ROS 与 Gazebo 仿真。
ROS (Robot Operating System) can be used with PX4 and the Gazebo Classic simulator. It uses the MAVROS MAVLink node to communicate with PX4.
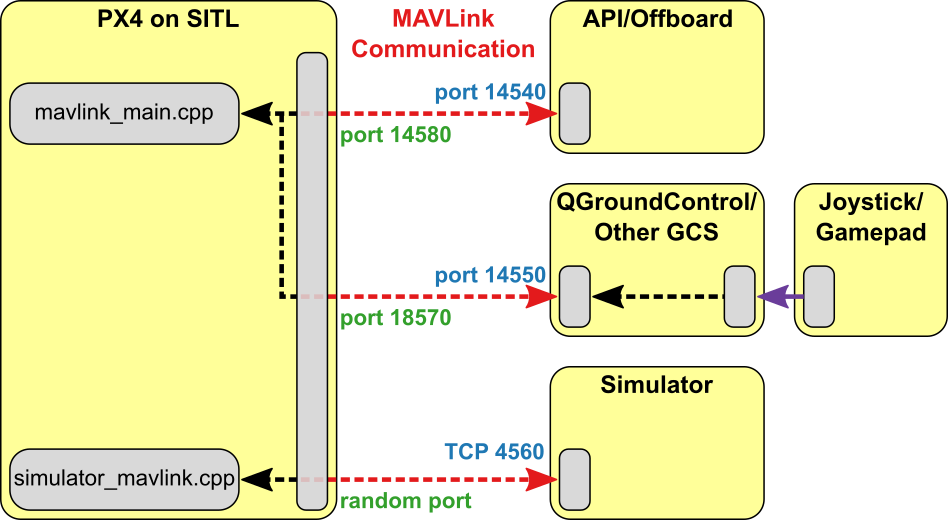
The ROS/Gazebo Classic integration with PX4 follows the pattern in the diagram below (this shows the generic PX4 simulation environment). PX4 communicates with the simulator (e.g. Gazebo Classic) to receive sensor data from the simulated world and send motor and actuator values. 它与 GCS 和 Offboard API(例如 ROS)通信,以从模拟环境发送遥测数据并接收命令。
INFO
The only slight difference to "normal behaviour" is that ROS initiates the connection on port 14557, while it is more typical for an offboard API to listen for connections on UDP port 14540.
Installing ROS and Gazebo Classic
ROS (1) with MAVROS Installation Guide explains how to set up a guide for working with ROS (1), MAVROS, and PX4.
INFO
ROS is only supported on Linux (not macOS or Windows).
启动 ROS/Simulation
The command below can be used to launch the simulation and connect ROS to it via MAVROS, where fcu_url is the IP / port of the computer running the simulation:
roslaunch mavros px4.launch fcu_url:="udp://:14540@192.168.1.36:14557"要运行包含在 ROS 中的 SITL,需要更新 ROS 环境,然后像往常一样启动:
cd <Firmware_clone>
make px4_sitl_default gazebo
source ~/catkin_ws/devel/setup.bash // (optional)
source Tools/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/sitl_gazebo
roslaunch px4 posix_sitl.launchINFO
It can be useful to call roslaunch with the -w NUM_WORKERS (override number of worker threads) and/or -v (verbose) in order to get warnings about missing dependencies in your setup. 例如:
cd <Firmware_clone>
make px4_sitl_default gazebo
source ~/catkin_ws/devel/setup.bash // (optional)
source Tools/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/sitl_gazebo
roslaunch px4 posix_sitl.launchLaunching Gazebo Classic with ROS Wrappers
The Gazebo Classic simulation can be modified to integrate sensors publishing directly to ROS topics e.g. the Gazebo Classic ROS laser plugin. To support this feature, Gazebo Classic must be launched with the appropriate ROS wrappers.
首先使用以下命令启动模拟器:
- posix_sitl.launch: plain SITL launch
- mavros_posix_sitl.launch: SITL and MAVROS
控制台将如下所示:
现在在新终端中确保您可以通过 Gazebo 菜单插入 Iris 模型,为此设置环境变量以包含相应的sitl_gazebo文件夹。
cd <PX4-Autopilot_clone>
DONT_RUN=1 make px4_sitl_default gazebo-classic
source ~/catkin_ws/devel/setup.bash # (optional)
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic
roslaunch px4 posix_sitl.launchInclude one of the above mentioned launch files in your own launch file to run your ROS application in the simulation.
事件之后发生了什么
This section shows how the roslaunch instructions provided previously actually work (you can follow them to manually launch the simulation and ROS).
You will need three terminals, in all of them the ros environment must be sourced.
First start the simulator using the command below:
cd <PX4-Autopilot_clone>
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
roslaunch px4 px4.launchThe console will look like this:
INFO [px4] instance: 0
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] startup script: /bin/sh etc/init.d-posix/rcS 0
INFO [init] found model autostart file as SYS_AUTOSTART=10016
INFO [param] selected parameter default file parameters.bson
INFO [param] importing from 'parameters.bson'
INFO [parameters] BSON document size 295 bytes, decoded 295 bytes (INT32:12, FLOAT:3)
INFO [param] selected parameter backup file parameters_backup.bson
INFO [dataman] data manager file './dataman' size is 7866640 bytes
etc/init.d-posix/rcS: 31: [: Illegal number:
INFO [init] PX4_SIM_HOSTNAME: localhost
INFO [simulator_mavlink] Waiting for simulator to accept connection on TCP port 4560In the second terminal make sure you will be able to start gazebo with the world files defined in PX4-Autopilot. To do this set your environment variables to include the appropriate sitl_gazebo-classic folders.
cd <PX4-Autopilot_clone>
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classicNow start Gazebo Classic like you would when working with ROS
roslaunch gazebo_ros empty_world.launch world_name:=$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic/worlds/empty.worldIn the third terminal make sure you will be able to spawn the model with the sdf files defined in PX4-Autopilot. To do this set your environment variables to include the appropriate sitl_gazebo-classic folders.
cd <PX4-Autopilot_clone>
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classicNow insert the Iris quadcopter model like you would when working with ROS. Once the Iris is loaded it will automatically connect to the px4 app.
rosrun gazebo_ros spawn_model -sdf -file $(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris/iris.sdf -model iris -x 0 -y 0 -z 0 -R 0 -P 0 -Y 0