Mission Mode (Multicopter)
")
Mission mode causes the vehicle to execute a predefined autonomous mission (flight plan) that has been uploaded to the flight controller. The mission is typically created and uploaded with a Ground Control Station (GCS) application like QGroundControl (QGC).
INFO
- This mode requires a global 3d position estimate (from GPS or inferred from a local position).
- The vehicle must be armed before this mode can be engaged.
- This mode is automatic - no user intervention is required to control the vehicle.
- 遥控开关可以在任何无人机上更改飞行模式。
- Stick movement will by default change the vehicle to Position mode unless prevented by the active failsafe state. This is true for multicopters and VTOL in hover.
- The yaw stick can optionally nudge vehicle heading during the mission without changing mode (see MPC_AUTO_NUDGING).
描述
Missions are usually created in a ground control station (e.g. QGroundControl) and uploaded prior to launch. They may also be created by a MAVLink API such as MAVSDK, and/or uploaded in flight.
Individual mission commands are handled in a way that is appropriate to multicopter flight characteristics (for example loiter is implemented as hover ).
INFO
Missions are uploaded onto a SD card that needs to be inserted before booting up the autopilot.
At high level all vehicle types behave in the same way when MISSION mode is engaged:
If no mission is stored, or if PX4 has finished executing all mission commands, or if the mission is not feasible:
- If flying the vehicle will hold.
- If landed the vehicle will "wait".
If a mission is stored and PX4 is flying it will execute the mission/flight plan from the current step.
- A
TAKEOFFitem is treated as a normal waypoint.
- A
If a mission is stored and PX4 is landed:
- PX4 will execute the mission/flight plan.
- If the mission does not have a
TAKEOFFitem then PX4 will fly the vehicle to the minimum altitude before executing the remainder of the flight plan from the current step.
If no mission is stored, or if PX4 has finished executing all mission commands:
- If flying the vehicle will hold.
- If landed the vehicle will "wait".
You can manually change the current mission command by selecting it in QGroundControl.
INFO
If you have a Jump to item command in the mission, moving to another item will not reset the loop counter. One implication is that if you change the current mission command to 1 this will not "fully restart" the mission.
:::
The mission will only reset when the vehicle is disarmed or when a new mission is uploaded.
TIP
To automatically disarm the vehicle after it lands, in QGroundControl go to Vehicle Setup > Safety, navigate to Land Mode Settings and check the box labeled Disarm after. Enter the time to wait after landing before disarming the vehicle.
:::
Missions can be paused by switching out of mission mode to any other mode (such as Hold mode or Position mode), and resumed by switching back to mission mode. If the vehicle was not capturing images when it was paused, on resuming it will head from its current position towards the same waypoint as it as was heading towards originally. If the vehicle was capturing images (has camera trigger items) it will instead head from its current position towards the last waypoint it traveled through (before pausing), and then retrace its path at the same speed and with the same camera triggering behaviour. This ensures that in survey/camera missions the planned path is captured. A mission can be uploaded while the vehicle is paused, in which case the current active mission item is set to 1.
INFO
When a mission is paused while the camera on the vehicle was triggering, PX4 sets the current active mission item to the previous waypoint, so that when the mission is restarted the vehicle will retrace its last mission leg. In addition, PX4 stores the last applied mission items for speed setting and camera triggering (from the already covered mission plan), and re-applies those settings on resuming the mission.
WARNING
Ensure that the throttle stick is non-zero before switching to any RC mode (otherwise the vehicle will crash). We recommend you centre the control sticks before switching to any other mode.
For more information about mission planning, see:
- Mission Planning
- Plan View (QGroundControl User Guide)
任务可行性检查
PX4 runs some basic sanity checks to determine if a mission is feasible when it is uploaded and before executing a mission. If any of the checks fail, the user is notified and it is not possible to start the mission (the vehicle will switch to Hold mode instead of Mission mode).
A subset of the most important checks are listed below:
- Any mission item conflicts with a plan or safety geofence
- Missing takeoff and/or land item when these are configured as a requirement (MIS_TKO_LAND_REQ)
Additionally there is a check if the first waypoint is too far from the Home position (MIS_DIST_1WP). The user is notified should the check fail, but it has no effect on the validity of a mission plan, meaning that the mission can still be started even if the distance is too high.
QGroundControl支持
QGroundControl provides additional GCS-level mission handling support (in addition to that provided by the flight controller).
有关详细信息,请参阅︰
Mission Parameters
Mission behaviour is affected by a number of parameters, most of which are documented in Parameter Reference > Mission. A very small subset are listed below.
General parameters:
| Parameter | 描述 |
|---|---|
| NAV_RCL_ACT | RC loss failsafe mode (what the vehicle will do if it looses RC connection) - e.g. enter hold mode, return mode, terminate etc. |
| MAN_OVERRIDE_SPD | Speed (normalized stick travel per second) above which moving the sticks controlling a multicopter (or VTOL in hover) gives control back to the pilot by switching to Position mode (or Altitude mode if position is unavailable). At the default value of 1 a half-stick movement in ~0.5 s triggers it; lower is more sensitive. A stick held statically has zero speed and will not trigger. Set to -1 to disable. PX4 v1.18 |
| MPC_AUTO_NUDGING | Bitmask enabling stick nudging in Auto modes (multicopter). Bit 0 (yaw nudging) lets the yaw stick nudge heading without switching modes; the heading is held when the stick is released. Switching flight mode (e.g. to Hold and back) clears the held heading and returns yaw to the mode default. Requires stick override to be disabled (MAN_OVERRIDE_SPD = -1). |
Parameters related to mission feasibility checks:
| Parameter | 描述 |
|---|---|
| MIS_DIST_1WP | There is a warning message if the distance of the first waypoint to Home is more than this value. Disabled if value is 0 or less. |
| FW_LND_ANG | Maximum landing slope angle. |
| MIS_TKO_LAND_REQ | Sets whether mission requires takeoff and/or landing items. No requirement by default for multicopter. |
Mission Commands
PX4 "accepts" the following MAVLink mission commands in Mission mode (with some caveats, given after the list). Unless otherwise noted, the implementation is as defined in the MAVLink specification.
Mission Items:
- MAV_CMD_NAV_WAYPOINT
- Param3 (flythrough) is ignored. Flythrough is always enabled if param 1 (time_inside) > 0.
- MAV_CMD_NAV_LOITER_UNLIM
- MAV_CMD_NAV_LOITER_TIME
- MAV_CMD_NAV_LAND
- MAV_CMD_NAV_TAKEOFF
- MAV_CMD_NAV_LOITER_TO_ALT
- MAV_CMD_DO_JUMP
- MAV_CMD_NAV_ROI
- MAV_CMD_DO_SET_ROI
- MAV_CMD_DO_SET_ROI_LOCATION
- MAV_CMD_DO_SET_ROI_WPNEXT_OFFSET
- MAV_CMD_DO_SET_ROI_NONE
- MAV_CMD_DO_CHANGE_SPEED
- MAV_CMD_DO_SET_HOME
- MAV_CMD_DO_SET_SERVO
- MAV_CMD_DO_LAND_START
- MAV_CMD_DO_TRIGGER_CONTROL
- MAV_CMD_DO_DIGICAM_CONTROL
- MAV_CMD_DO_MOUNT_CONFIGURE
- MAV_CMD_DO_MOUNT_CONTROL
- MAV_CMD_IMAGE_START_CAPTURE
- MAV_CMD_IMAGE_STOP_CAPTURE
- MAV_CMD_VIDEO_START_CAPTURE
- MAV_CMD_VIDEO_STOP_CAPTURE
- MAV_CMD_DO_SET_CAM_TRIGG_DIST
- MAV_CMD_DO_SET_CAM_TRIGG_INTERVAL
- MAV_CMD_SET_CAMERA_MODE
- MAV_CMD_NAV_DELAY
- MAV_CMD_NAV_RETURN_TO_LAUNCH
- MAV_CMD_DO_CONTROL_VIDEO
- MAV_CMD_DO_GIMBAL_MANAGER_PITCHYAW
- MAV_CMD_DO_GIMBAL_MANAGER_CONFIGURE
- MAV_CMD_OBLIQUE_SURVEY
- MAV_CMD_SET_CAMERA_ZOOM
- MAV_CMD_SET_CAMERA_FOCUS
- MAV_CMD_NAV_VTOL_TAKEOFF
MAV_CMD_NAV_VTOL_TAKEOFF.param2(transition heading) is ignored. Instead the heading to the next waypoint is used for the transition heading.
- MAV_CMD_DO_AUTOTUNE_ENABLE
- Disabling autotune by setting
param1to zero is currently not supported. To abort autotune during a mission, switch to another flight mode. - Axis selection specified in the MAVLink message is ignored (
param2must be set to 0) .
- Disabling autotune by setting
GeoFence Definitions
- MAV_CMD_NAV_FENCE_RETURN_POINT
- MAV_CMD_NAV_FENCE_POLYGON_VERTEX_INCLUSION
- MAV_CMD_NAV_FENCE_POLYGON_VERTEX_EXCLUSION
- MAV_CMD_NAV_FENCE_CIRCLE_INCLUSION
- MAV_CMD_NAV_FENCE_CIRCLE_EXCLUSION
Rally Points
INFO
Please add an issue report or PR if you find a missing/incorrect message.
- PX4 parses the above messages, but they are not necessary acted on. For example, some messages are vehicle-type specific.
- PX4 does not support local frames for mission commands (e.g. MAV_FRAME_LOCAL_NED).
- Not all messages/commands are exposed via QGroundControl.
- The list may become out of date as messages are added. You can check the current set by inspecting the code. Support is
MavlinkMissionManager::parse_mavlink_mission_itemin /src/modules/mavlink/mavlink_mission.cpp.
Mission Command Timeouts
Some mission commands/items can take time to complete, such as a gripper opening and closing, a winch extending or retracting, or a gimbal moving to point at a region of interest.
Where provided PX4 may use sensor feedback from the hardware to determine when the action has completed and then move to the next mission item. If not provided, or if the feedback is lost, a mission command timeout can be used to ensure that these kinds of actions will progress to the next mission item rather than blocking progression.
The timeout is set using the MIS_COMMAND_TOUT parameter. This should be set to be a small amount greater than the time required for the longest long-running action in the mission to complete.
Rounded turns: Inter-Waypoint Trajectory
PX4 expects to follow a straight line from the previous waypoint to the current target (it does not plan any other kind of path between waypoints - if you need one you can simulate this by adding additional waypoints).
MC vehicles will change the speed when approaching or leaving a waypoint based on the jerk-limited tuning. The vehicle will follow a smooth rounded curve towards the next waypoint (if one is defined) defined by the acceptance radius (NAV_ACC_RAD). The diagram below shows the sorts of paths that you might expect.
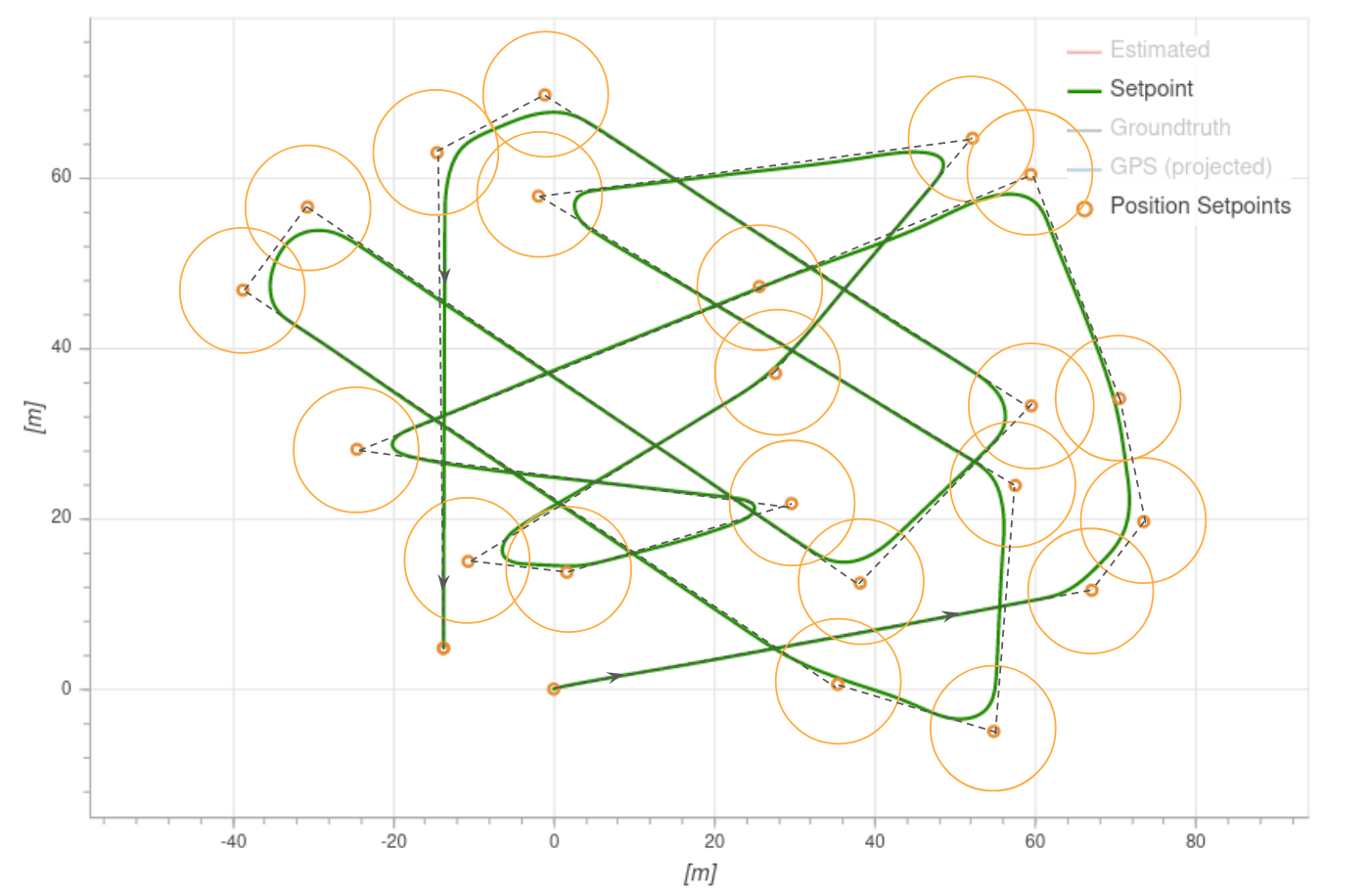
Vehicles switch to the next waypoint as soon as they enter the acceptance radius (NAV_ACC_RAD).
Mission Takeoff
Plan a multicopter mission takeoff by adding a TAKEOFF mission item to the map (this corresponds to the MAV_CMD_NAV_TAKEOFF MAVLink command).
During mission execution this will cause the vehicle to ascend vertically to the minimum takeoff altitude defined in the MIS_TAKEOFF_ALT parameter, then head towards the 3D position defined in the mission item.
If a mission with no takeoff mission item is started, the vehicle will ascend to the minimum takeoff altitude and then proceed to the first Waypoint mission item.
If the vehicle is already flying when the mission is started, a takeoff mission item is treated as a normal waypoint.