ROS 2 用户指南
ROS 2-PX4 架构在ROS 2和PX4之间进行了深度整合。 允许 ROS 2 订阅或发布节点直接使用 PX4 uORB 话题。
本指南介绍了系统架构和应用程序流程,并解释了如何与PX4一起安装和使用ROS2。
INFO
从 PX4 v1.14, ROS 2 使用 uXRCE-DDS 中间件替换版本 1 中使用的 FastRTPS 中间件. 3 (v1.13不支持uXRCE-DDS)。
migration guide 解释您需要做什么来将ROS2 应用程序从 PX4 v1.13 迁移到 PX4 v1.14。
If you're still working on PX4 v1.13, please follow the instructions in the PX4 v1.13 Docs.
综述
得益于 uXRCE-DDS 通信中间件的使用,ROS 2 的应用流程非常简单直接。

uXRCE-DDS 中间件由两部分组成:一部分是运行在 PX4 上的客户端,另一部分是运行在机载计算机上的代理;二者之间通过串口、UDP、TCP或自定义链路进行双向数据交换。 代理充当客户端的代理角色,以便在全局 DDS 数据空间中发布和订阅主题。
PX4 uxrce_dds_client 是在构建时生成,并且默认包含在 PX4 固件中。 它包含“通用”XRCE-DDS客户端代码和它用来发布到来自uORB主题的 PX4 特定转换代码。 生成到客户端中的 uORB 消息子集在 dds_topics.yaml中说明。 生成器使用源代码树中的 uORB 消息定义:PX4-Autopilot/msg 用于生成发送 ROS 2 消息的代码。
ROS 2 应用程序需要在一个工作空间中构建,该工作空间需包含与 PX4 固件中创建 uXRCE-DDS 客户端模块时所用完全相同的消息定义。 您可以通过克隆接口包PX4/px4_msgs将这些内容纳入您的 ROS 2 工作空间(repo 中的范围与不同的 PX4 版本的消息相对应)。
从 PX4 v1.16 版本开始message versioning,ROS 2 应用程序所使用的消息定义版本,可与构建 PX4 时所用的消息定义版本不同。 这需要ROS 2 Message Translation Node运行ROS 2 消息转换节点,以确保消息能够正确转换和交互。
需要注意的是,微型XRCE-DDS agent 本身并不依赖客户端代码。 它可以从 source 中单独构建,或者作为ROS构建的一部分,或者作为snap包安装。
在使用 ROS 2 时,您通常需要同时启动客户端和代理。 需要注意的是,uXRCE-DDS 客户端默认已内置到固件中,但除仿真器构建版本外,不会自动启动。
INFO
在 PX4 v1.13 及更早版本中,ROS 2 依赖于 px4_ros_com 中的消息定义。 该代码仓库已不再需要,但其中包含一些实用的示例。
安装与设置
支持和推荐使用 PX4 的 ROS 2 平台是 Ubuntu 的 ROS 2 “简易” LTS 22.04。
TIP
如果您在 Ubuntu 20.04 上工作,我们建议您更新到 Ubuntu 22.04。 同时,你可以在 Ubuntu 20.04 上使用 Gazebo Class 的 ROS 2 "Foxy" 。 请注意,第二号外空系统“Foxy”在2023年5月到达寿命终结,但在撰写本报告时仍然稳定并与PX4合作。
安装使用 PX4 的 ROS 2:
- Install PX4 (to use the PX4 simulator)
- Install ROS 2
- Setup Micro XRCE-DDS Agent & Client
- Build & Run ROS 2 Workspace
该架构中会自动安装的其他依赖项(如 Fast DDS)未在此处提及。
安装PX4
若要使用该仿真器,你需要安装 PX4 开发工具链。
INFO
唯一依赖于ROS2的 PX4 是一组信息定义,它从px4_msgs获取。 您只需要安装 PX4 当您需要模拟器时(如我们在本指南中所做的那样), 或者如果您正在创建一个发布自定义uORB主题的构建。
通过以下方式在 Ubuntu 上配置一个 PX4 开发环境:
cd
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
cd PX4-Autopilot/
make px4_sitl请注意,上述命令将为您的Ubuntu版本安装推荐的模拟器。 如果您想要安装 PX4,但保留您现有的模拟器安装,请使用 "--no-sim-tools" 标志运行 ubuntu.sh。
欲了解更多信息和故障排除,请参阅:Ubuntu 开发环境 和 下载 PX4 源。
安装 ROS 2
安装 ROS 2 及其依赖:
安装 ROS 2.
:::
::::
一些Python 依赖关系也必须安装 (使用
pip或apt):shpip install --user -U empy==3.3.4 pyros-genmsg setuptools
配置微型 XRCE-DDS 代理与客户端
要实现 ROS 2 与 PX4 的通信,uXRCE-DDS client必须在 PX4 上运行,且需与运行在机载计算机上的微型 XRCE-DDS 代理建立连接。
设置代理(Agent)
代理可以安装在机载计算机上 number of ways。 下文将介绍如何从源代码 “独立” 构建代理,并连接到运行在 PX4 仿真器上的客户端。
设置并启动代理:
打开一个终端。
输入以下命令从仓库获取源代码并构建代理(Agent):
shgit clone -b v2.4.3 https://github.com/eProsima/Micro-XRCE-DDS-Agent.git cd Micro-XRCE-DDS-Agent mkdir build cd build cmake .. make sudo make install sudo ldconfig /usr/local/lib/启动代理并设置以连接运行在模拟器上的 uXRCE-DDS客户端(Client):
shMicroXRCEAgent udp4 -p 8888
代理现已启动,但在我们启动 PX4(下一步) 之前,你不会看到太多。
INFO
你可以让代理在这个终端中保持运行状态! 需注意,每个连接通道仅允许运行一个代理
启动客户端(Client)
PX4 仿真器会自动启动 uXRCE-DDS 客户端,并连接到本地主机上的 UDP 8888 端口。
启动模拟器(和客户端):
在之前安装好的 PX4 自动驾驶仪 代码仓库的根目录下,打开一个新的终端。
:::
::::
代理和客户端现已运行并二者应已建立连接。
PX4 终端会显示 NuttShell/PX4 System Console 系统控制台 的输出内容,该输出会在 PX4 启动和运行过程中实时呈现。 代理一建立连接,输出内容中就应包含 INFO 级别的消息,这些消息会显示数据撰写器的创建情况:
...
INFO [uxrce_dds_client] synchronized with time offset 1675929429203524us
INFO [uxrce_dds_client] successfully created rt/fmu/out/failsafe_flags data writer, topic id: 83
INFO [uxrce_dds_client] successfully created rt/fmu/out/sensor_combined data writer, topic id: 168
INFO [uxrce_dds_client] successfully created rt/fmu/out/timesync_status data writer, topic id: 188微型 XRCE-DDS 代理终端也应开始显示输出内容,因为在 DDS 网络中会创建对应的主题:
...
[1675929445.268957] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x00000001, publisher_id: 0x0DA(3), participant_id: 0x001(1)
[1675929445.269521] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x00000001, datawriter_id: 0x0DA(5), publisher_id: 0x0DA(3)
[1675929445.270412] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x00000001, topic_id: 0x0DF(2), participant_id: 0x001(1)构建ROS 2 工作空间
本节介绍如何在你的主目录中创建一个 ROS 2 工作空间(可根据需要修改命令,将源代码放置到其他位置)。
px4_ros_com 和 px4_msgs 这两个功能包会被克隆到工作空间文件夹中,之后使用 colcon 工具对该工作空间进行构建 此示例使用 "ros2 launch" 运行。
您应该使用一个 px4msgs 包的版本与 _same 消息定义作为您已经安装在上面步骤中的 PX4 固件。 px4_msgs 代码仓库中的分支均以特定名称命名,这些名称与不同 PX4 版本的消息定义一一对应。 如果出于任何原因,您不能确保您的 PX4 固件和 ROS 2 px4_msgs 包之间具有相同的消息定义。 您还需要 start the message translation node,作为您设置过程的一部分。
INFO
该示例会构建 ROS 2 Listener 示例应用程序,该程序位于 px4_ros_com中。 px4_msgs 也是需要的,以便示例能够解释PX4 ROS 2 主题。
构建工作空间
要创建和构建工作空间:
打开一个新的终端。
使用以下方式创建并进入一个新的工作空间目录:
shmkdir -p ~/ws_sensor_combined/src/ cd ~/ws_sensor_combined/src/INFO
一个为工作空间文件夹制定命名规范,有助于更轻松地管理工作空间。
:::
将示例代码仓库和 px4_msgs 克隆到 /src 目录下(默认克隆 main 分支,该分支与我们当前运行的 PX4 版本相对应):
shgit clone https://github.com/PX4/px4_msgs.git git clone https://github.com/PX4/px4_ros_com.git在当前终端中加载 ROS 2 开发环境,并使用 colcon 工具编译工作空间:
:::
::::
该操作会使用已加载的工具链对 /src 目录下的所有文件夹进行构建。
运行示例
要运行你刚刚构建好的可执行文件,需加载local_setup.bash 。 这提供了当前工作空间的 "environment hooks"访问权限。 换句话说,它会让刚刚构建好的可执行文件在当前终端中可用。
INFO
ROS2 初学者教程建议您_打开一个新的终端来运行您的可执行文件。
在新终端中:
进入工作空间目录的顶层,并加载 ROS 2 环境(本例中为 “Humble” 版本):
:::
::::
加载 local_setup.bash
shsource install/local_setup.bash现在启动示例。 请注意,此处我们使用的是 ros2 launch,其相关说明如下。
shros2 launch px4_ros_com sensor_combined_listener.launch.py
若此功能正常运行,你应能在启动 ROS 监听器的终端 / 控制台上看到数据正在打印输出
RECEIVED DATA FROM SENSOR COMBINED
================================
ts: 870938190
gyro_rad[0]: 0.00341645
gyro_rad[1]: 0.00626475
gyro_rad[2]: -0.000515705
gyro_integral_dt: 4739
accelerometer_timestamp_relative: 0
accelerometer_m_s2[0]: -0.273381
accelerometer_m_s2[1]: 0.0949186
accelerometer_m_s2[2]: -9.76044
accelerometer_integral_dt: 4739(可选) 启动转化节点
PX4 v1.16 Experimental此示例由 PX4 和ROS 2 版本构建,它们使用相同的消息定义。 若你要使用不兼容的 message versions,则在运行示例之前,还需要安装并运行Message Translation Node:
通过运行以下脚本,将 Message Translation Node 纳入示例工作空间或单独的工作空间中
shcd /path/to/ros_ws /path/to/PX4-Autopilot/Tools/copy_to_ros_ws.sh .构建并运行转化节点:
shcolcon build source install/local_setup.bash ros2 run translation_node translation_node_bin
控制机体
要控制应用,ROS 2 应用程序:
- 订阅 (聆听) PX4 发布的数传主题
- 发布到导致PX4执行某些操作的主题。
您可以使用的主题定义在dds_topics.yaml, 并且您可以在 uORB Message Reference获取更多关于他们数据的信息。 例如,VehicleGlobalPosition 可以用来获得机体的全局位置。 VehicleCommand 可以用于命令诸如起飞和降落等操作。
下面的 ROS 2 Example applications 示例提供了如何使用这些主题的具体例子。
兼容性问题
本节包含的信息可能会影响你编写 ROS 代码的方式。
ROS 2 订阅者QoS 设置
用于订阅 PX4 发布的话题的 ROS 2 代码,必须指定合适(兼容)的 QoS(服务质量)设置,才能监听这些话题。 具体而言,节点应使用 ROS 2 预定义的 QoS 传感器数据(可参考listener example source code)进行订阅:
...
rmw_qos_profile_t qos_profile = rmw_qos_profile_sensor_data;
auto qos = rclcpp::QoS(rclcpp::QoSInitialization(qos_profile.history, 5), qos_profile);
subscription_ = this->create_subscription<0>("/fmu/out/sensor_combined", qos,
...需要这样做的原因是,ROS 2 的默认 Quality of Service (QoS) settings与 PX4 所使用的设置不同。 并非所有发布者 - 订阅者的 Qos settings are possible,而事实证明,ROS 2 默认的订阅者设置就属于不可行的情况!需注意,ROS 代码在发布时无需设置 QoS参数(在此场景下,PX4 的 QoS 设置与 ROS 的默认 QoS 设置是兼容的)。
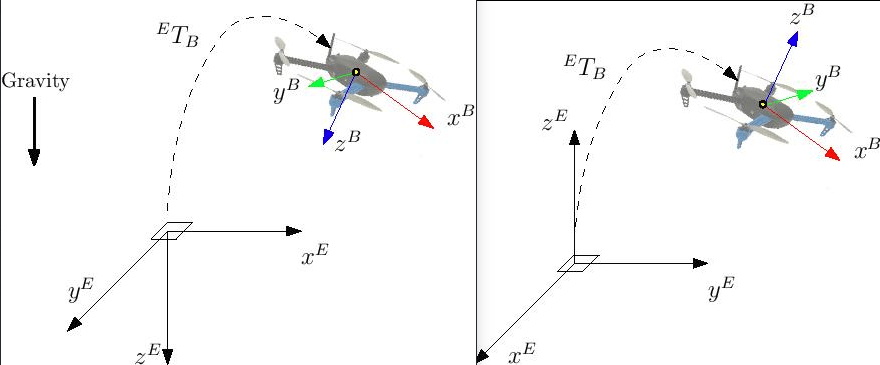
ROS 2 & PX4 坐标系公约
ROS与 PX4所使用的本地 / 世界坐标系和机体坐标系存在差异。
| 框架 | PX4 | ROS |
|---|---|---|
| 机体 | FRD (X Forward, Y Right, Z Down) | FLU (X Forward, Y Left, Z Up) |
| 世界坐标系 | FRD or NED (X North, Y East, Z Down) | FLU 或 ENU (X East, Y North, Z Up) |
TIP
See REP105: Coordinate Frames for Mobile Platforms for more information about ROS frames.
如果你把机体命名为 robot1,你会得到一个主题,比如 /vrpn_client_node/robot1/pose
除非在相关消息定义中明确指定,否则所有PX4 话题均采用 FRD(即 NED)坐标系约定。 因此,想要与 PX4 进行交互的 ROS 2 节点,必须妥善处理坐标系约定问题。
要将一个向量从ENU坐标系旋转到NED坐标系,必须执行两个基本旋转操作:
- 首先是绕 Z 轴(朝上方向)旋转 π/2 弧度。
- 然后是绕 X 轴(原东向 / 新北向)旋转 π 弧度
要将一个向量从NED坐标系旋转到ENU坐标系,必须执行两个基本旋转操作:
- 首先是绕 Z 轴(朝下方向)旋转 π/2 弧度。
- 然后是绕 X 轴(原北向 / 新东向)旋转 π 弧度。 需注意,这两种最终得到的操作在数学上是等效的
将向量从 FLU坐标系旋转到 FRD坐标系,仅需绕 X 轴(朝前方向)旋转 π 弧度即可。
将向量从 FRD坐标系旋转到 FLU坐标系,仅需绕 X 轴(朝前方向)旋转 π 弧度即可。
需要进行旋转处理的向量示例包括:
- TrajectorySetpoint消息中的所有字段;发送这些字段前,需先将其从 ENU坐标系转换为 NED坐标系。
- VehicleThrustSetpoint消息中的所有字段;发送这些字段前,需先将其从 FLU坐标系转换为 FRD坐标系。
与向量类似,用于表示飞行器(机体坐标系)相对于(w.r.t.)姿态的四元数也是如此。 (相对于)世界坐标系(的四元数)需要进行转换。
PX4/px4_ros_com 提供了名为 frame_transforms的共享库,可便捷地执行此类转换操作。
ROS, Gazebo 和 PX4 时间同步
默认情况下,ROS 2 与 PX4 之间的时间同步由uXRCE-DDS middleware 自动管理;若需查看时间同步统计信息,可监听已桥接的话题 /fmu/out/timesync_status。 当 uXRCE-DDS 客户端运行在飞控器上,且代理运行在机载计算机上时,这便是理想的运行状态 —— 此时时间偏移、时间漂移以及通信延迟会被自动计算并补偿。
在 Gazebo 仿真中,GZBridge 会在每个仿真步长(sim step)为 PX4 设置时间Change simulation speed。 需注意,这与 Gazebo Classic所采用的仿真锁步simulation lockstep流程不同。
对于 ROS 2 用户而言,其节点的time source有两种选择。
ROS2 节点使用操作系统时钟作为时间源
本文档以及offboard_control指南中所采用的便是此场景,同时,该场景也是 ROS 2 节点的标准行为 操作系统时钟作为时间来源,因此它只能在模拟实时系数非常接近时才能使用。 uXRCE-DDS 客户端的时间同步器随后会将 ROS 2 端的操作系统时钟(OS clock)与 PX4 端的 Gazebo 时钟进行桥接同步。 用户不需要进一步操作。
ROS2 节点使用 Gazebo 时钟作为时间源
在这种情况下,ROS2还使用Gazebo`/时钟主题作为时间来源。 若 Gazebo 仿真的实时因子不为 1,或 ROS 2 需直接与 Gazebo 交互,则该方法具有合理性。 在 ROS 2 端,可通过ros_gz代码仓库中的ros_gz_bridge 功能包,实现与 Gazebo 的直接交互。
请使用以下命令,为 PX4 所支持的 ROS 2 和 Gazebo 版本安装正确的 ROS 2/gz 接口功能包(不仅限于桥接功能包)。
功能包安装并完成环境配置后,parameter_bridge节点会提供桥接能力,可用于创建一个单向的/clock桥接。
ros2 run ros_gz_bridge parameter_bridge /clock@rosgraph_msgs/msg/Clock[gz.msgs.Clock此时,必须指示每个 ROS 2 节点使用新桥接的/clock话题作为时间源,而非操作系统时钟(OS clock);要实现这一点,需将(每个节点的)use_sim_time参数设置为true(详见ROS clock and Time design)。
至此,ROS 2 端所需的修改已全部完成。 在 PX4 端,你只需停止 uXRCE-DDS 时间同步功能,将参数UXRCE_DDS_SYNCT设置为false即可。 通过此操作,Gazebo 将成为 ROS 2 和 PX4 两者共同的、唯一的主时间源。
ROS 2 示例应用程序
ROS 2 Listener
[px4_ros_com](https://github.com/PX4/px4_ros_com中的 ROS 2 listener examples repo展示了如何编写 ROS 节点,以监听由 PX4 发布的话题
此处我们以 px4_ros_com/src/examples/listeners 路径下的 sensor_combined_listener.cpp 节点为例,该节点会订阅 SensorCombined 消息。
INFO
Build ROS 2 Workspace 显示如何构建和运行这个例子。
代码首先导入了与 ROS 2 中间件进行交互所需的 C++ 库,以及该节点所订阅的SensorCombined消息对应的头部文件:
#include <rclcpp/rclcpp.hpp>
#include <px4_msgs/msg/sensor_combined.hpp>随后,代码创建了一个 SensorCombinedListener 类,该类继承自通用的 rclcpp::Node 基类。
/**
* @brief Sensor Combined uORB topic data callback
*/
class SensorCombinedListener : public rclcpp::Node
{这会创建一个回调函数,用于处理SensorCombined uORB 消息(当前以微型 XRCE-DDS 消息格式传输)的接收事件;每当接收到该消息时,该函数会输出消息字段的内容
public:
explicit SensorCombinedListener() : Node("sensor_combined_listener")
{
rmw_qos_profile_t qos_profile = rmw_qos_profile_sensor_data;
auto qos = rclcpp::QoS(rclcpp::QoSInitialization(qos_profile.history, 5), qos_profile);
subscription_ = this->create_subscription<px4_msgs::msg::SensorCombined>("/fmu/out/sensor_combined", qos,
[this](const px4_msgs::msg::SensorCombined::UniquePtr msg) {
std::cout << "\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n\n";
std::cout << "RECEIVED SENSOR COMBINED DATA" << std::endl;
std::cout << "=============================" << std::endl;
std::cout << "ts: " << msg->timestamp << std::endl;
std::cout << "gyro_rad[0]: " << msg->gyro_rad[0] << std::endl;
std::cout << "gyro_rad[1]: " << msg->gyro_rad[1] << std::endl;
std::cout << "gyro_rad[2]: " << msg->gyro_rad[2] << std::endl;
std::cout << "gyro_integral_dt: " << msg->gyro_integral_dt << std::endl;
std::cout << "accelerometer_timestamp_relative: " << msg->accelerometer_timestamp_relative << std::endl;
std::cout << "accelerometer_m_s2[0]: " << msg->accelerometer_m_s2[0] << std::endl;
std::cout << "accelerometer_m_s2[1]: " << msg->accelerometer_m_s2[1] << std::endl;
std::cout << "accelerometer_m_s2[2]: " << msg->accelerometer_m_s2[2] << std::endl;
std::cout << "accelerometer_integral_dt: " << msg->accelerometer_integral_dt << std::endl;
});
}INFO
该订阅会基于 rmw_qos_profile_sensor_data 设置一个 QoS 配置文件。 之所以需要这样做,是因为 ROS 2 订阅者的默认 QoS(服务质量)配置文件,与 PX4 发布者的配置文件不兼容。 欲了解更多信息,请参阅:ROS 2 Subscriber QoS Settings,
以下代码行创建了一个发布者,用于向 SensorCombined uORB 话题发布数据;该发布者可与一个或多个兼容的 ROS 2 订阅者匹配,这些订阅者监听的是 fmu/sensor_combined/out ROS 2 话题。
private:
rclcpp::Subscription<px4_msgs::msg::DebugVect>::SharedPtr subscription_;
};
```s
The instantiation of the `SensorCombinedListener` class as a ROS node is done on the `main` function.
```cpp
int main(int argc, char *argv[])
{
std::cout << "Starting sensor_combined listener node..." << std::endl;
setvbuf(stdout, NULL, _IONBF, BUFSIZ);
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<std::chrono::microseconds>());
rclcpp::shutdown();
return 0;
}此特殊示例在launch/sensor_combined_listener.launch.py.有一个相关的启动文件。 这使得它可以通过 ros2 launch 命令启动
ROS 2 发布者
一个 ROS 2 发布者节点会将数据发布到 DDS/RTPS 网络中(进而传递给 PX4 自动驾驶仪)。
以 px4_ros_com/src/advertisers 路径下的 debug_vect_advertiser.cpp(文件)为例,首先我们会导入所需的headers,其中包括 debug_vect msg header。
#include <chrono>
#include <rclcpp/rclcpp.hpp>
#include <px4_msgs/msg/debug_vect.hpp>
using namespace std::chrono_literals;随后,代码创建了一个 DebugVectAdvertiser 类,该类继承自通用的 rclcpp::Node 基类。
class DebugVectAdvertiser : public rclcpp::Node
{这段代码创建了一个用来发送消息的回调函数。 发送消息的回调函数由定时器触发的,每秒钟发送两次消息。
public:
DebugVectAdvertiser() : Node("debug_vect_advertiser") {
publisher_ = this->create_publisher<px4_msgs::msg::DebugVect>("fmu/debug_vect/in", 10);
auto timer_callback =
[this]()->void {
auto debug_vect = px4_msgs::msg::DebugVect();
debug_vect.timestamp = std::chrono::time_point_cast<std::chrono::microseconds>(std::chrono::steady_clock::now()).time_since_epoch().count();
std::string name = "test";
std::copy(name.begin(), name.end(), debug_vect.name.begin());
debug_vect.x = 1.0;
debug_vect.y = 2.0;
debug_vect.z = 3.0;
RCLCPP_INFO(this->get_logger(), "\033[97m Publishing debug_vect: time: %llu x: %f y: %f z: %f \033[0m",
debug_vect.timestamp, debug_vect.x, debug_vect.y, debug_vect.z);
this->publisher_->publish(debug_vect);
};
timer_ = this->create_wall_timer(500ms, timer_callback);
}
private:
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<px4_msgs::msg::DebugVect>::SharedPtr publisher_;
};这段代码在 main 函数中将 DebugVectAdvertiser 类实例化成一个ROS节点。
int main(int argc, char *argv[])
{
std::cout << "Starting debug_vect advertiser node..." << std::endl;
setvbuf(stdout, NULL, _IONBF, BUFSIZ);
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<DebugVectAdvertiser>());
rclcpp::shutdown();
return 0;
}Offboard控制
ROS 2 Offboard control example提供了一个完整的 C++ 参考示例,说明如何使用 PX4 的 offboard control 与 ROS 2。
Python ROS2 offboard examples with PX4 (Jaeyoung-Lim/px4-offboard) 为Python 提供了一个类似的示例,并包含脚本:
offboard_control.py: 使用位置设定值进行离板位置控制的示例- “visualizer.py`:用于可视化载体状态的 Rviz
使用飞行控制器硬件
在飞行控制器上运行的 PX4 号ROS2与在模拟器上运行的 PX4 几乎相同。 唯一的区别是您需要同时启动agent and the client,并设置适合通信频道。
更多信息详见Starting uXRCE-DDS
自定义 uORB 主题
ROS 2需要有用于在 PX4 固件中创建 uXRCE-DDS客户端模块的 _sam_message 定义,以便解释消息。 这些定义存储在 ROS 2 接口包PX4/px4_msgs中,并且会通过CI在 main(主)分支和发布分支上自动同步。 需要注意的是,PX4 源代码中的所有消息均存在于该代码仓库中,但只有在dds_topics.yaml文件中列出的消息,才会作为 ROS 2 话题可用。 因此
如果您正在使用 PX4 的主要版本或发布版本,您可以通过克隆接口包PX4/px4_msgs获得消息定义。
如果您要创建或修改 uORB 消息,必须从 PX4 源代码树中手动更新工作空间中的消息。 一般来说,这意味着您将更新 dds_topics.yaml,克隆接口包。 然后手动同步,将新的/修改的消息定义从 PX4-Autopilot/msg复制到它的
msg文件夹。 假定PX4-Autopilot在你的主目录~中,而px4_msgs则在~/ros2_ws/src/中,命令可能是:shrm ~/ros2_ws/src/px4_msgs/msg/*.msg cp ~/PX4-Autopilot/msg/*.msg ~/ros2_ws/src/px4_msgs/msg/INFO
从技术角度而言,dds_topics.yaml 这个文件完整定义了 PX4 uORB 话题与 ROS 2 消息之间的对应关系。 欲了解更多信息,请参阅uXRCE-DDS > DDS Topics YAML。
:::
Customizing the Namespace
自定义主题和服务命名空间可以在构建时间(更改 dds_topics.yaml)或运行时间(对多载体操作有用):
- 一种可能性是在从命令行启动uxrce_dds_client时使用 "-n" 选项。 这种技术既可用于模拟,也可用于实际机体。
- 在开始模拟前,可以通过设置环境变量
PX4_UXRCE_DDS_NS来提供自定义命名空间 (仅限)
INFO
更改运行时的命名空间将会将所需的命名空间作为一个前缀附加到 dds_topics.yaml 中所有的 "topic " 字段和所有 service servers。 因此,命令如下:
uxrce_dds_client start -n uav_1或
PX4_UXRCE_DDS_NS=uav_1 make px4_sitl gz_x500将在以下命名空间下生成话题:
/uav_1/fmu/in/ # for subscribers
/uav_1/fmu/out/ # for publishersPX4 ROS 2 Service Servers
PX4 v1.15PX4 uXRCE-DDS middleware supports ROS 2 services. 服务(Services)是一种远程过程调用(remote procedure calls),由一个节点发起,向另一个节点请求调用,最终会返回一个结果。
A service server is the entity that will accept a remote procedure request, perform some computation on it, and return the result. They simplify communication between ROS 2 nodes and PX4 by grouping the request and response behaviour, and ensuring that replies are only returned to the specific requesting user. 这比发布请求、订阅回复并过滤掉所有不需要的响应要容易得多。
构建在 PX4 uxrce_dds_client 模块中的服务服务器包括:
/fmu/vehicle_command(definition:px4_msgs::srv::VehicleCommand.)此服务可以被 ROS 2 应用程序调用来发送 PX4VehicleCommand uORB 消息,并相应接收 PX4 VehicleCommandAckuORB 消息。
所有 PX4 服务名称均遵循 {extra_namespace}/fmu/{server_specific_name} 这一约定,其中 {extra_namespace} 与可分配给 PX4 话题的 custom namespace相同。
具体细节和示例将在以下章节中提供。
载体指挥服务
这可用于向飞行器发送指令(例如 “起飞”“着陆”“切换模式” 和 “盘旋”),并接收响应。
服务类型在 px4_msgs::srv::VehicleCommand 中定义如下:
VehicleCommand request
---
VehicleCommandAck reply用户可通过发送 VehicleCommand消息发起服务请求,并会收到一条VehicleCommandAck 消息作为响应。 该服务可确保仅将针对用户发起的特定请求所生成的 VehicleCommandAck回复返回。
载体指挥服务离板控制示例
在 px4_ros_com 功能包中,有一个offboard_control_srv 节点,该节点提供了一个完整的、使用 VehicleCommand 服务实现离板控制的示例。
该示例与ROS 2 Offboard Control Example 中描述的离板控制示例高度相似,但使用 VehicleCommand 服务来请求模式切换、飞行器上锁和飞行器解锁。
首先,ROS 2 应用程序会使用 rclcpp::Client() 声明一个类型为 px4_msgs::srv::VehicleCommand 的服务客户端,具体如下(所有 ROS 2 服务客户端均采用此方法)
rclcpp::Client<0>::SharedPtr vehicle_command_client_;然后客户端初始化到正确的 ROS 2 服务 (/fmu/vehicle_command )。 当应用程序假设使用标准的 PX4 命名空间时,这样做的代码看起来就像这样:
vehicle_command_client_{this->create_client<px4_msgs::srv::VehicleCommand>("/fmu/vehicle_command")}此后,客户可以用来发送任何机体命令请求。 例如,arm()函数用于请求机体放置:
void OffboardControl::arm()
{
RCLCPP_INFO(this->get_logger(), "requesting arm");
request_vehicle_command(VehicleCommand::VEHICLE_CMD_COMPONENT_ARM_DISARM, 1.0);
}request_vehicle_command处理请求格式化并在_asynchronous_ mode:
void OffboardControl::request_vehicle_command(uint16_t command, float param1, float param2)
{
auto request = std::make_shared<px4_msgs::srv::VehicleCommand>();
VehicleCommand msg{};
msg.param1 = param1;
msg.param2 = param2;
msg.command = command;
msg.target_system = 1;
msg.target_component = 1;
msg.source_system = 1;
msg.source_component = 1;
msg.from_external = true;
msg.timestamp = this->get_clock()->now().nanoseconds() / 1000;
request->request = msg;
service_done_ = false;
auto result = vehicle_command_client_->async_send_request(request, std::bind(&OffboardControl::response_callback, this,
std::placeholders::_1));
RCLCPP_INFO(this->get_logger(), "Command send");
}最终,响应由 response_callback 方法以异步方式捕获,该方法会检查请求结果:
void OffboardControl::response_callback(
rclcpp::Client<0>::SharedFuture future) {
auto status = future.wait_for(1s);
if (status == std::future_status::ready) {
auto reply = future.get()->reply;
service_result_ = reply.result;
// make decision based on service_result_
service_done_ = true;
} else {
RCLCPP_INFO(this->get_logger(), "Service In-Progress...");
}
}ros2 CLI
ros2 CLI是一个有用的工具来处理ROS。 例如,您可以使用它快速检查话题是否正在发布;如果您的工作空间中包含 px4_msg,还可以详细查看这些话题的内容。 该命令还允许您通过启动文件(launch file)启动更复杂的 ROS 系统。 下文显示了几种可能性。
ros2 topic list(ROS 2 话题列表命令)
使用 ros2 topic list 命令列出 ROS 2 可识别的话题:
ros2 topic list(ROS 2 话题列表命令)若 PX4 已连接至代理,输出结果将是一份话题类型列表:
/fmu/in/obstacle_distance
/fmu/in/offboard_control_mode
/fmu/in/onboard_computer_status
...请注意,工作区不需要使用 px4_msgs 构建才能成功;主题类型信息是消息有效载荷的一部分。
ros2 topic echo
使用 ros2 topic echo"来显示特定主题的详细信息。
与 ros2 topic list 命令不同,要让该功能正常工作,你必须处于一个已编译 px4_msgs且已执行 local_setup.bash 脚本的工作空间中,这样 ROS 才能解析相关消息
ros2 topic echo /fmu/out/vehicle_status该命令将在主题细节更新时响应它们的详细信息。
---
timestamp: 1675931593364359
armed_time: 0
takeoff_time: 0
arming_state: 1
latest_arming_reason: 0
latest_disarming_reason: 0
nav_state_timestamp: 3296000
nav_state_user_intention: 4
nav_state: 4
failure_detector_status: 0
hil_state: 0
...
---ros2 topic hz
你可以使用 ros2 topic hz 命令获取消息速率相关的统计信息。 例如,获取SensorCombined速率:
ros2 topic hz /fmu/out/sensor_combined输出会看起来像这样:
average rate: 248.187
min: 0.000s max: 0.012s std dev: 0.00147s window: 2724
average rate: 248.006
min: 0.000s max: 0.012s std dev: 0.00147s window: 2972
average rate: 247.330
min: 0.000s max: 0.012s std dev: 0.00148s window: 3212
average rate: 247.497
min: 0.000s max: 0.012s std dev: 0.00149s window: 3464
average rate: 247.458
min: 0.000s max: 0.012s std dev: 0.00149s window: 3712
average rate: 247.485
min: 0.000s max: 0.012s std dev: 0.00148s window: 3960ros2 launch
ros2 launch 命令用于启动一个 ROS 2 启动文件 例如,前面我们使用 ros2 launch px4_ros_com sensor_combined_listener.launch.py 命令启动了监听器示例。
你并非必须使用启动文件,但如果你的 ROS 2 系统较为复杂,需要启动多个组件,那么启动文件会非常实用。
关于启动文件的信息,请参阅 ROS 2 Tutorials > Creating launch files
故障处理
缺少依赖项
标准安装应包含 ROS 2 所需的所有工具。
如果有任何缺失,可以单独添加:
colcon构建工具应该在开发工具中。 可以使用以下方式安装它:shsudo apt install python3-colcon-common-extensions变换库(transforms library)所使用的 Eigen3 库,应同时存在于桌面版(desktop)功能包和基础版(base)功能包中。 它应该安装在显示中:
:::
::::
ros_gz_bridge not publishing on the \clock topic
如果你的ROS2 nodes use the Gazebo clock as time source 但ros_gz_bridge 节点没有发布任何关于`/时钟' 主题的内容。 您可能安装了错误的版本。 若你在安装 ROS 2 Humble 时,使用的是默认的 “Ignition Fortress” 功能包,而非 PX4 所使用的、适配 “Gazebo Harmonic” 的功能包,就可能出现这种情况。
以下命令会卸载默认的 Ignition Fortress 功能包,并为搭配 ROS 2 Humble 版本的 Gazebo Harmonic 安装正确的桥接功能包及其他接口功能包:
# Remove the wrong version (for Ignition Fortress)
sudo apt remove ros-humble-ros-gz
# Install the version for Gazebo Garden
sudo apt install ros-humble-ros-gzharmonic更多信息
- ROS 2 in PX4: Technical Details of a Seamless Transition to XRCE-DDS - Pablo Garrido & Nuno Marques (youtube)
- DDS and ROS middleware implementations