Offboard控制
WARNING
Offboard control is dangerous. 这是通过 Mavlink 协议完成的, 特别是 SET_POSITION_TARGET_LOCAL_NED 和 SET_ATTITUDE_TARGET 消息。
Offboard控制背后的想法是能够使用在自动驾驶仪外运行的软件来控制 PX4 飞控。 This is done through the MAVLink protocol, specifically the SET_POSITION_TARGET_LOCAL_NED and the SET_ATTITUDE_TARGET messages.
Offboard控制固件设置
在进行Offboard开发前,您需要在固件端做两个设置。
Enable Stick Override
In QGroundControl the MAN_OVERRIDE_SPD parameter controls automatically switching from offboard (or autonomous) mode to Position mode when the remote sticks are moved. This is enabled by default; set it to -1 to disable. This is the best way to ensure that an operator can easily take control of the vehicle and switch to the safest flight mode.
1. 将遥控开关映射到离板模式激活
In QGroundControl you can set the RC_MAP_OFFB_SW parameter to the RC channel that will be used to activate offboard mode. This can be used to switch between offboard mode and the mode set by the mode switch (RC_MAP_MODE_SW). You can also switch into offboard mode using a GCS/MAVLink so this is not "mandatory".
Note also that this mechanism is not as "safe" as using stick Override to switch out of offboard mode, because the mode you switch to is unpredictable.
2. 启用机载计算机接口
Enable MAVLink on the serial port that you connect to the companion computer (see Companion Computers).
硬件设置
通常,有三种方式设置Offboard模式通信。
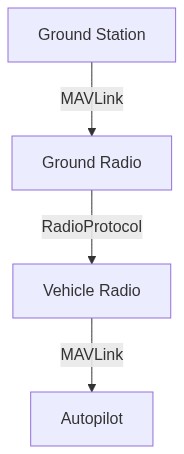
串口电台
一端连接飞控的 UART
一端连接地面站电脑
参考电台包括:
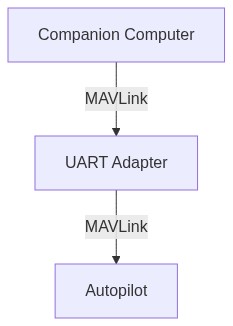
板载处理器
A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ethernet port. 这里有许多可能性,这将取决于您除了向自驾仪发送指令外,还想要做什么样的额外机载处理。 Some examples are provided in Companion Computers.
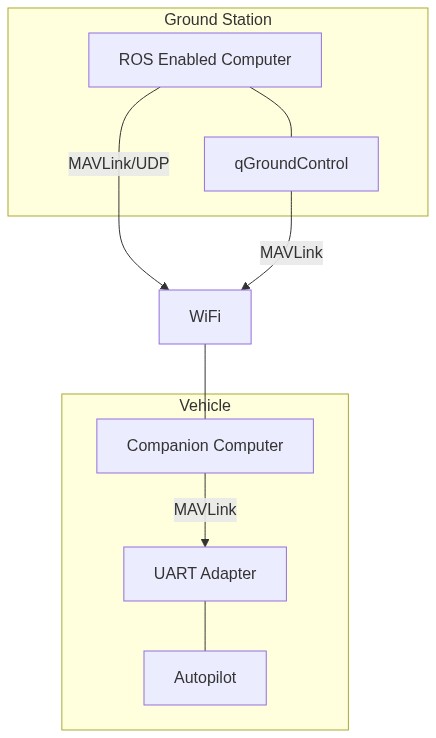
On-board processor and wifi link to ROS (Recommended)
部署在飞行器上的小型计算机除了通过 UART - USB 适配器连接到自动驾驶仪外,同时还可通过WiFi连接至运行 ROS 的地面站。 这可以是上述配备了WiFi适配器的任一计算机。