包裹投递任务
PX4 v1.14包裹投递任务是航点任务的拓展,用户可以计划将包裹作为航点进行投递。
本节解释了包裹投递功能的架构。 它的目的是为从事扩展架构的开发者提供支持,例如支持新的有效载荷投递机制。
INFO
Currently only Grippers can be used for package delivery. 绞盘尚未支持。
INFO
The detailed documentation on how to setup a package delivery mission plan can be found here. Setup for the payload_deliverer module is covered in the documentation for the delivery mechanism, such as Gripper.
包裹投递架构图
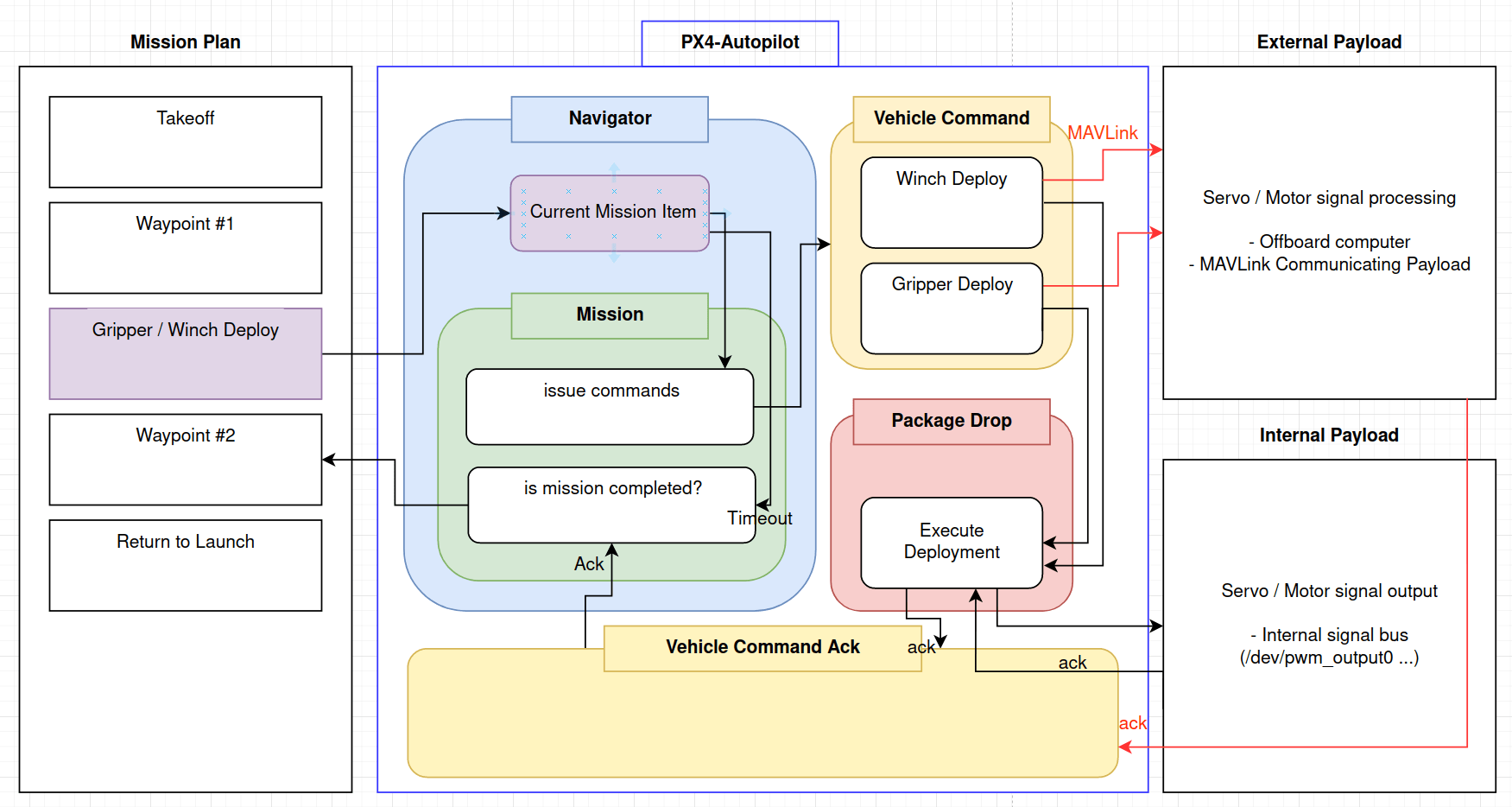
Package Delivery feature is centered around the VehicleCommand & VehicleCommandAck messages.
The central idea lies in having an entity that handles the DO_GRIPPER or DO_WINCH vehicle command, executes it and sends back an acknowledgement when the successful delivery is confirmed.
Because PX4 automatically broadcasts the VehicleCommand uORB message to a UART port configured to communicate in MAVLink as a COMMAND_LONG message, an external payload can receive the command and execute it.
Likewise, since PX4 automatically translates the COMMAND_ACK message coming in from an external source through a UART port configured for MAVLink into a vehicle_command_ack uORB message, an external payload's acknowledgement for a successful package deployment can be received by PX4's navigator module.
下面解释了包裹投递架构中涉及的每个实体。
导航器
导航器处理接收车辆命令 ACK (下文所述)。 在收到成功部署确认消息后,它会设置任务块级别中的标志,以表示有效载荷部署已成功。
这允许任务安全地继续到下一个项目(例如路径点),因为我们确信部署已成功得到确认。
车辆命令 ACK
We are waiting for the ACK coming from either internally (via payload_deliverer module), or externally (external entity sending the MAVLink message COMMAND_ACK) to determine if the package delivery action has been successful (either DO_GRIPPER or DO_WINCH).
Mission
The Gripper / Winch command is placed as a Mission Item. This is possible since all the Mission item has the MAV_CMD to execute (e.g. Land, Takeoff, Waypoint, etc) which can get set to either DO_GRIPPER or DO_WINCH.
In the Mission logic (green box above) if either Gripper/Winch mission item is reached, it implements brake_for_hold functionality (which sets the valid flag of the next mission item waypoint to false) for rotary wings (e.g. Multicopter) so that the vehicle would hold it's position while the deployment is getting executed.
固定翼飞机和其他车辆不考虑特殊制动条件。 所以如果你有一个固定翼的悬停任务,飞机在悬停的同时投递包裹,飞机不会停止 (因为这是不可能的)。
任务块
MissionBlock is the parent class of Mission that handles the part "Is Mission completed?".
This all performed in the is_mission_item_reached_or_completed function, to handle the time delay / mission item advancement.
Also it implements the actual issue_command function, which will issue a vehicle command corresponding to the mission item's MAV_CMD, which will then be received by an external payload or the payload_deliverer module internally.
Payload Deliverer
This is a dedicated module that handles gripper / winch support, which is used for the standard package delivery mission plan.
Setup for the payload_deliverer module is covered within setting up an actual package release mechanism setup documentation like Gripper.