Differential-steering Rovers
main (PX4 v1.16+) ExperimentalWARNING
Support for rover is experimental. Maintainer volunteers, contribution of new features, new frame configurations, or other improvements would all be very welcome!
A differential-steering rover's motion is controlled using a differential drive mechanism, where the left and right wheel speeds are adjusted independently to achieve the desired forward speed and yaw rate.
Forward motion is achieved by driving both wheels at the same speed in the same direction. Rotation is achieved by driving the wheels at different speeds in opposite directions, allowing the rover to turn on the spot.
Basic Setup
To start using the differential-steering rover:
Enable the module by flashing the PX4 rover build onto your flight controller.
In the Airframe configuration select the Generic Rover Differential:
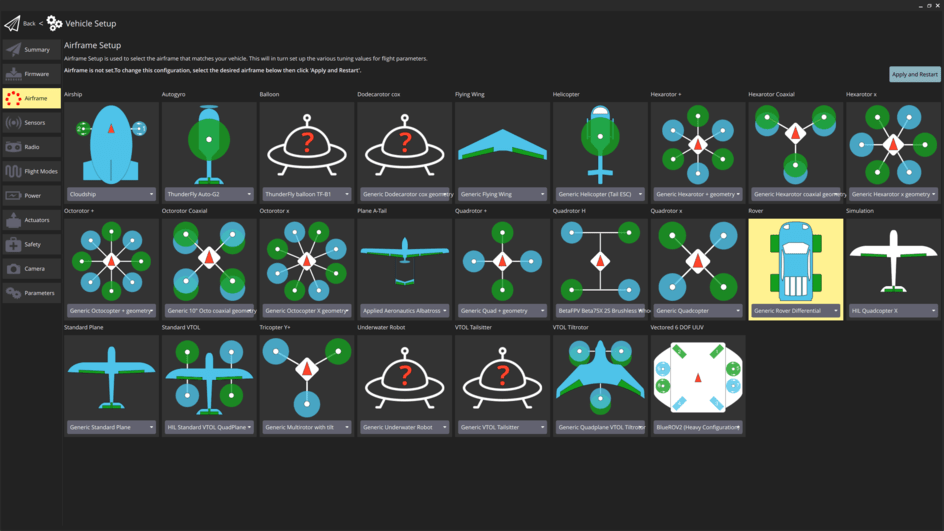
Select the Apply and Restart button.
INFO
If this airframe does not show up in the UI, it can alternatively be selected by setting the SYS_AUTOSTART parameter to
50000.Open the Actuators Configuration & Testing to map the motor functions to flight controller outputs.
This is sufficient to drive the the rover in manual mode (see Flight modes).
INFO
The parameter RD_MAN_YAW_SCALE can be used to scale the manual input for the yaw rate.
Tuning (Basic)
This section goes through the basic parameters that need to be set to use all other features for the differential-steering rover. Navigate to Parameters in QGroundControl and set the following parameters:
RD_WHEEL_TRACK [m]: Measure the distance from the center of the right wheel to the center of the left wheel.

RD_MAX_SPEED [m/s]: In manual mode, drive the rover with full throttle and enter the observed speed as the parameter.
RD_MAX_YAW_RATE [deg/s]: This is the maximum yaw rate you want to allow for your rover. This will define the stick-to-yaw-rate mapping in acro mode as well as setting an upper limit for the yaw rate in mission mode.
RD_YAW_RATE_P and RD_YAW_RATE_I [-]: Tuning parameters for the closed-loop yaw rate controller.
INFO
This can be tuned by setting all previous parameters and then setting the rover to Acro mode. Use the right stick to yaw the rover on the spot and then observe the desired and actual yaw rate in the flight log. Change parameters and iterate.
Suggestion: Start the tuning process with RD_YAW_RATE_I equal to zero and only set if necessary.
This is enough to start using the rover in Acro mode. To start driving mission the parameters in Tuning (Mission) also must be set.
Tuning (Mission)
WARNING
The parameters in Tuning (Basic) must also be set to drive missions!
The module uses a control algorithm called pure pursuit, see Mission Mode for the basic tuning process. The additional parameters are separated into the following sections:
Mission Velocity
These parameters tune velocity control in missions:
- RD_MISS_SPD_DEF: Sets the default velocity (
) for the rover during the mission. - RD_MAX_ACCEL (
) and RD_MAX_JERK ( ) are used to calculate a velocity trajectory such that the rover comes to a smooth stop as it reaches a waypoint. - RD_SPEED_P and RD_SPEED_I are used to tune the closed-loop velocity controller during missions.
Yaw Rate
The yaw rate setpoint is calculated using the heading error in a PID controller when the pure pursuit algorithm. This can be tuned with RD_YAW_P and RD_YAW_I.
INFO
There is some degree of overlap between this tuning and the pure pursuit controller gain set in Mission Mode as they both have an influence on how aggressive the rover will steer.
State Machine
The module employs the following state machine to make full use of a differential-steering rovers ability to turn on the spot: 
These transition thresholds can be set with RD_TRANS_DRV_TRN and RD_TRANS_TRN_DRV.
Parameters
The following parameters affect the differential-steering rover in mission mode (overview):
| Parameter | Description | Unit |
|---|---|---|
| RD_MISS_SPD_DEF | Mission speed for the rover | |
| RD_MAX_ACCEL | Maximum acceleration for the rover | |
| RD_MAX_JERK | Maximum jerk for the rover | |
| RD_SPEED_P | Proportional gain for closed loop forward speed controller | - |
| RD_SPEED_I | Integral gain for closed loop forward speed controller | - |
| RD_YAW_P | Proportional gain for closed loop yaw controller | - |
| RD_YAW_I | Integral gain for closed loop yaw controller | - |
| RD_TRANS_DRV_TRN | Heading error threshold to switch from driving to spot turning | deg |
| RD_TRANS_TRN_DRV | Heading error threshold to switch from spot turning to driving | deg |