MicoAir743-Lite
PX4 v1.17WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
MicoAir743-Lite is an ultra-high performance H743 flight controller with an unbeatable price, featuring the ICM45686 IMU sensor and integrated Bluetooth telemetry.
Equipped with a high-performance H7 processor, the MicoAir743-Lite features a compact form factor with SH1.0 connectors (which are more suitable than Pixhawk-standard GH1.25 for this board size). When paired with Bluetooth telemetry, the board can be debugged with a phone or PC.
INFO
This flight controller is manufacturer supported.
MicoAir743-Lite (v1.1)
Quick Summary
Processors & Sensors
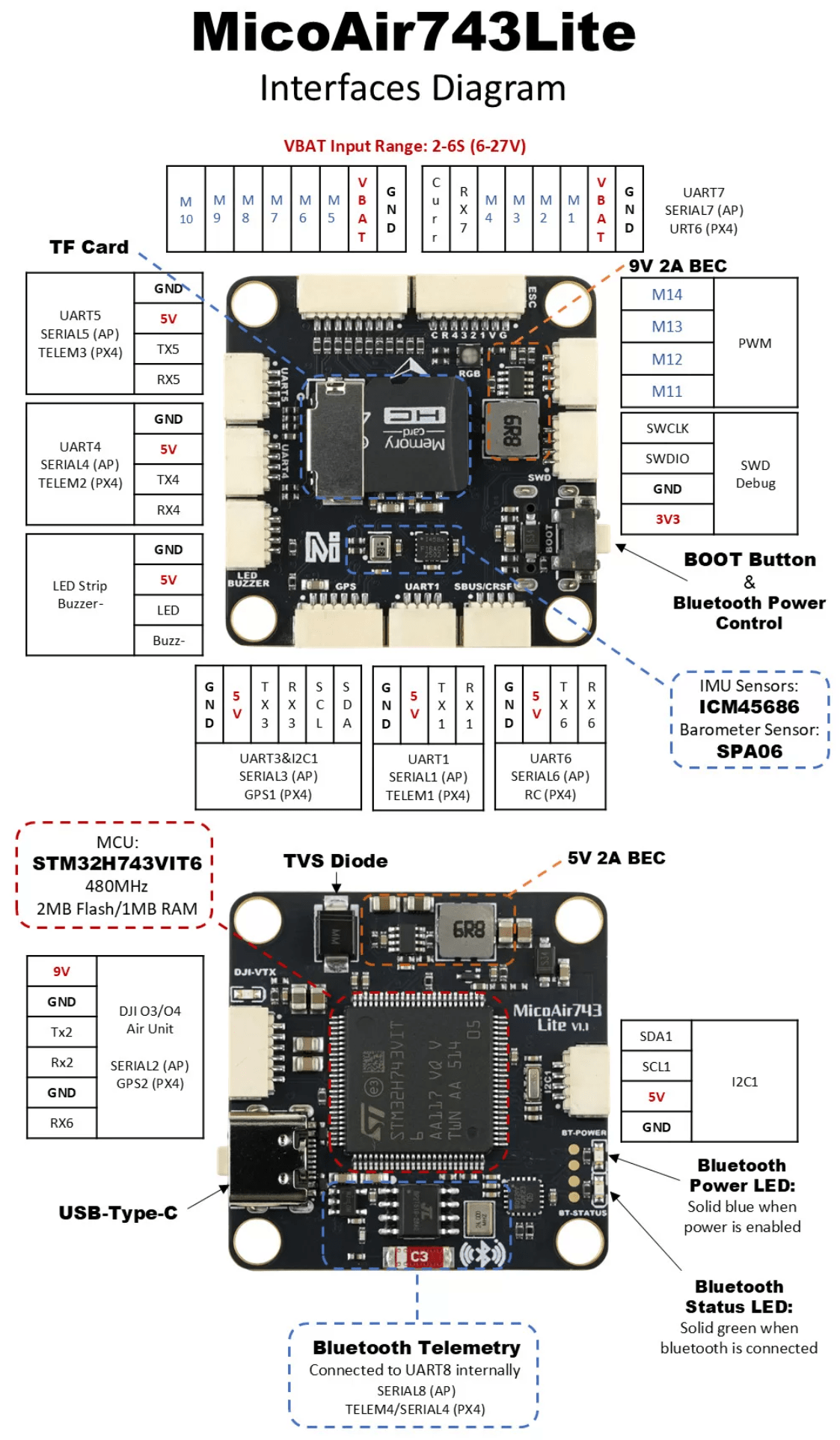
- FMU Processor: STM32H743
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
- On-board sensors
- Accel/Gyro: ICM-45686 (with BalancedGyro™ Technology)
- Barometer: SPA06
- On-board Bluetooth Telemetry
- Connected to UART8 internally, baudrate 115200
- Connecting to QGC (PC or Android phone) via Bluetooth
- Other Characteristics:
- Operating & storage temperature: -20 ~ 85°c
Interfaces
- 8 UART (TELEM / GPS / RC)
- 14 PWM outputs (10 supports DShot)
- Support multiple RC inputs (SBUS / CRSF / DSM)
- 1 GPS port
- 1 I2C port
- 2 ADC port2 (VBAT, Current)
- 1 DJI O3/O4 VTX connector
- 1 MicroSD Card Slot
- 1 USB Type-C
Electrical data
- VBAT Input:
- 2~6S (6~27V)
- USB Power Input:
- 4.75~5.25V
- BEC Output:
- 5V 2A (for controller, receiver, GPS, optical flow or other devices)
- 9V 2A (for video transmitter, camera)
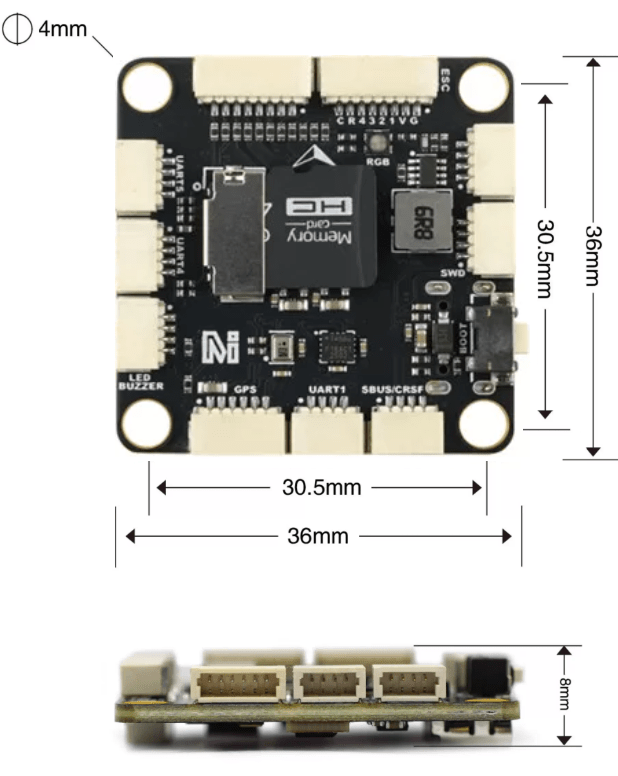
Mechanical data
- Mounting: 30.5 x 30.5mm, Φ4mm
- Dimensions: 36 x 36 x 8 mm
- Weight: 10g
Where to Buy
Order from MicoAir Tech Store.
Pinouts
Pinouts definition can be found in the MicoAir743-Lite_pinout.xlsx file.
Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | TELEM1 |
| USART2 | /dev/ttyS1 | GPS2 |
| USART3 | /dev/ttyS2 | GPS1 |
| UART4 | /dev/ttyS3 | TELEM2 |
| UART5 | /dev/ttyS4 | TELEM3 |
| USART6 | /dev/ttyS5 | RC |
| UART7 | /dev/ttyS6 | UART6 |
| UART8 | /dev/ttyS7 | TELEM4 |
Interfaces Diagram
INFO
All the connectors used on the board are SH1.0
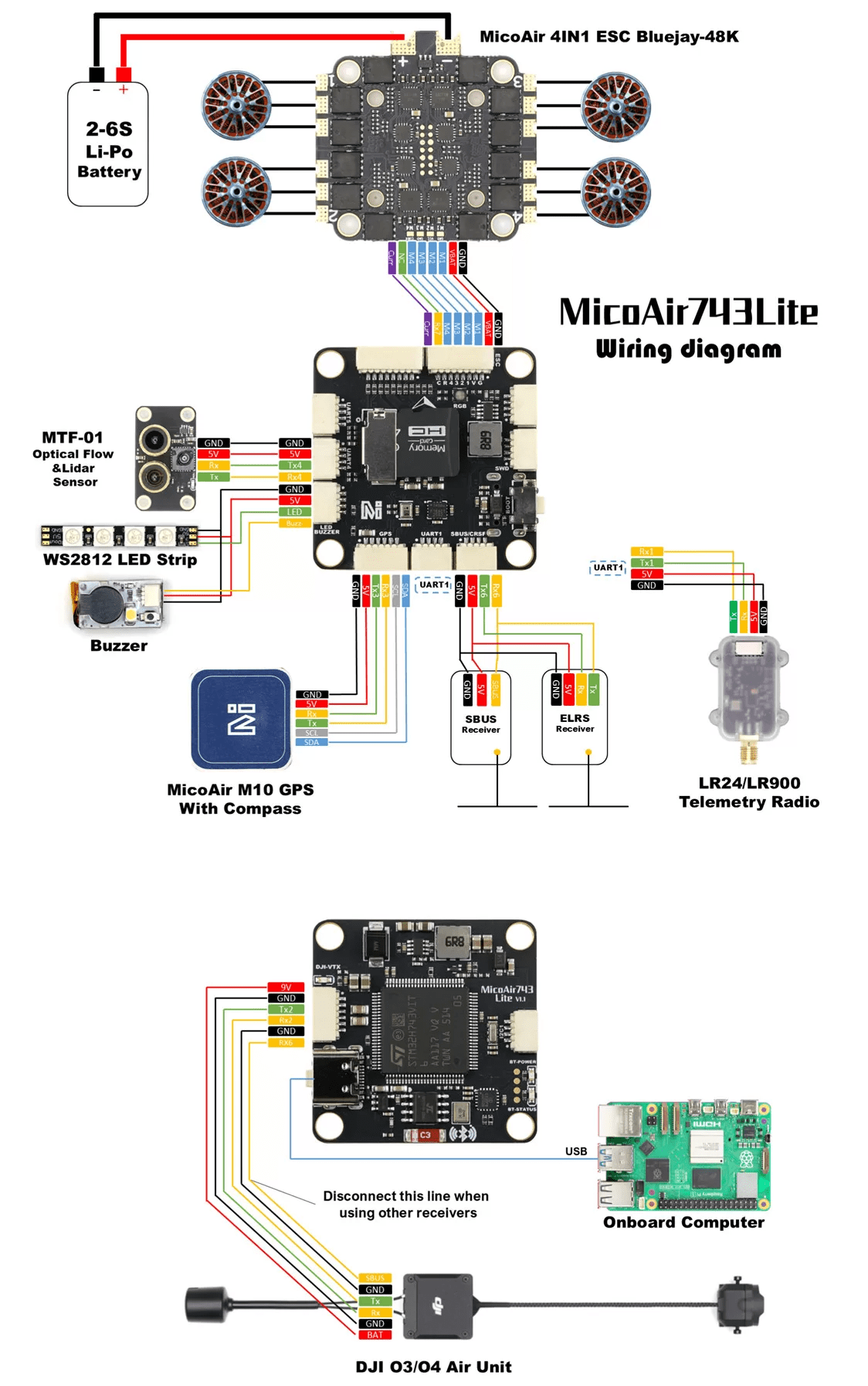
Sample Wiring Diagram
Building Firmware
To build PX4 for this target:
make micoair_h743-lite_defaultInstalling PX4 Firmware
The firmware can be installed in any of the normal ways:
Build and upload the source
shmake micoair_h743-lite_default uploadLoad the firmware using QGroundControl. You can use either pre-built firmware or your own custom firmware.
INFO
At time of writing the only pre-built software is
PX4 main(see Installing PX4 Main, Beta or Custom Firmware). Release builds will be supported for PX4 v1.17 and later.
Radio Control
A Radio Control (RC) system is required if you want to manually control your vehicle (PX4 does not require a radio system for autonomous flight modes).
The RC port is connected to the FMU and you can attach a receiver that uses the protocols DSM, SBUS, CSRF, GHST, or other protocol listed in Radio Control modules. You will need to enable the protocol by setting the corresponding parameter RC_xxxx_PRT_CFG, such as RC_CRSF_PRT_CFG for a CRSF receiver.
Supported Platforms / Airframes
Any multicopter / airplane / rover or boat that can be controlled with normal RC servos or Futaba S-Bus servos. The complete set of supported configurations can be seen in the Airframes Reference.