精准着陆
PX4 supports precision landing for multicopters on either stationary or moving targets. The target may be provided by an onboard IR sensor and a landing beacon, or by an offboard positioning system.
Precision landing can be started/initiated as part of a mission, in a Return mode landing, or by entering the Precision Land flight mode.
INFO
Precision landing is only possible with a valid global position (due to a limitation in the current implementation of the position controller).
综述
Land Modes
A precision landing can be configured to either be "required" or "opportunistic". The choice of mode affects how a precision landing is performed.
Required Mode
In Required Mode the vehicle will search for a target if none is visible when landing is initiated. The vehicle will perform a precision landing if a target is located.
The search procedure consists of climbing to the search altitude (PLD_SRCH_ALT). If the target is still not visible at the search altitude and after a search timeout (PLD_SRCH_TOUT), a normal landing is initiated at the current position.
INFO
If using an offboard positioning system PX4 assumes that the target is visible when it is receiving MAVLink LANDING_TARGET messages.
Opportunistic Mode
In Opportunistic Mode the vehicle will use precision landing if (and only if) the target is visible when landing is initiated. If it is not visible the vehicle immediately performs a normal landing at the current position.
Landing Phases
A precision landing has three phases:
Horizontal approach: The vehicle approaches the target horizontally while keeping its current altitude. Once the position of the target relative to the vehicle is below a threshold (PLD_HACC_RAD), the next phase is entered. If the target is lost during this phase (not visible for longer than PLD_BTOUT), a search procedure is initiated (during a required precision landing) or the vehicle does a normal landing (during an opportunistic precision landing).
Descent over target: The vehicle descends, while remaining centered over the target. If the target is lost during this phase (not visible for longer than
PLD_BTOUT), a search procedure is initiated (during a required precision landing) or the vehicle does a normal landing (during an opportunistic precision landing).Final approach: When the vehicle is close to the ground (closer than PLD_FAPPR_ALT), it descends while remaining centered over the target. If the target is lost during this phase, the descent is continued independent of the kind of precision landing.
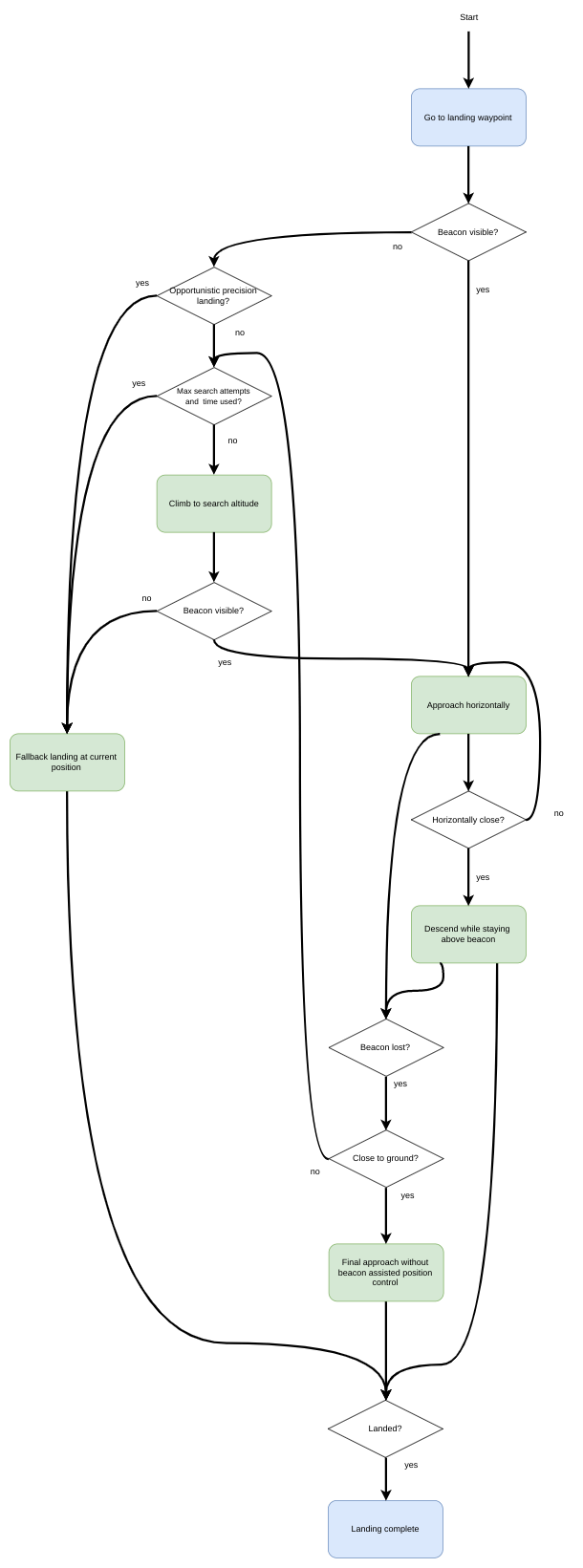
Search procedures are initiated in the first and second steps, and will run at most PLD_MAX_SRCH times. Landing Phases Flow Diagram
A flow diagram showing the phases can be found in landing phases flow Diagram below.
Initiating a Precision Landing
Precision landing can be used in missions, during the landing phase in Return mode, or by entering the Precision Land mode.
Mission Precision Landing
Precision landing can be initiated as part of a mission using MAV_CMD_NAV_LAND with param2 set appropriately:
0: Normal landing without using the target.1: Opportunistic precision landing.2: Required precision landing.
Return Mode Precision Landing
Precision landing can be used in the Return mode landing phase.
This is enabled using the parameter RTL_PLD_MD, which takes the following values:
0: Precision landing disabled (land as normal).1: Opportunistic precision landing.2: Required precision landing.
Precision Landing Flight Mode
Precision landing can be enabled by switching to the Precision Landing flight mode.
You can verify this using the QGroundControl MAVLink Console to enter the following command:
sh
commander mode auto:preclandINFO
When switching to the mode in this way, the precision landing is always "required"; there is no way to specify the type of landing.
INFO
At time of writing is no convenient way to directly invoke precision landing (other than commanding return mode):
- QGroundControl does not provide it as a UI option.
- MAV_CMD_NAV_LAND only works in missions.
- MAV_CMD_DO_SET_MODE should work, but you will need to determine the appropriate base and custom modes used by PX4 to represent the precision landing mode.
硬件安装
IR Sensor/Beacon Setup
The IR sensor/landing beacon solution requires an IR-LOCK Sensor and downward facing distance sensor connected to the flight controller, and an IR beacon as a target (e.g. IR-LOCK MarkOne). This enables landing with a precision of roughly 10 cm (GPS precision, by contrast, may be as large as several meters).
Install the IR-LOCK sensor by following the official guide. Ensure that the sensor's x axis is aligned with the vehicle's y axis and the sensor's y axis aligned with the vehicle's -x direction (this is the case if the camera is pitched down 90 degrees from facing forward).
Install a range/distance sensor (the LidarLite v3 has been found to work well).
INFO
Many infrared based range sensors do not perform well in the presence of the IR-LOCK beacon. Refer to the IR-LOCK guide for other compatible sensors.
Offboard Positioning
The offboard solution requires a positioning system that implements the MAVLink Landing Target Protocol. This can use any positioning mechanism to determine the landing target, for example computer vision and a visual marker.
The system must publish the coordinates of the target in the LANDING_TARGET message. Note that PX4 requires LANDING_TARGET.frame to be MAV_FRAME_LOCAL_NED and only populates the fields x, y, and z. The origin of the local NED frame [0,0] is the home position (you can map this home position to global coordinates using GPS_GLOBAL_ORIGIN).
PX4 does not explicitly require a distance sensor or other sensors, but will perform better if it can more precisely determine its own position.
Firmware Configuration
Precision landing requires the modules irlock and landing_target_estimator. These are included in PX4 firmware by default, for most flight controllers.
They are not included by default on FMUv2-based controllers. On these, and other boards where they are not included, you can add them by setting the following keys to 'y' in the relevant configuration file for your flight controller (e.g. as done here for FMUv5: PX4-Autopilot/boards/px4/fmu-v5/default.px4board):
CONFIG_DRIVERS_IRLOCK=y
CONFIG_MODULES_LANDING_TARGET_ESTIMATOR=yPX4 Configuration (Parameters)
The IR-Lock sensor is disabled by default. Enable it by setting SENS_EN_IRLOCK to 1 (true).
LTEST_MODE determines if the target is assumed to be stationary or moving. If LTEST_MODE is set to moving (e.g. it is installed on a vehicle on which the multicopter is to land), target measurements are only used to generate position setpoints in the precision landing controller. If LTEST_MODE is set to stationary, the target measurements are also used by the vehicle position estimator (EKF2 or LPE).
Other relevant parameters are listed in the parameter reference under Landing_target estimator and Precision land parameters. Some of the most useful ones are listed below.
| 参数 | 描述 |
|---|---|
| SENS_EN_IRLOCK | IR-LOCK Sensor (external I2C). Disable: 0 (default): Enable: 1). |
| LTEST_MODE | Landing target is moving (0) or stationary (1). Default is moving. |
| PLD_HACC_RAD | Horizontal acceptance radius, within which the vehicle will start descending. Default is 0.2m. |
| PLD_BTOUT | Landing Target Timeout, after which the target is assumed lost. Default is 5 seconds. |
| PLD_FAPPR_ALT | Final approach altitude. Default is 0.1 metres. |
| PLD_MAX_SRCH | Maximum number of search attempts in an required landing. |
| RTL_PLD_MD | RTL precision land mode. 0: disabled, 1: Opportunistic, 2: Required. |
IR Beacon Scaling
Measurement scaling may be necessary due to lens distortions of the IR-LOCK sensor.
LTEST_SCALE_X and LTEST_SCALE_Y can be used to scale beacon measurements before they are used to estimate the beacon's position and velocity relative to the vehicle. Note that LTEST_SCALE_X and LTEST_SCALE_Y are considered in the sensor frame, not the vehicle frame.
To calibrate these scale parameters, set LTEST_MODE to moving, fly your multicopter above the beacon and perform forward-backward and left-right motions with the vehicle, while logging landing_target_pose and vehicle_local_position. Then, compare landing_target_pose.vx_rel and landing_target_pose.vy_rel to vehicle_local_position.vx and vehicle_local_position.vy, respectively (both measurements are in NED frame). If the estimated beacon velocities are consistently smaller or larger than the vehicle velocities, adjust the scale parameters to compensate.
If you observe slow sideways oscillations of the vehicle while doing a precision landing with LTEST_MODE set to stationary, the beacon measurements are likely scaled too high and you should reduce the scale parameter in the relevant direction.
仿真
Precision landing with the IR-LOCK sensor and beacon can be simulated in Gazebo Classic.
To start the simulation with the world that contains a IR-LOCK beacon and a vehicle with a range sensor and IR-LOCK camera, run:
sh
make px4_sitl gazebo-classic_iris_irlockYou can change the location of the beacon either by moving it in the Gazebo Classic GUI or by changing its location in the Gazebo world.
Operating Principles
Landing Target Estimator
The landing_target_estimator takes measurements from the irlock driver as well as the estimated terrain height to estimate the beacon's position relative to the vehicle.
The measurements in irlock_report contain the tangent of the angles from the image center to the beacon. In other words, the measurements are the x and y components of the vector pointing towards the beacon, where the z component has length "1". This means that scaling the measurement by the distance from the camera to the beacon results in the vector from the camera to the beacon. This relative position is then rotated into the north-aligned, level body frame using the vehicle's attitude estimate. Both x and y components of the relative position measurement are filtered in separate Kalman Filters, which act as simple low-pass filters that also produce a velocity estimate and allow for outlier rejection.
The landing_target_estimator publishes the estimated relative position and velocity whenever a new irlock_report is fused into the estimate. Nothing is published if the beacon is not seen or beacon measurements are rejected. The landing target estimate is published in the landing_target_pose uORB message.
Enhanced Vehicle Position Estimation
If the target is specified to be stationary using the parameter LTEST_MODE, the vehicle's position/velocity estimate can be improved with the help of the target measurements. This is done by fusing the target's velocity as a measurement of the negative velocity of the vehicle.
Landing Phases Flow Diagram
This image shows the landing phases as a flow diagram.