Aion Robotics R1 UGV
PX4 v1.15Транспортний засіб Aion R1 був обраний для тестування та покращення підтримки диференційного приводу для PX4, а також для покращення підтримки водія для контролерів двигуна Roboclaw, таких як RoboClaw 2x15A.
Документація та інформація про драйвери тут також повинна полегшити роботу з контролерами Roboclaw на інших транспортних засобах, а також з транспортними засобами, такими як Aion R6.
На даний момент PX4 підтримує режим MANUAL для цієї настройки.
Список деталей
Збірка
Збірка складається з рами, виготовленої за допомогою 3D-друку, на яку були закріплені всі частини автопілота. Для цієї збірки це включає Auterion Skynode, підключений до плати адаптера Pixhawk, яка взаємодіє з контролерами руху RoboClaw через послідовний порт.
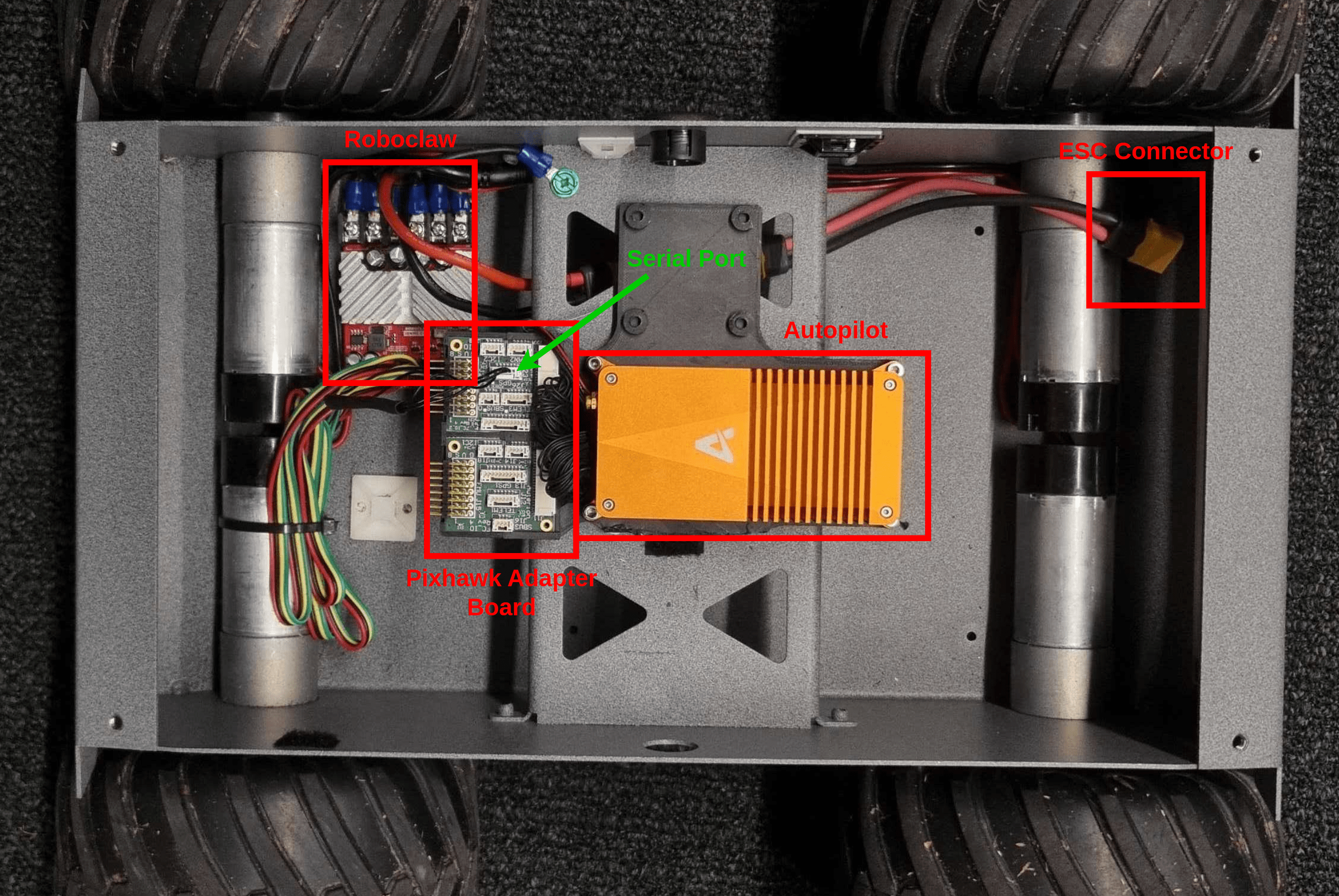
INFO
Якщо використовуєте стандартний Pixhawk, ви можете підключити RoboClaw до автопілота без плати адаптера.
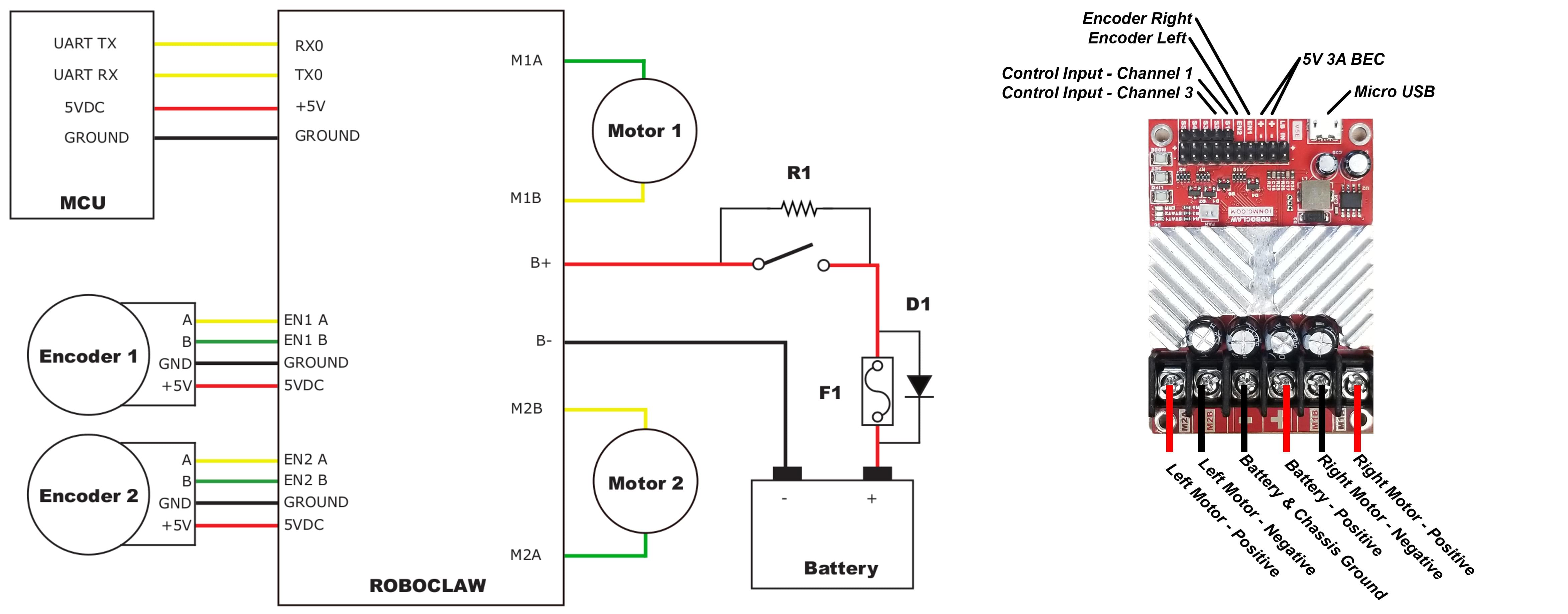
RoboClaw повинен бути підключений до відповідного послідовного (UART) порту на контролері польоту, такого як GPS2 або TELEM1. Інші з'єднання RoboClaw детально описані в розділі Посібник користувача RoboClaw "Проводка пакетної послідовної передачі даних" та показані нижче (ця настройка була перевірена на сумісність).
Налаштування PX4
Конфігурація Rover
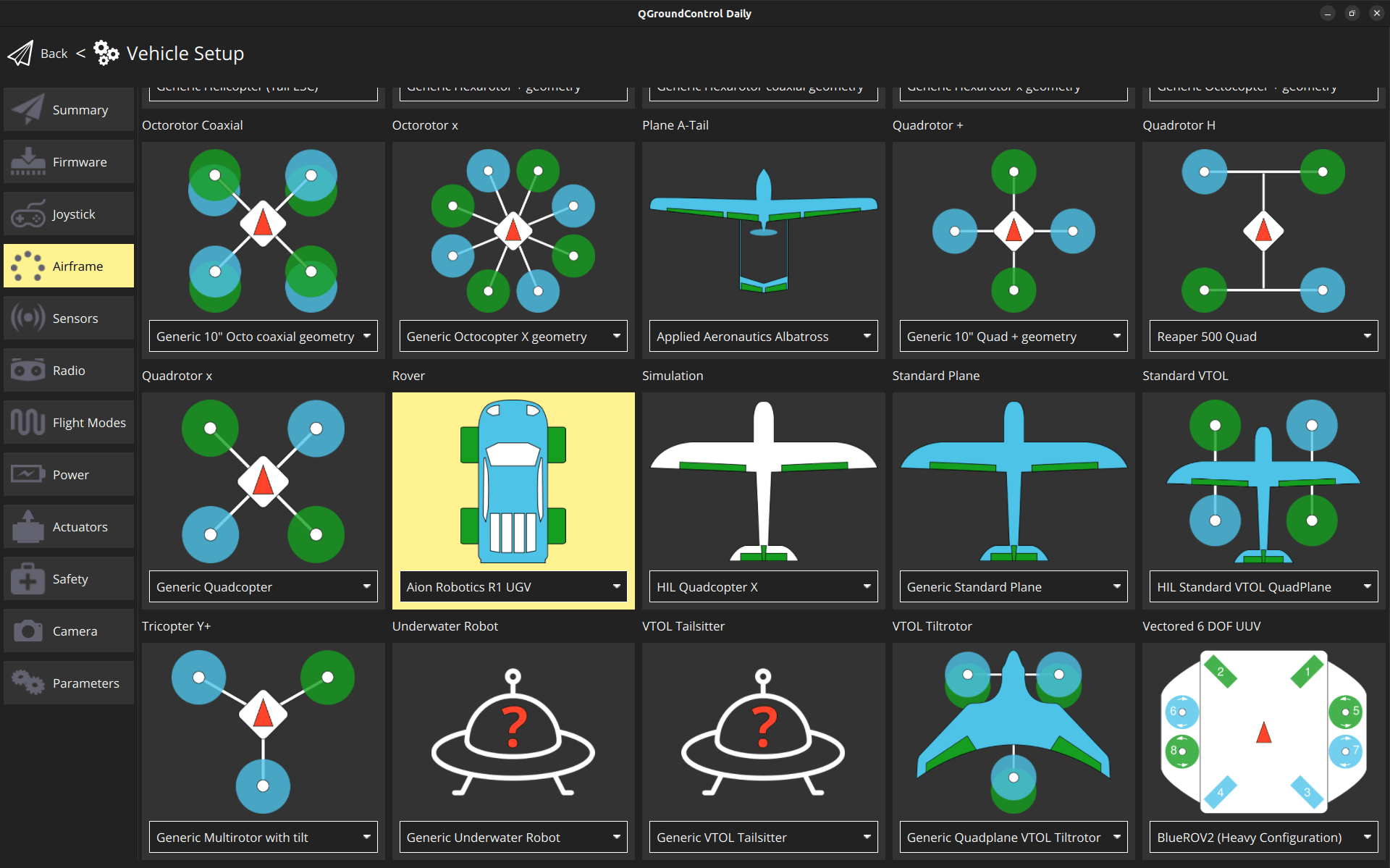
Використовуйте QGroundControl для налаштування рухомого об'єкту:
- У розділі Основні налаштування виберіть вкладку Каркас.
- Оберіть Aion Robotics R1 UGV у категорії Rover.
Конфігурація RoboClaw
Спочатку налаштуйте послідовне з'єднання:
Перейдіть до розділу Параметри в QGroundControl.
Встановіть параметр RBCLW_SER_CFG на послідовний порт, до якого підключений RoboClaw (наприклад,
GPS2).RBCLW_COUNTS_REV визначає кількість лічильників енкодера, необхідних для одного оберту колеса. Це значення повинно бути залишено на
1200для протестованогоКонтролера руху RoboClaw 2x15A. Відрегулюйте значення на основі вашого конкретного енкодера та налаштувань колеса.Контролери моторів RoboClaw повинні мати унікальну адресу на шині. Стандартна адреса - 128, і вам не потрібно її змінювати (якщо ви це робите, оновіть параметр PX4 RBCLW_ADDRESS відповідно).
INFO
PX4 не підтримує кілька контролерів моторів RoboClaw у тому ж транспортному засобі — кожен контролер повинен мати унікальну адресу на шині, і є лише один параметр для встановлення адреси в PX4 (
RBCLW_ADDRESS).
:::
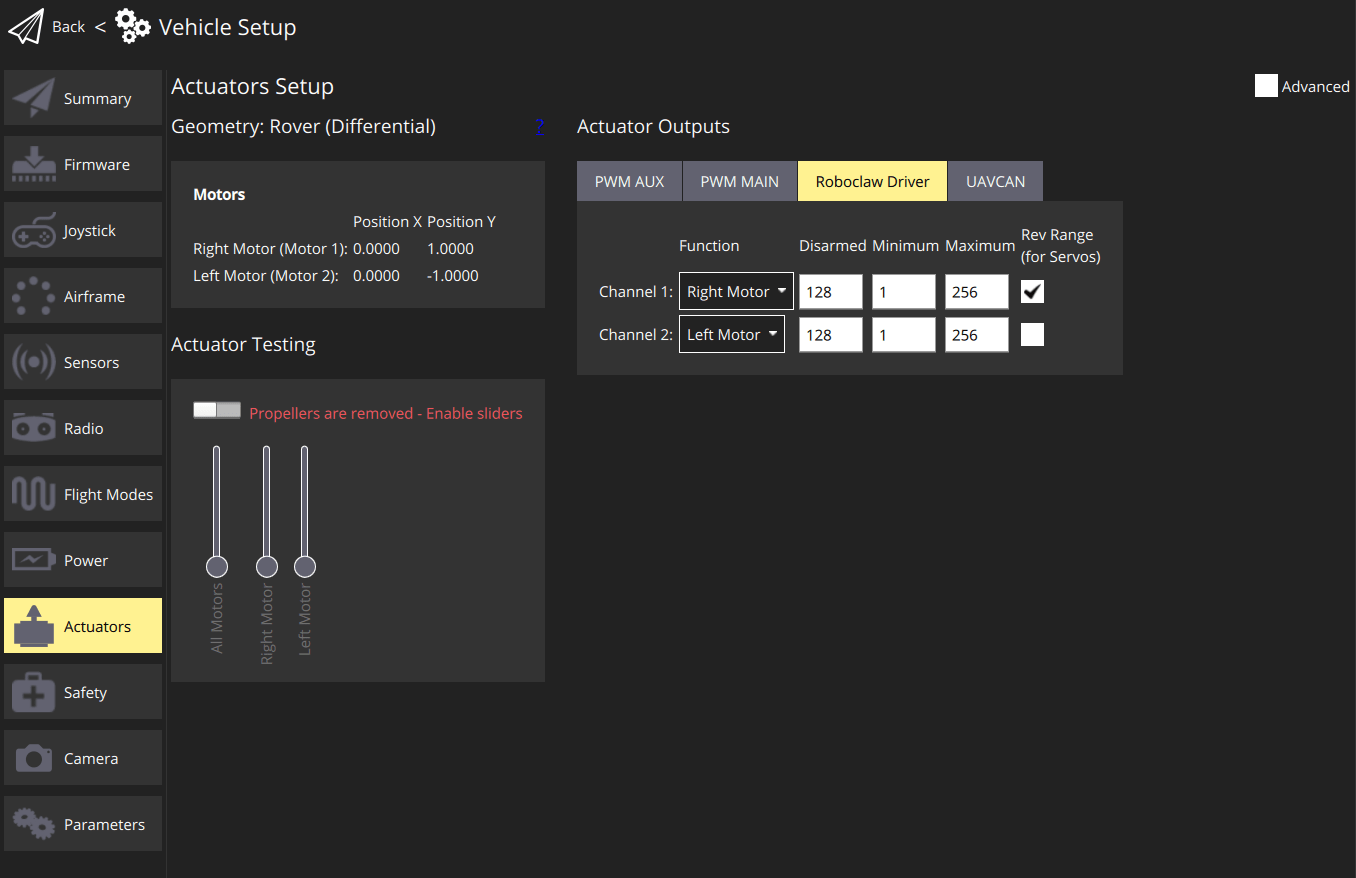
Потім налаштуйте конфігурацію приводу:
Перейдіть до Конфігурації та тестування приводів в QGroundControl.
Виберіть драйвер RoboClaw зі списку Виводів приводів.
Для призначень каналу, роззброю, мінімальних та максимальних значень, будь ласка, звертайтеся до зображення нижче.
Для систем з більш ніж двома двигунами можливо призначити одну й ту ж функцію кільком двигунам. Причина нестандартних значень можна знайти в Користувацькому посібнику RoboClaw під
Командами сумісностідляПакетної послідовної передачі даних:plainПриводити двигун вперед. Діапазон дійсних даних - від 0 до 127. Значення 127 = повна швидкість вперед, 64 = приблизно напівшвидкість вперед і 0 = повна зупинка.