返航模式
")
The Return flight mode is used to fly a vehicle to safety on an unobstructed path to a safe destination, where it should land.
PX4 提供了几种机制来选择安全的返航路径,返航目的地和着陆,包括使用其实位置,集结(“安全”)点,任务路径和任务着陆顺序。
INFO
- Mode is automatic - no user intervention is required to control the vehicle.
- Mode requires a global 3d position estimate (from GPS or inferred from a local position).
- Flying vehicles can't switch to this mode without global position.
- Flying vehicles will failsafe if they lose the position estimate.
- Mode requires home position is set.
- Mode prevents arming (vehicle cannot be armed while this mode is selected).
- RC switches can be used to change flight modes on any vehicle.
- Stick movement in a multicopter (or VTOL in hover) will by default change the vehicle to Position mode unless prevented by the active failsafe state.
- A VTOL will return as MC or FW based on its mode at the point the return mode was triggered. In MC mode it will respect multicopter parameters, such as the landing "cone". In FW mode it will respect fixed-wing parameters (ignore the cone), but unless using a mission landing, will transition to MC mode and land at the destination after loitering at the descent altitude.
综述
PX4 provides several mechanisms for choosing a safe return path, destination and landing, including using home location, rally ("safe") points, mission paths, and landing sequences defined in a mission.
All vehicles nominally support all of these mechanisms, but not all of them make as much sense for particular vehicles. For example, a multicopter can land virtually anywhere, so it doesn't make sense for it to use a landing sequence except in rare cases. Similarly, a fixed-wing vehicle needs to fly a safe landing path: it can use the home location as a return point, but it won't try and land on it by default.
This topic covers all the possible return types that any vehicle might be configured to use — the vehicle-specific return mode topics cover the default/recommended return type and configuration for each vehicle.
The following sections explain how to configure the return type, minimum return altitude and landing/arrival behaviour.
Return Types (RTL_TYPE)
PX4 provides four alternative approaches for finding an unobstructed path to a safe destination and/or landing, which are set using the RTL_TYPE parameter.
At high level these are:
- Home/rally point return (
RTL_TYPE=0): Ascend to safe altitude and return via a direct path to the closest rally point or home location. - Mission landing/rally point return (
RTL_TYPE=1): Ascend to a safe altitude, fly direct to the closest destination other than home: rally point or start of mission landing. 如果未定义任务着陆点或集结点,请通过直接路径返回起始位置。 - Mission path return (
RTL_TYPE=2): Use mission path and fast-continue to mission landing (if defined). If no mission landing defined, fast-reverse mission to home. If no mission defined, return direct to home (rally points are ignored). - Closest safe destination return (
RTL_TYPE=3): Ascend to a safe altitude and return via direct path to closest destination: home, start of mission landing pattern, or rally point. 如果目的地是飞行任务着陆模式,则按照该模式降落。
以下各节提供了每种类型的更详细说明。
Home/Rally Point Return Type (RTL_TYPE=0)
This is the default return type for a multicopter (see topic for more information).
无人机在该返航类型中:
- Ascends to a safe minimum return altitude (above any expected obstacles).
- Flies to the home position or a rally point (whichever is closest), preferring a geofence-aware horizontal path over a direct path where possible.
- On arrival descends to "descent altitude" and waits for a configurable time. This time may be used to deploy landing gear.
- Lands or waits (this depends on landing parameters), By default an MC or VTOL in MC mode will land and a fixed-wing vehicle circles at the descent altitude. A VTOL in FW mode aligns its heading to the destination point, transitions to MC mode, and then lands.
INFO
If no rally points are defined, this is the same as a Return to Launch (RTL)/Return to Home (RTH).
Mission Landing/Rally Point Return Type (RTL_TYPE=1)
This is the default return type for a fixed-wing or VTOL vehicle (see topics for more information).
无人机在该返航类型中:
Ascends to a safe minimum return altitude (above any expected obstacles) if needed. The vehicle maintains its initial altitude if that is higher than the minimum return altitude.
Flies at constant-altitude to a rally point or the start of a mission landing pattern (whichever is closest), preferring a geofence-aware horizontal path over a direct path where possible. 如果未定义任务降落或集结点,无人机通过直接路径返回到起始位置。
如果目的地是飞行任务着陆模式,则按照该模式降落。
If the destination is a rally point or home it will land or wait at descent altitude (depending on landing parameters). By default an MC or VTOL in MC mode will land, and a fixed-wing vehicle circles at the descent altitude.
A VTOL in FW mode can first fly a VTOL approach loiter associated with that destination. A VTOL approach loiter is a MAV_CMD_NAV_LOITER_TO_ALT item that the vehicle uses to descend to the approach altitude. For upload details, see VTOL Fixed-wing Mode Return. If several approach loiters are defined for the destination, PX4 chooses the most wind-aligned one. It then flies from the approach loiter to the destination point, transitions to MC mode at the destination, and lands.
INFO
Fixed wing vehicles commonly also set MIS_TKO_LAND_REQ to require a mission landing pattern.
Mission Path Return Type (RTL_TYPE=2)
This return type uses the mission (if defined) to provide a safe return path, and the mission landing pattern (if defined) to provide landing behaviour. If there is a mission but no mission landing pattern, the mission is flown in reverse. 集结点,如果有的话,将被忽略。
INFO
The behaviour is fairly complex because it depends on the flight mode, and whether a mission and mission landing are defined.
WARNING
This return type does have geofence awareness (at any stage).
Mission with landing pattern:
- Mission mode:
- Mission is continued in "fast-forward mode" and then lands.
- DO_JUMP commands, delays and other non-position mission items are ignored, and loiter and other position waypoints are converted to simple waypoints.
- Mission is continued in "fast-forward mode" and then lands.
- Auto mode other than mission mode:
- Ascend to a safe minimum return altitude above any expected obstacles.
- 直接飞到最近的航点(对固定翼而言,不是着陆航点),然后降落到航点高度。
- Continue mission in fast forward mode from that waypoint, using the same traversal rules as above.
- Manual modes:
- Ascend to a safe minimum return altitude above any expected obstacles.
- 直接飞到降落序列位置并下降到航点高度。
- 使用任务降落模式着陆。
Mission without landing pattern defined:
- Mission mode:
- 从上一个航点开始以“快退”(反向)飞行的任务
- DO_JUMP commands, delays and other non-position mission items are ignored, and loiter and other position waypoints are converted to simple waypoints.
- VTOL 无人机在反向飞行任务之前切换到固定翼模式(如果需要)。
- On reaching waypoint 1, the vehicle ascends to the minimum return altitude and flies to the home position (where it lands or waits).
- 从上一个航点开始以“快退”(反向)飞行的任务
- Auto mode other than mission mode:
- 直接飞到最近的航点(对固定翼而言,不是着陆航点),然后降落到航点高度。
- 反向执行任务,就像在任务模式中触发返航模式一样(上图)。
- Manual modes: Fly directly to home location and land.
如果未定义任务,PX4 将直接飞回起始位置并着陆(集结点将被忽略)。
如果任务在返航模式期间发生更改,则将按照与上述相同的规则根据新任务重新评估行为(例如,如果新任务没有降落顺序并且你在一个任务中,则任务将被逆转)。
INFO
For RTL_TYPE=4, PX4 currently chooses between continuing to a mission landing and reversing toward home by comparing raw mission item indices. This is only an approximation of the flown path length, because the number if mission items is not indicative of the distance remaining and non-position items are also counted.
Closest Safe Destination Return Type (RTL_TYPE=3)
无人机在该返航类型中:
- Ascends to a safe minimum return altitude (above any expected obstacles).
- 飞到最近目的地的直接路径:起始位置,任务着陆模式或集结点。
- If the destination is a mission landing pattern the vehicle will follow the pattern to land.
- If the destination is a home location or rally point, the vehicle will descend to the descent altitude (RTL_DESCEND_ALT) and then lands or waits. By default an MC or VTOL in MC mode will land, and a fixed-wing vehicle circles at the descent altitude. A VTOL in FW mode aligns its heading to the destination point, transitions to MC mode, and then lands.
Geofence Awareness
For most of the return types (including the default home/rally point return type) the return path is chosen to avoid breaching any geofence. Planning is purely horizontal: the altitude profile is unaffected, and only the lateral path is adjusted to avoid the fence. If no geofence is set, the vehicle flies a direct path to the destination.
While the return mode is inactive, the autopilot constantly recalculates a shortest horizontal return path that does not enter any exclusion zones and does not exit any inclusion zones.
If the return mode is triggered while the vehicle is violating any geofence, then the vehicle will first fly directly to the most recent recorded location at which it was not violating the geofence. If no such point exists, or if the autopilot fails to plan a feasible path (e.g. the destination is located in an exclusion zone), then the vehicle falls back to flying directly to the destination.
INFO
The estimated time for return is based on the current shortest horizontal path to the destination and may change if the geofence is updated.
WARNING
Geofence awareness currently supports a maximum of 99 polygon vertices in total (circles count as 8 vertices each). If this limit is exceeded, the autopilot falls back to a direct path as described above.
WARNING
There is no absolute guarantee that the vehicle will not breach a geofence on the return path. Things like path tracking error, wind and other disturbances may cause temporary violation of the geofence. It is therefore very important to consider this possibility and especially to review the geofence breach action (e.g. GF_ACTION).
RTL-types with Geofence-Awareness
The following table shows which return types currently support geofence awareness:
| Return Type (RTL_TYPE) | Geofence Awareness |
|---|---|
| 0 (home/rally point) | Yes |
| 1 (mission landing) | Yes |
| 2 (mission path) | No |
| 3 (closest safe dest.) | Yes |
| 4 (mission path) | No |
| 5 (rally point only) | Yes |
Shortest-Path Calculation
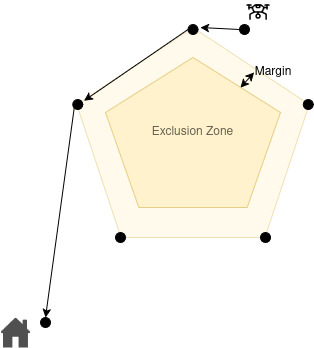
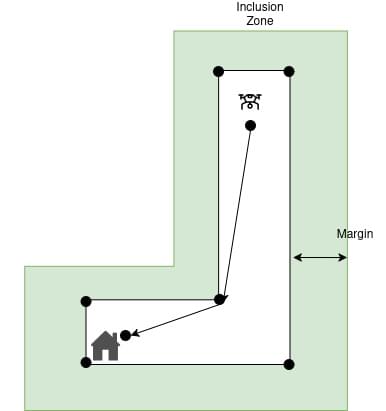
For the construction of the shortest path between the starting location and the destination, the autopilot uses the vertices of the geofence polygons as intermediate waypoints. In order to avoid the path being too close to the polygon boundaries, the autopilot constructs a corresponding set of polygons, which are either enlarged (for exclusion zones) or shrunk (for inclusion zones). The margin in both images below is 10m. The figures below show an exclusion zone and an inclusion zone.
悬停/降落在目的地
For most return types a vehicle will ascend to a minimum safe altitude before returning (unless already above that altitude), in order to avoid any obstacles between it and the destination.
INFO
The exception is when executing a mission path return from within a mission. In this case the vehicle follows mission waypoints, which we assume are planned to avoid any obstacles.
The return altitude for a fixed-wing vehicle or a VTOL in fixed-wing mode is configured using the parameter RTL_RETURN_ALT (does not use the code described in the next paragraph).
The return altitude for a multicopter (or VTOL vehicle in MC mode) is configured using the parameters RTL_RETURN_ALT, RTL_CONE_ANG, and RTL_MIN_DIST, which together define a half cone centered around the destination (home location or safety point).
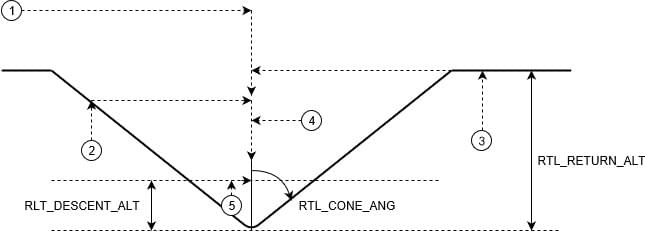
如果无人机是:
- Above RTL_RETURN_ALT (1) it will return at its current altitude.
- Outside of the radius defined RTL_MIN_DIST (3) it will first climb until it reaches RTL_RETURN_ALT.
- Below the cone and within RTL_MIN_DIST it will climb to return at the cone intersection altitude (2), up to RTL_RETURN_ALT.
- Inside the cone (4, 5) it will return at its current altitude.
注意:
- If RTL_CONE_ANG is 0 degrees there is no "cone":
- the vehicle returns at
RTL_RETURN_ALT(or above).
- the vehicle returns at
- If RTL_CONE_ANG is 90 degrees the vehicle will generally return at its current altitude when close to the destination. The return altitude may still be constrained to avoid flying too low while approaching the destination.
无人机默认行为
Unless executing a mission landing pattern as part of the return mode, the vehicle will arrive at its destination, and rapidly descend to the RTL_DESCEND_ALT altitude (if above that altitude), where it will loiter for RTL_LAND_DELAY before landing. If RTL_LAND_DELAY=-1 it will loiter indefinitely.
The default landing configuration is vehicle dependent:
- 如果定义了任务降落,直接飞往任务降落起点,然后着陆。
- Fixed-wing vehicles use a return mode with a mission landing pattern, as this enables automated landing. If not using a mission landing, the default configuration is to loiter indefinitely, so the user can take over and manually land.
- VTOLs in MC mode fly and land exactly as a multicopter.
- VTOLs in FW mode head towards the landing point, transition to MC mode, and then land on the destination. If a VTOL approach loiter is defined for a rally point or home location, the vehicle uses that loiter to reach the approach altitude, then flies to the destination before back-transitioning.
Mission Landing Pattern
A mission landing pattern is a landing pattern defined as part of a mission plan. This consists of a MAV_CMD_DO_LAND_START, one or more position waypoints, and a MAV_CMD_NAV_LAND (or MAV_CMD_NAV_VTOL_LAND for a VTOL Vehicle).
Landing patterns defined in missions are the safest way to automatically land a fixed-wing vehicle on PX4. For this reason fixed-wing vehicles are configured to use Mission landing/really point return by default.
参数
The RTL parameters are listed in Parameter Reference > Return Mode (and summarised below).
| Parameter | 描述 |
|---|---|
| RTL_TYPE | Return mechanism (path and destination).0: Return to a rally point or home (whichever is closest) via direct path.1: Return to a rally point or the mission landing pattern start point (whichever is closest), via direct path. 如果未定义任务着陆点或集结点,通过直接路径返回起始位置。 If the destination is a mission landing pattern, follow the pattern to land.2: Use the mission path to landing while skipping DO_JUMP and other non-position mission items if a landing pattern is defined, otherwise fast-reverse to home with the same traversal rules. 忽略集结点。 Fly direct to home if no mission plan is defined.3: Return via direct path to closest destination: home, start of mission landing pattern or safe point. 如果目的地是飞行任务着陆模式,则按照该模式降落。 |
| RTL_RETURN_ALT | Return altitude in meters (default: 60m) when RTL_CONE_ANG is 0. 如果已经超过这个值, 飞机将返回当前的高度。 |
| RTL_DESCEND_ALT | Altitude above the destination used for the final descent before landing or loitering (default: 30m). |
| RTL_LAND_DELAY | Time to wait at RTL_DESCEND_ALT before landing (default: 0.5s) - by default this period is short so that the vehicle will simply slow and then land immediately. If set to -1 the system will loiter at RTL_DESCEND_ALT rather than landing. 延迟能够使你为起落架的展开部署配置时间(自动触发)。 |
| RTL_MIN_DIST | Within this distance from the return destination, the return altitude is calculated from the "cone" rather than directly from RTL_RETURN_ALT. |
| RTL_CONE_ANG | 圆锥半角决定无人机的 RTL 返航高度。 Values (in degrees): 0, 25, 45, 65, 80, 90. Note that 0 is "no cone" (always return at RTL_RETURN_ALT or higher), while 90 indicates an almost vertical cone, so the vehicle generally returns at its current altitude when close to the destination. The return altitude may still be constrained to avoid flying too low while approaching the destination. |
| RTL_APPR_FORCE | [VTOL FW only] If set, home or rally-point RTL destinations are only considered when a valid VTOL approach loiter is defined for that landing location. Mission landing patterns are unaffected. |
| MAN_OVERRIDE_SPD | Speed (normalized stick travel per second) above which moving the sticks controlling a multicopter (or VTOL in hover) gives control back to the pilot by switching to Position mode (or Altitude mode if position is unavailable). At the default 1 a half-stick movement in ~0.5 s triggers it; lower is more sensitive. A stick held statically has zero speed and will not trigger. Set to -1 to disable. PX4 v1.18 |
| RTL_LOITER_RAD | [Fixed-wing Only] The radius of the loiter circle (at RTL_LAND_DELAY). |
| MIS_TKO_LAND_REQ | Specify whether a mission landing or takeoff pattern is required. Generally fixed-wing vehicles set this to require a landing pattern but VTOL do not. |