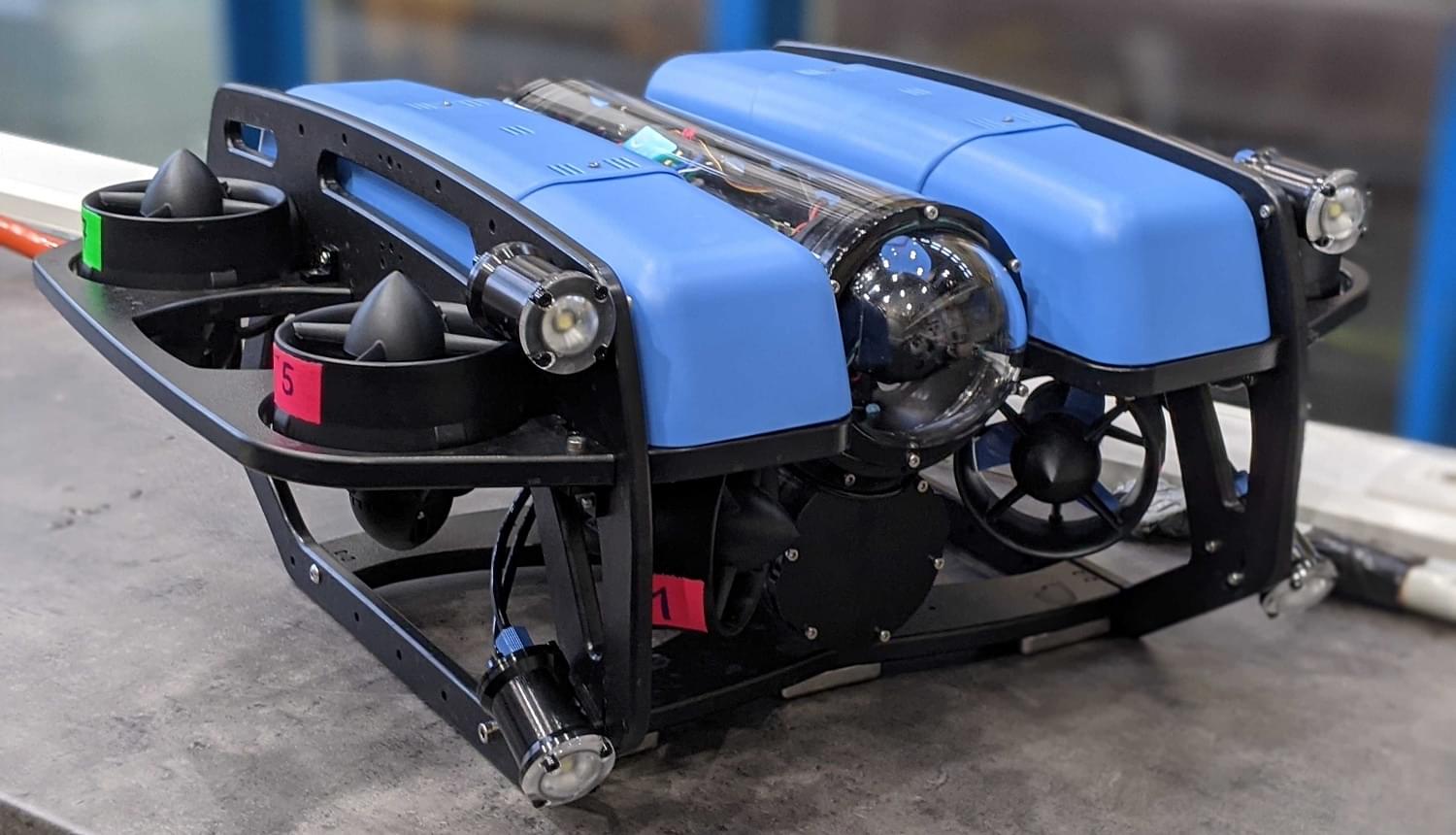
BlueROV2 (UUV)
PX4 v1.12The BlueROV2 is an affordable high-performance underwater vehicle that is perfect for inspections, research, and adventuring.
PX4 provides experimental support for an 8-thrust vectored configuration, known as the BlueROV2 Heavy Configuration.
Where to Buy
BlueROV2 + BlueROV2 Heavy Configuration Retrofit Kit
Motor Mapping/Wiring
The motors must be wired to the flight controller following the standard instructions supplied by BlueRobotics for this vehicle .
The vehicle will then match the configuration documented in the Airframe Reference:

- MAIN1: motor 1 CCW, bow starboard horizontal, , propeller CCW
- MAIN2: motor 2 CCW, bow port horizontal, propeller CCW
- MAIN3: motor 3 CCW, stern starboard horizontal, propeller CW
- MAIN4: motor 4 CCW, stern port horizontal, propeller CW
- MAIN5: motor 5 CCW, bow starboard vertical, propeller CCW
- MAIN6: motor 6 CCW, bow port vertical, propeller CW
- MAIN7: motor 7 CCW, stern starboard vertical, propeller CW
- MAIN8: motor 8 CCW, stern port vertical, propeller CCW
Basic Control Axes
For underwater vehicles, motion is defined in terms of body axes:
- Surge: forward/back motion - translation along the body X axis.
- Sway: left/right motion - translation along the body Y axis.
- Heave: up/down motion - translation along the body Z axis.
- Yaw: rotation about the (vertical) body Z axis.
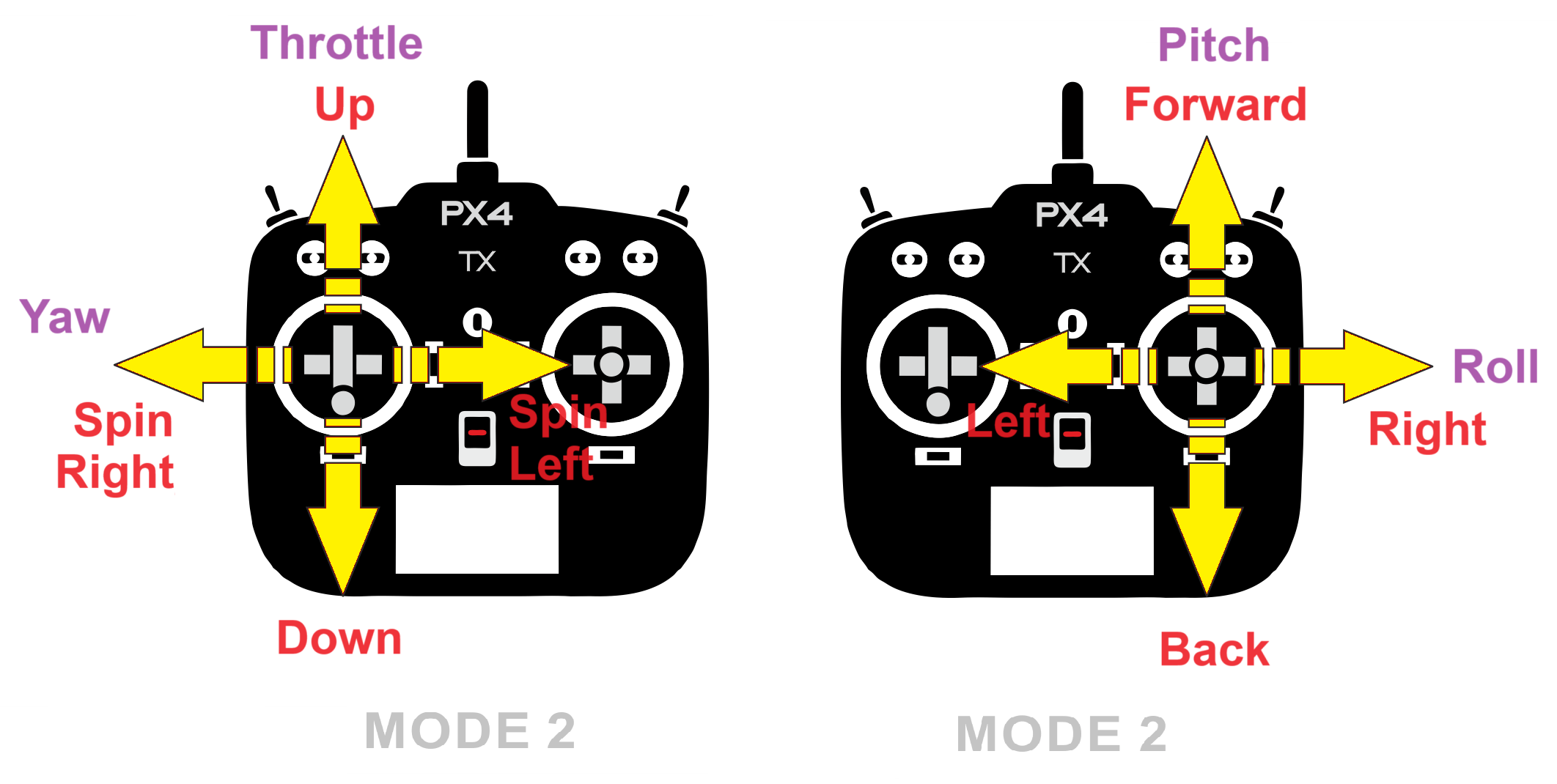
Stick Mapping (Mode 2)
The mapping below illustrates the default joystick behavior:
- Pitch stick (forward/back): surge
- Roll stick (left/right): sway
- Throttle stick (up/down): heave
- Yaw stick (left/right): yaw
Manual Modes
The following manual and assisted modes are currently supported on BlueROV2 Heavy:
| Mode | Description |
|---|---|
| Manual | Direct manual control of thrust and yaw. |
| Stabilized | Manual control of thurst and yaw with roll/pitch stabilization. |
| Acro | Manual control of yaw-rate and direct thrust commands with roll/pitch stabilization. |
| Altitude | Manual control of x/y thrust and yaw. Control of height with PID, manually controlled by user. Keeps roll/pitch stabilized. |
| Position | Controls x, y, z and yaw with position hold when sticks are released. Keeps roll/pitch stabilized. |
Joystick Stick Mode
BlueROV2 supports two joystick mappings for manual control, selected using the UUV_STICK_MODE parameter.
By default, UUV_STICK_MODE is set to 0, which enables the UUV stick mapping intended for vectored underwater vehicles.
UUV_STICK_MODE = 0 (default)
This mode is intended for normal BlueROV2 operation. In Manual, Stabilized, and Acro modes, the sticks command:
- Pitch stick: surge - moving stick up -> moving forward, +X translation in body frame.
- Roll stick: sway - moving stick right -> moving sideways right, +Y translation in body frame.
- Throttle stick: heave - moving stick up -> moving upwards, -Z translation in body frame (note the Z axis points Down of the vehicle in PX4).
- Yaw stick: yaw - moving stick right -> yawing to the right, +Z rotation in body frame.
In this mode, roll and pitch are kept level rather than commanded directly.
UUV_STICK_MODE = 1
This mode enables the legacy multicopter-style stick mapping for Manual, Stabilized, and Acro modes:
- Throttle stick: surge - moving stick up -> moving forward, +X translation in body frame.
- Roll stick: roll - moving stick right -> rolling to the right side, +X rotation in body frame.
- Pitch stick: pitch - moving stick up -> pitching down, -X translation in body frame (note signs are switched to follow PX4 standard).
- Yaw stick: yaw - moving stick right -> yawing to the right, +Z rotation in body frame.
This mode is mainly provided for compatibility with older setups and user preference.
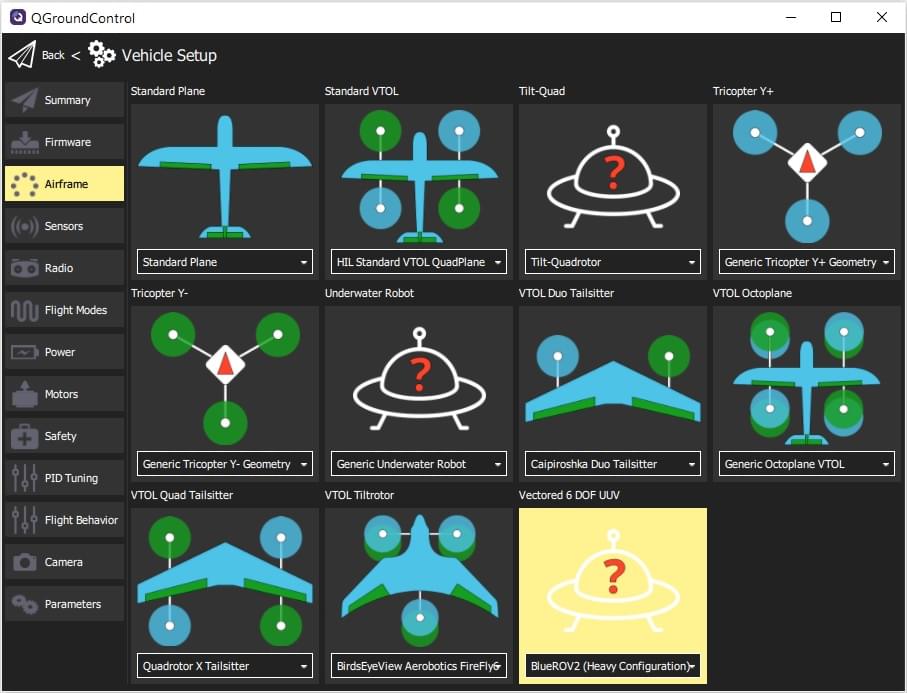
Airframe Configuration
BlueROV2 does not come with PX4 installed. You will need to:
- Install PX4 Firmware
- Set the Airframe. You will need to select the "BlueROV2 Heavy Configuration" as shown: