Altitude Cruise Mode (Multicopter)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
")
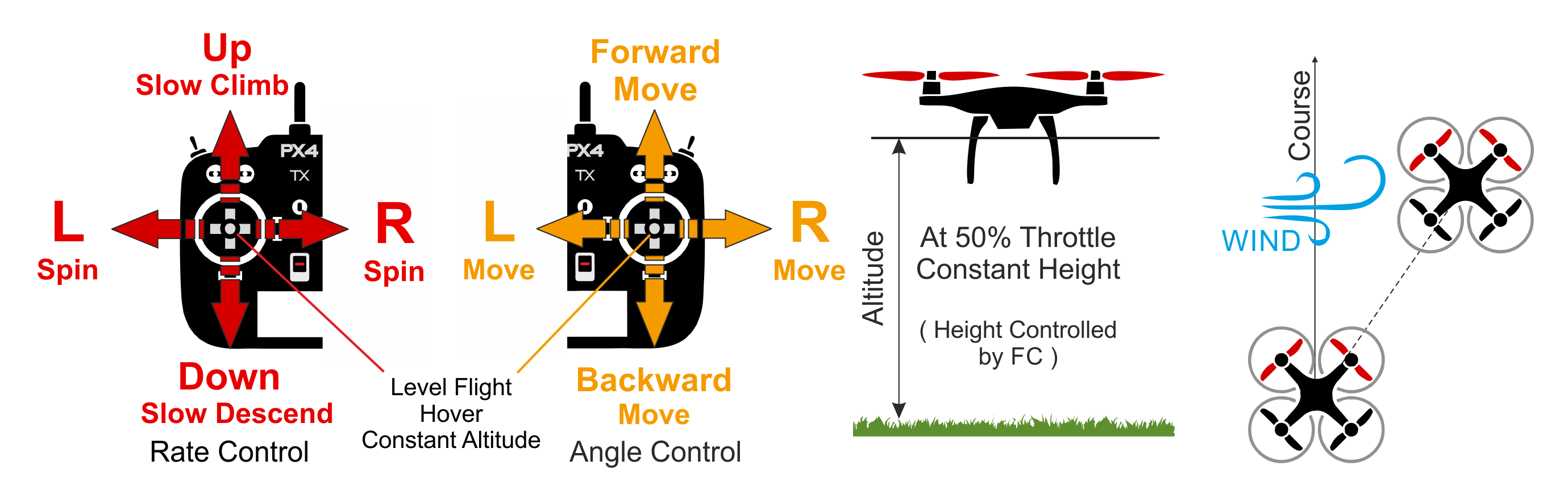
Altitude Cruise mode is a relatively easy-to-fly manual control mode in which roll and pitch sticks control vehicle movement in the left-right and forward-back directions (relative to the "front" of the vehicle), yaw stick controls rate of rotation over the horizontal plane, and throttle controls speed of ascent-descent.
When the sticks are released/centered the vehicle will keep the current tilt and heading angle and maintain the current altitude. If moving in the horizontal plane the vehicle will accelerate until the wind resistance equals the acceleration caused by the set tilt angle. The vehicle will then continue to move with a constant velocity (unlike for Altitude mode, in which the vehicle will eventually slow down and stop). If the wind blows the aircraft will drift in the direction of the wind even if flying perfectly level.
TIP
Altitude Cruise mode is intended for long distance flights where the same tilt angle is kept for a long period of time. It is just like Altitude mode but does not go back to level tilt when the sticks are released.
The diagram below shows the mode behaviour visually (for a mode 2 transmitter).
技术总结
A manual mode that is similar to Altitude mode but with different interpretation of roll and pitch sticks.
- Centered sticks:
- Roll/Pitch sticks: the current tilt is kept.
- Yaw: the current heading is kept.
- Throttle (~50%) holds current altitude.
- 外部中心:
- Roll/Pitch sticks control the rate of change of the tilt angle, resulting in corresponding left-right and forward-back movement. A maximum stick deflection results in a tilting rate setpoint to go from level to max tilt within 0.5 seconds.
- Yaw stick deflection rotates the tilt angle either left or right, causing the vehicle to change course. It is not causing a direct rotation around the body yaw axis like in Acro mode.
- 油门摇杆以预定的最大速率(和其他轴上的移动速度)控制上升速度。
- 起飞:
- 降落时,如果将油门杆抬高至 62.5%(从油门杆最低开始的整个范围),无人机将起飞。
- Manual control input is required (such as RC control, joystick) to enter this mode. Other than in all other manual modes, it's though possible to disable the manual control loss failsafe by setting the corresponding flag in COM_RCL_EXCEPT. In that case the current altitude, tilt and heading are kept until the manual control link is regained or the mode is exited. It is highly recommended to only disable the manual control loss failsafe for this mode if there is a stable data link connection to the vehicle at all times, and to enable the data link loss failsafe through NAV_DLL_ACT.
参数
Most of the relevant parameters are already covered in the corresponding section in the Altitude mode. Here a list of parameters of particular importance for Altitude Cruise.
| Parameter | 描述 |
|---|---|
| COM_RCL_EXCEPT | The manual control failsafe can be disabled for Altitude Cruise by setting the corresponding bit in this parameter. |
| NAV_DLL_ACT | Data link lost failsafe action. Recommended to set if the manual control failsafe is disabled to avoid fly-aways. |
| MPC_MAN_TILT_MAX | The maximum tilt angle the vehicle will go to. At max stick deflection, it will take 0.5 seconds from level flight to this tilt angle. |