ARK Flow MR
ARK Flow MR ("Mid Range") is an open source DroneCAN optical flow, distance sensor, and IMU module. It is the next generation of the Ark Flow, designed for mid-range applications.

购买渠道
Order this module from:
- ARK Electronics (US)
Hardware Specifications
- Open Source Schematic and BOM
- 传感器
- PixArt PAA3905 Optical Flow Sensor
- Auto detection of challenging conditions, such as checker boards, stripes, glossy surface and yawing
- Wide working range from 80mm up to infinity
- Automatic switching of Operation Mode
- 40mW IR LED built onto board for improved low light operation
- Broadcom AFBR-S50LX85D Time-of-Flight Distance Sensor
- Laser Opening Angle of 2° x 2°
- Typical distance range up to 50m
- Operation in up to 200 kilolux ambient light
- Works well on all surface conditions
- PixArt PAA3905 Optical Flow Sensor
- Invensense IIM-42653 6-Axis IMU
- Two Pixhawk Standard CAN Connectors (4 Pin JST GH)
- Pixhawk Standard Debug Connector (6 Pin JST SH)
- Software controlled built-in CAN termination resistor via node parameter (CANNODE_TERM)
- Small Form Factor
- 3cm x 3cm x 1.4cm
- LED Indicators
- USA Built
硬件安装
布线
The ARK Flow MR is connected to the CAN bus using a Pixhawk standard 4 pin JST GH cable. For more information, refer to the CAN Wiring instructions.
Mounting
The recommended mounting orientation is with the connectors on the board pointing towards back of vehicle, as shown in the following picture.
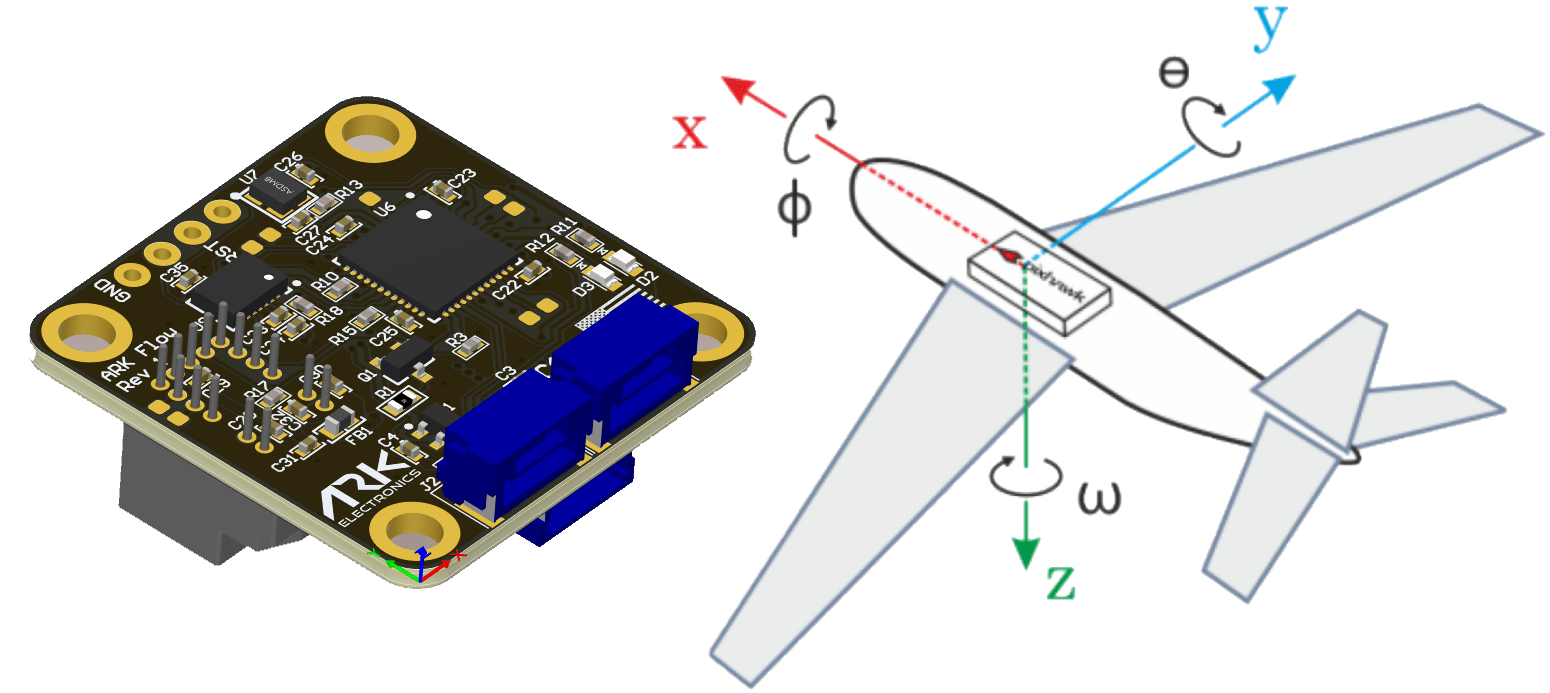
This corresponds to the default value (0) of the parameter SENS_FLOW_ROT. Change the parameter appropriately if using a different orientation.
The sensor can be mounted anywhere on the frame, but you will need to specify the focal point position, relative to vehicle centre of gravity, during PX4 configuration.
Firmware Setup
ARK Flow MR runs the PX4 DroneCAN Firmware. As such, it supports firmware update over the CAN bus and dynamic node allocation.
ARK Flow MR boards ship with recent firmware pre-installed, but if you want to build and flash the latest firmware yourself see PX4 DroneCAN Firmware > Building the Firmware.
- Firmware target:
ark_can-flow-mr_default - Bootloader target:
ark_can-flow-mr_canbootloader
Flight Controller Setup
INFO
The Ark Flow MR will not boot if there is no SD card in the flight controller when powered on.
Enable DroneCAN
步骤如下:
- In QGroundControl set the parameter UAVCAN_ENABLE to
2for dynamic node allocation (or3if using DroneCAN ESCs) and reboot (see Finding/Updating Parameters). - Connect ARK Flow MR CAN to the Pixhawk CAN.
Once enabled, the module will be detected on boot. Flow data should arrive at 100Hz. Distance sensor data should arrive at 40Hz.
DroneCAN configuration in PX4 is explained in more detail in DroneCAN > Enabling DroneCAN.
PX4 配置
You need to set the EKF optical flow parameters to enable fusing optical flow measurements for velocity calculation, set necessary DroneCAN parameters, and define offsets if the sensor is not centred within the vehicle.
Set the following parameters in QGroundControl:
- Enable optical flow fusion by setting EKF2_OF_CTRL.
- To optionally disable GPS aiding, set EKF2_GPS_CTRL to
0. - Enable UAVCAN_SUB_FLOW.
- Enable UAVCAN_SUB_RNG.
- Set EKF2_RNG_CTRL to
1. - Set EKF2_RNG_A_HMAX to
10. - Set EKF2_RNG_QLTY_T to
0.2. - Set UAVCAN_RNG_MIN to
0.08. - Set UAVCAN_RNG_MAX to
50. - Set SENS_FLOW_MINHGT to
0.08. - Set SENS_FLOW_MAXHGT to
25. - Set SENS_FLOW_MAXR to
7.4to match the PAW3902 maximum angular flow rate. - The parameters EKF2_OF_POS_X, EKF2_OF_POS_Y and EKF2_OF_POS_Z can be set to account for the offset of the Ark Flow MR from the vehicle centre of gravity.
Ark Flow MR Configuration
You may need to configure the following parameters on the ARK Flow MR itself:
| Parameter | 描述 |
|---|---|
| CANNODE_NODE_ID | CAN node ID (0 for dynamic allocation). If set to 0 (default), dynamic node allocation is used. Set to 1-125 to use a static node ID. |
| CANNODE_TERM | CAN built-in bus termination. |
LED含义
- Blinking green is normal operation
- Rapid blinking blue and red is firmware update
If you see a solid red LED there is an error and you should check the following:
- Make sure the flight controller has an SD card installed.
- Make sure the Ark Flow MR has
ark_can-flow-mr_canbootloaderinstalled prior to flashingark_can-flow-mr_default. - Remove binaries from the root and ufw directories of the SD card and try to build and flash again.
视频
PX4 holding position using the ARK Flow MR sensor for velocity estimation (in Position Mode).
另见
- ARK Flow MR (ARK Docs)