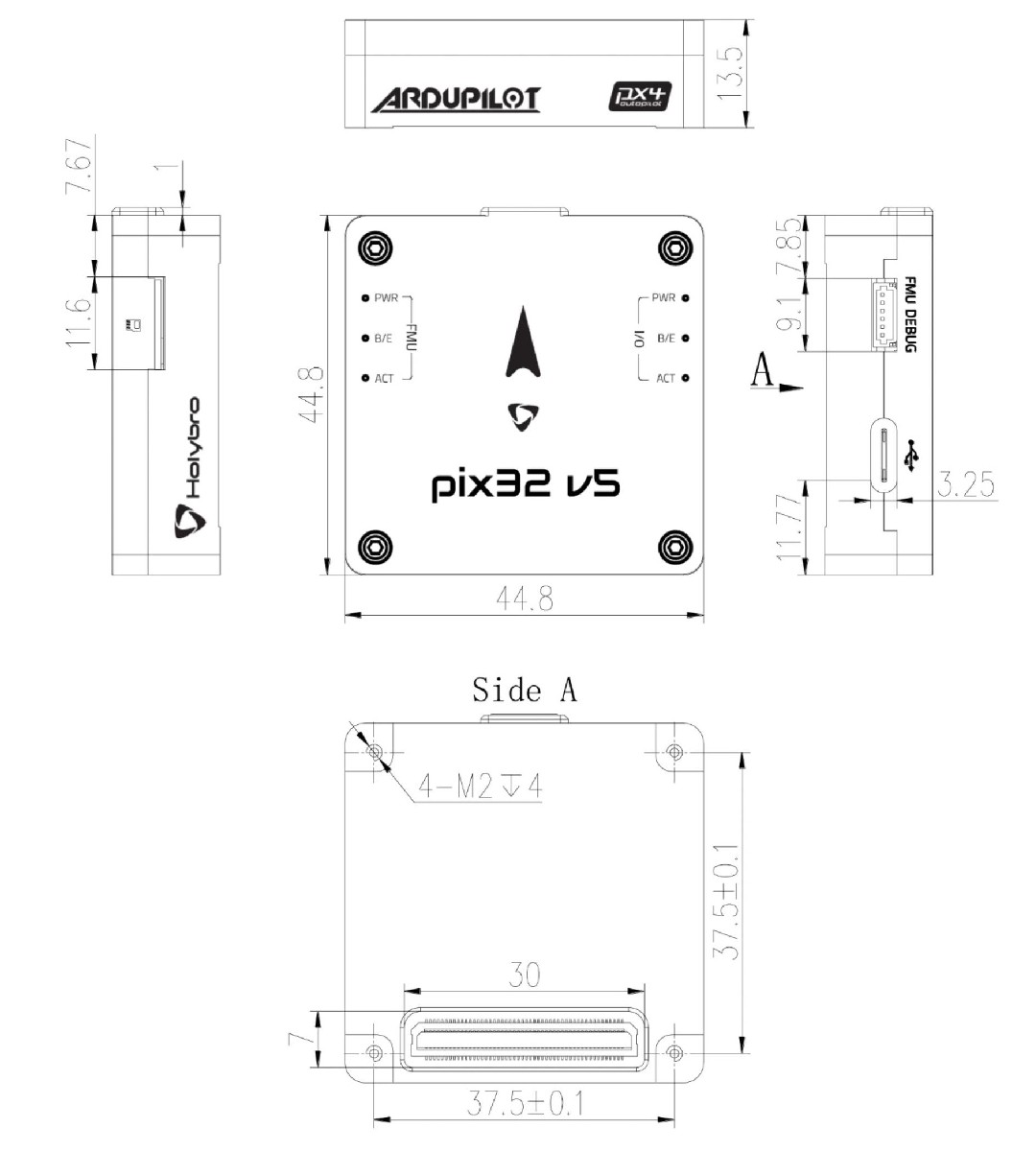
Розміри
Номінальна напруга
Pix32 v5 can be triple-redundant on the power supply if three power sources are supplied. The three power rails are: POWER1, POWER2 and USB.
INFO
The output power rails FMU PWM OUT and I/O PWM OUT (0V to 36V) do not power the flight controller board (and are not powered by it). You must supply power to one of POWER1, POWER2 or USB or the board will be unpowered.
Normal Operation Maximum Ratings
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER1 and POWER2 inputs (4.9V to 5.5V)
- USB input (4.75V to 5.25V)
Absolute Maximum Ratings
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- POWER1 and POWER2 inputs (operational range 4.1V to 5.7V, 0V to 10V undamaged)
- USB input (operational range 4.1V to 5.7V, 0V to 6V undamaged)
- Servo input: VDD_SERVO pin of FMU PWM OUT and I/O PWM OUT (0V to 42V undamaged)
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
зробіть holybro_durandal-v1_defaultВідладочний порт
The system's serial console and SWD interface runs on the FMU Debug port
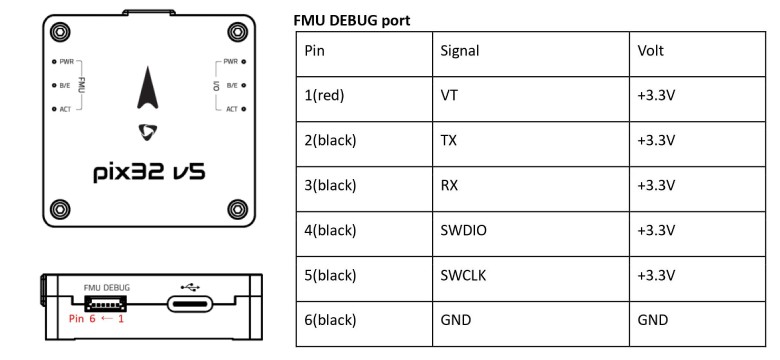
The pinout uses the standard Pixhawk Debug Mini interface defined in the Pixhawk Connector Standard.
Периферійні пристрої
Підтримувані платформи / Конструкції
Будь-який мультикоптер / літак / наземна платформа / човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. The complete set of supported configurations can be seen in the Airframes Reference.