Remote ID (Open Drone ID)
PX4 v1.14ExperimentalExperimental
Remote ID support is experimental.
Remote ID is a government mandated technology for UAVs in Japan, the United States of America and the European Union, designed to enable safe sharing of airspace between UAVs and other aircraft. The specification requires that UAVs broadcast data such as: real-time location/altitude, serial number, operator ID/location, status, etc.
PX4 works with Remote ID modules that target the FAA standard Remote ID rules. These are designed to be integrated into the vehicle, and broadcast Open Drone ID messages (Open Drone ID is an open source implementation of Remote ID) using id, position, and other information that is supplied by an autopilot. The "standard rules" modules enable less restrictive operation than "broadcast rules" modules, which are standalone modules with an integrated GPS that do not have any communication with the autopilot.
Supported Hardware
WARNING
Remote ID hardware can only be connected via DroneCAN on main branch builds (builds after PX4 v1.15).
PX4 integrates with Remote ID hardware that supports:
- Open Drone ID MAVLink protocolPX4 v1.14
- Remote ID over CANPX4 main (v1.16)
It has been tested with the following devices:
- Cube ID (CubePilot)
- Db201 (BlueMark) - Tested via serial port. Not tested via CAN port.
- Db202mav (BlueMark) - Less expensive variant without CAN port.
- Holybro RemoteID Module (Holybro)
Other devices that support the Open Drone ID protocol and DroneCAN should also work (but have not been tested).
Hardware Setup
Remote ID devices can be connected to any free/unused serial port on the flight controller, or CAN. Most commonly they are connected directly to the TELEM2 port (if it is not being use for some other purpose) as this is already configured for MAVLink "by default".
Cube ID
Cube ID can be connected using a serial or CAN port.
It comes with 6-pin and 4-pin JST-GH 1.25mm cables that can be connected directly to the TELEM serial port and CAN ports, respectively, on most recent Pixhawk flight controllers.
Cube ID Serial Port
If using a different port, or a flight controller that has different connector, you may need to modify the cable. The pinout of the serial port is shown below. The TX and RX on the flight controller must be connected to the RX and TX on the Remote ID, respectively.
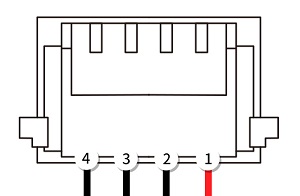
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC_5V | 5V |
| 2 (blk) | TX (OUT) | |
| 3 (blk) | RX (IN) | |
| 4 (blk) | GND | 0 |
Cube ID CAN Port
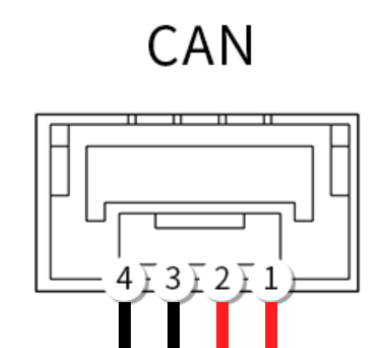
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC_5V | 5V |
| 2 (red) | CAN_H | |
| 3 (blk) | CAN_L | |
| 4 (blk) | GND | 0 |
Cube ID Firmware
The Cube ID uses proprietary firmware (not ArduRemoteID like some other remote id beacons).
For firmware update instructions see Cube ID > Updating.
BlueMark Db201/Db202mav
Db201 or Db202mav can be connected using their serial port.
INFO
The Db201 also has a CAN port that should work on PX4 main builds. However this has not yet been tested.
They come with a 6-pin JST-GH 1.25mm cable that can be connected directly to the TELEM ports on most recent Pixhawk flight controllers.
If using a different serial port (i.e. with fewer pins), or a flight controller that has different connector, you may need to modify the cable. Information on the port pinout can be found in the User Guide.
The beacons come preinstalled with recent ArduRemoteID firmware. The User Guide explains how you can update firmware via the web interface, if needed.
More general setup, including how to mount the beacon, is also covered in the User Guide.
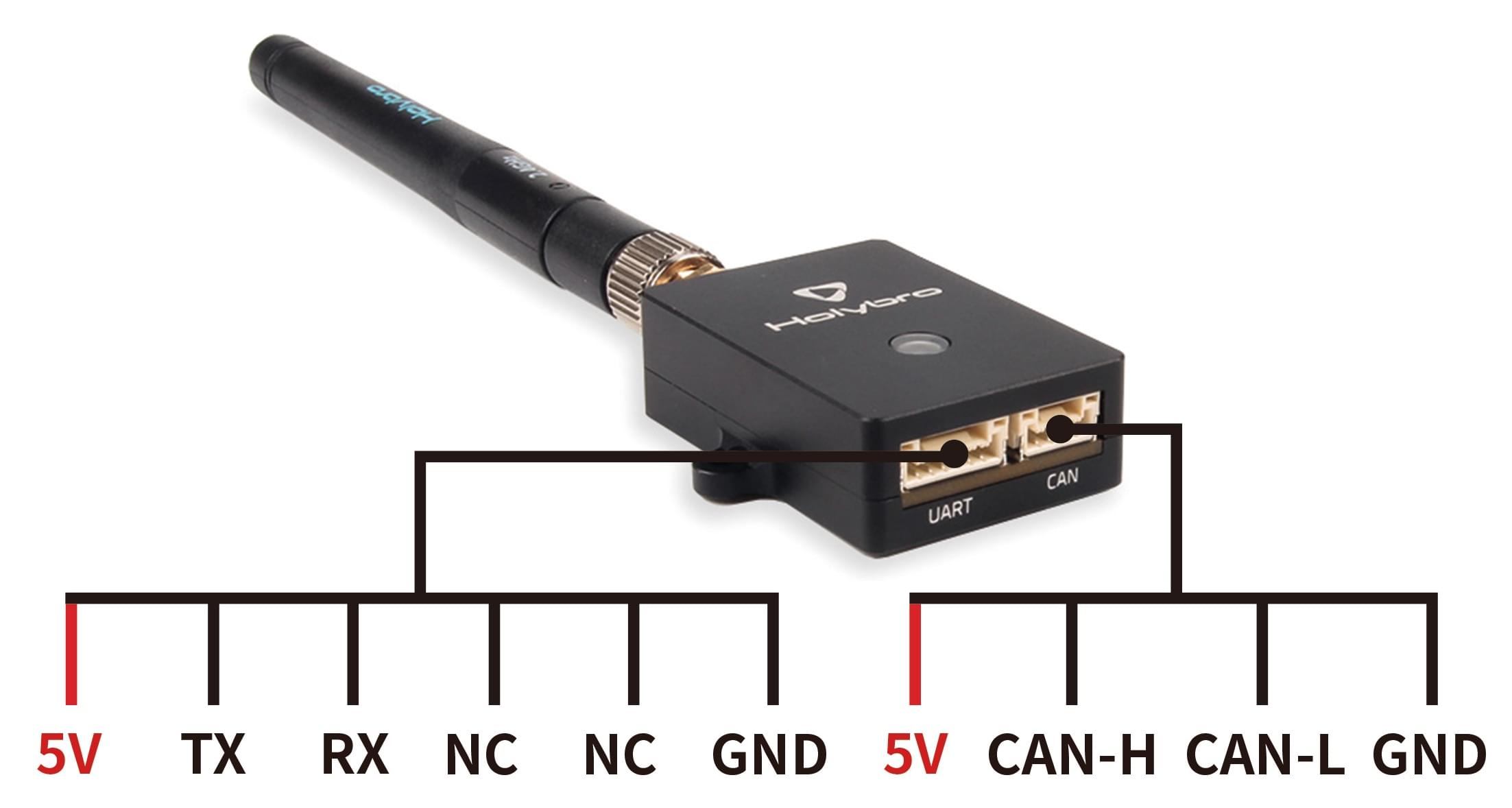
Holybro Remote ID Module
The Holybro Remote ID Module can be connected using a serial or CAN port.
It comes with a 6-pin JST-GH 1.25mm cable that can be connected directly to the TELEM ports on most recent Pixhawk flight controllers such as the Pixhawk 6C/6X or Cube Orange.
The module comes preinstalled with recent ArduRemoteID firmware.
The User Guide explains how you can config and update firmware via the web interface, if needed.
Holybro Pinouts
PX4 Configuration
MAVLink Port Configuration
Remote ID hardware connected to a serial port is configured in the same way as any other MAVLink Peripheral.
Assuming you have connected the device to the TELEM2 port, set the parameters as shown:
- MAV_1_CONFIG =
TELEM 2 - MAV_1_MODE = Normal
- MAV_1_RATE = 0 (default sending rate for port).
- MAV_1_FORWARD = Enabled
Then reboot the vehicle.
You will now find a new parameter called SER_TEL2_BAUD. The required baud rate depends on the remote ID used (for Cube ID it must be set to 57600).
DroneCAN Configuration
Remote ID hardware connected to a CAN is configured in the same way as any other DroneCAN Hardware.
Specifically, you will have to enable DroneCAN by setting the value of UAVCAN_ENABLE to a non-zero value.
TIP
The CAN Remote ID Not Working explains how you can test the setup, and adjust Remote ID settings if necessary.
Enable Remote ID
There is no need to explicitly enable Remote ID (supported Remote ID messages are either streamed by default or must be requested in the current implementation, even if no remote ID is connected).
Remote ID Failsafe and Arming Check
PX4 v1.18The COM_ARM_ODID parameter configures both the arming check and the in-flight failsafe action when the Remote ID system is missing or unhealthy. For more information see Remote ID Failsafe in Safety Configuration.
Module Broadcast Testing
Integrators should test than the remote ID module is broadcasting the correct information, such as UAV location, ID, operator ID and so on. This is most easily done using a 3rd party application on your mobile device:
- Drone Scanner (Google Play or Apple App store)
- OpenDroneID OSM (Google Play)
Implementation
PX4 v1.14 streams these messages by default (in streaming modes: normal, onboard, usb, onboard low bandwidth):
- OPEN_DRONE_ID_LOCATION (1 Hz) - UAV location, altitude, direction, and speed.
- OPEN_DRONE_ID_SYSTEM (1 Hz) Operator location/altitude, multiple aircraft information (group/swarm, if applicable), full timestamp and possible category/class information.
- Implementation assumes operator is located at vehicle home position (does not yet support getting operator position from GCS). This is believed to be compliant for broadcast-only Remote IDs.
The following message can be streamed on request (using MAV_CMD_SET_MESSAGE_INTERVAL):
- OPEN_DRONE_ID_BASIC_ID - UAV identity information (essentially a serial number)
- PX4 v1.14 specifies a serial number (MAV_ODID_ID_TYPE_SERIAL_NUMBER) but does not use the required format (ANSI/CTA-2063 format).
PX4 can prevent arming and/or trigger an in-flight failsafe based on Remote ID health via the COM_ARM_ODID parameter. The UAV will then require HEARTBEAT messages from the Remote ID as a precondition for arming the UAV. You can also set the parameter to 1 to warn but still allow arming when Remote ID HEARTBEAT messages are not detected.
The following Open Drone ID MAVLink messages are not supported in PX4 v1.14 (to be added by PX4#21647):
- OPEN_DRONE_ID_AUTHENTICATION - Provides authentication data for the UAV.
- OPEN_DRONE_ID_SELF_ID - Operator identity (plain text).
- OPEN_DRONE_ID_OPERATOR_ID - Operator identity.
- OPEN_DRONE_ID_ARM_STATUS - Status of Remote ID hardware. Use as condition for vehicle arming, and for Remote ID health check.
- OPEN_DRONE_ID_SYSTEM_UPDATE - Subset of
OPEN_DRONE_ID_SYSTEMthat can be sent with information at higher rate.
Compliance
PX4 may not be compliant with the relevant specifications in version 1.14 (which is why this feature is currently experimental). A working group has been established to evaluate the gaps.
Some known issues are:
- Vehicles must arm conditional on receiving the Remote ID OPEN_DRONE_ID_ARM_STATUS message, with a status that indicates the Remote ID hardware is ready to broadcast.
- PX4 v1.14 does not process
OPEN_DRONE_ID_ARM_STATUS, and arming is only conditional on the Remote ID deviceHEARTBEAT.
- PX4 v1.14 does not process
- Health of the Remote ID depends on both receiving a
HEARTBEATand theOPEN_DRONE_ID_ARM_STATUS. When flying, a non-armed status for the Remote ID must be published in OPEN_DRONE_ID_LOCATION.status as a Remote ID malfunction.- PX4 v1.14 does not yet receive
OPEN_DRONE_ID_ARM_STATUS.
- PX4 v1.14 does not yet receive
OPEN_DRONE_ID_ARM_STATUSmust be forwarded to the GCS, if present for additional error reporting.- OPEN_DRONE_ID_BASIC_ID specifies a serial number in an invalid format (not ANSI/CTA-2063 format).
- The vehicle ID is expected to be tamper resistant.
PX4-Autopilot/21647 is intended to address the known issues.
Troubleshooting
CAN Remote ID Not Working
INFO
This information was tested with the CAN Cube ID from CubePilot. It should also apply to CAN Remote ID modules from other vendors.
To confirm that the Remote ID is working:
Check that the
OPEN_DRONE_ID_BASIC_IDandOPEN_DRONE_ID_LOCATIONmessages appear in the QGroundControl MAVLink Inspector (QGC Analyze Tools > MAVLink Inspector).If those messages are not present, check that the Remote_ID node appears on the UAVCAN list.
Run the following command in the QGroundControl MAVLink Console:
shuavcan statusThe connected CAN nodes should appear in the list. If you only have one CAN component on your system (the remote ID) the list might look like this:
plainOnline nodes (Node ID, Health, Mode): 125 OK OPERATThe nodes aren't "named" so if you have more than one CAN node you can compare the number of nodes shown with the number expected on your system to see if they match. Alternatively you can run the
uavcan statuswith the Remote ID connected and disconnected and difference the result (which has the benefit that you will then known the Remote ID module's node ID).
If the Remote ID CAN node is present and the messages are not being received, then the Remote ID itself may need to be configured:
Open QGroundControl
Navigate to the Application settings: Application Settings > General > Miscellaneous.
Select
Enable Remote ID. The Remote ID tab should appear.INFO
If this option is not present you may be in a very recent version of QGC. In that case, open the view at: Application Settings > Remote ID.
Enter the information for Basic, Operator, and Self ID.
Once configured, check the MAVLink Inspector again and check that the OPEN_DRONE_ID_BASIC_ID and OPEN_DRONE_ID_LOCATION messages are now present.