CBUnmanned H753-SOM
PX4 v1.18WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
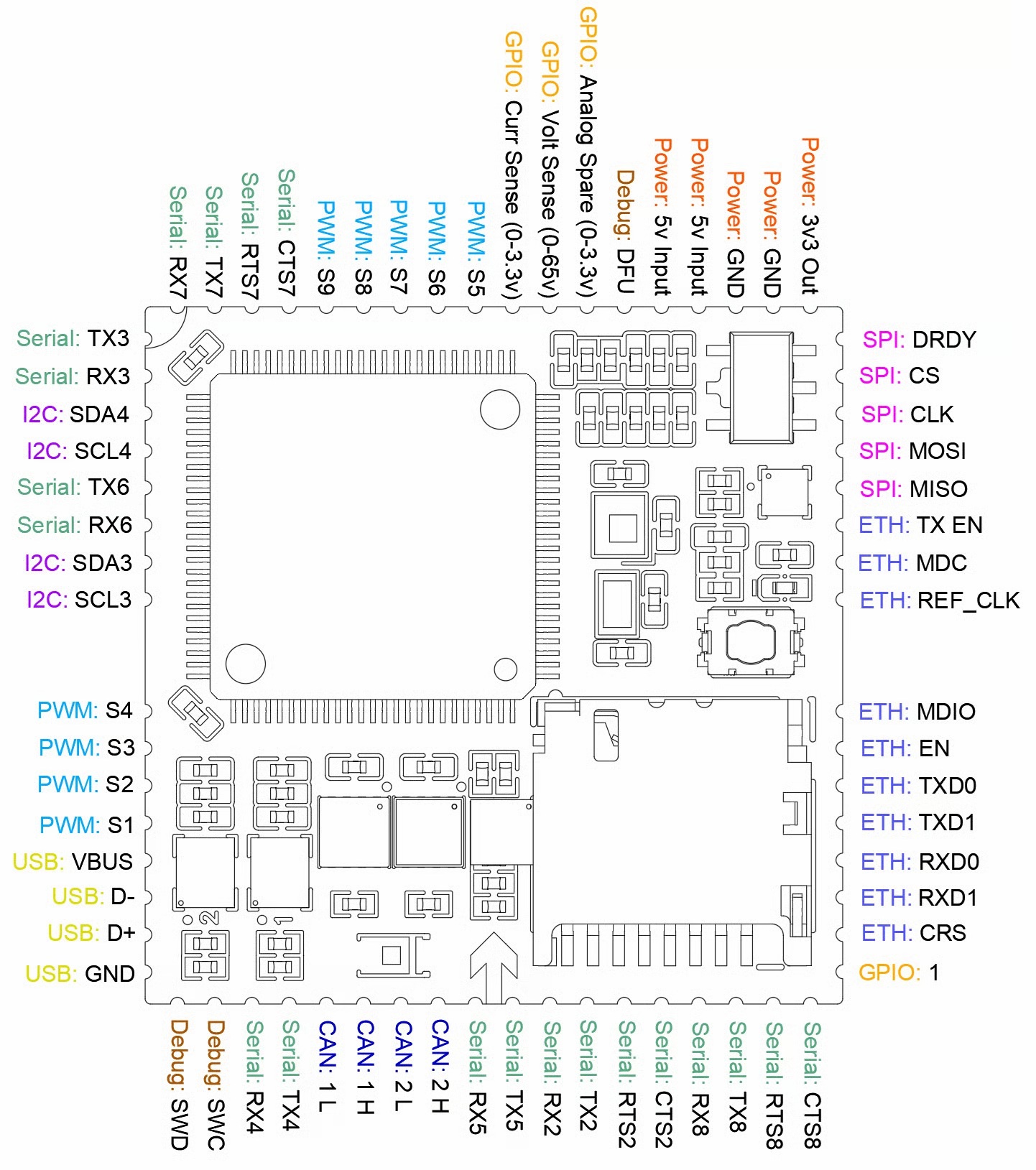
The CBUnmanned H753-SOM is a System-on-Module (SoM) flight controller built around the STM32H753 microcontroller. It is intended to be mounted on a carrier board that breaks out the I/O and provides power, peripherals, and connectors for a specific vehicle integration.
INFO
This flight controller is manufacturer supported.
Key Features
- MCU: STM32H753 (32-bit Arm® Cortex®-M7, 480 MHz, 2 MB Flash, 1 MB RAM)
- IMU: Dual InvenSense ICM-42670-P (on SPI4)
- Barometer: ST LPS22HB (on I2C1)
- Storage: microSD card (SDMMC2)
- Interfaces:
- 6x user UARTs (TEL1, TEL2, TEL3, GPS1, GPS2, RC) plus a debug console — flow control on TEL1/TEL2/TEL3
- 2x CAN (UAVCAN)
- 2x external I2C (one per GPS port for compass) and 1x internal I2C (barometer)
- 1x external SPI (the dual IMUs are on a separate internal SPI bus)
- 9x PWM outputs (DShot / Bi-Directional DShot supported)
- USB
- Ethernet optional
- Power: Powered from an external regulated 5 V supply (e.g. a BEC on the carrier board). Battery voltage (up to 65 V) and current are monitored via ADC; the voltage sense input is a separate pin behind a voltage divider and does not power the board.
INFO
CAN transceivers require a 5 V supply. USB-only power (≈4.5 V after the input diode) is not sufficient to operate the CAN bus.
Where to Buy
Check CBUnmanned for availability.
Building Firmware
TIP
Most users will not need to build this firmware. It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target from source:
make cbunmanned_h753-som_defaultSerial Port Mapping
| UART | Device | PX4 Default | Pins (TX / RX) | Flow Control (CTS / RTS) |
|---|---|---|---|---|
| USART2 | /dev/ttyS0 | TEL1 | PD5 / PA3 | PA0 / PD4 |
| USART3 | /dev/ttyS1 | GPS1 | PD8 / PD9 | — |
| UART4 | /dev/ttyS2 | GPS2 | PC10 / PC11 | — |
| UART5 | /dev/ttyS3 | Console | PC12 / PD2 | — |
| USART6 | /dev/ttyS4 | RC | PC6 / PC7 | — |
| UART7 | /dev/ttyS5 | TEL2 | PE8 / PE7 | PE10 / PE9 |
| UART8 | /dev/ttyS6 | TEL3 | PE1 / PE0 | PD14 / PD15 |
PWM Outputs
The board provides 9 PWM outputs, all of which support DShot and Bidirectional DShot.
The outputs are split across 4 timer groups:
| Outputs | Timer |
|---|---|
| 1, 2, 3 | Timer1 |
| 4, 5 | Timer2 |
| 6, 7, 8 | Timer3 |
| 9 | Timer4 |
All outputs within the same group must use the same protocol and update rate.
Debug Port
The system console runs on UART5 (PC12 / PD2). USB CDC ACM is auto-started and provides MAVLink access.
PX4 Bootloader Update
Boards that ship without the PX4 bootloader must have it flashed before PX4 firmware can be installed. Download the cbunmanned_h753-som_bootloader.bin bootloader binary and follow the DFU Bootloader Update instructions.
Once the PX4 bootloader is flashed, firmware can be installed normally via QGroundControl.