飞行终止配置
The Flight termination failsafe action irreversibly turns off controllers and sets PWM values to their parameter configured failsafe values.
INFO
Flight termination differs from the Kill action in that it is permanent until after reboot.
WARNING
This is not an independent Flight Termination System. 如果断电或者自驾仪完全失控,失效保护设备则不会触发。
综述
Termination Triggers
Termination may be triggered by:
- Safety checks for RC Loss, geofence violation, and so on (on any vehicle type or in any flight mode).
- Failure Detector trigger
- RC termination switch (mapped to an RC channel using RC_MAP_TERM_SW).
- The MAVLink MAV_CMD_DO_FLIGHTTERMINATION MAVLink command from a GCS or companion computer (see MAVLink Trigger below).
飞行终止是无法取消的。 在飞行终止触发后,您应尽快拔下电池。 您需要在重启载具或重新上电后才能再次使用。
Termination Actions
When Flight termination is activated, PX4 simultaneously turns off all controllers and sets all PWM outputs to their failsafe values.
根据所连接的设备,PWM 故障保护输出可以用来完成以下动作:
- Deploy a parachute.
- 伸展可伸缩起落架。
- 将连接了 PWM 的云台移动到安全的方向(或将它回收)以保护摄像机。
- 触发一个可充气的装置,如安全气囊。
- 触发警报。
TIP
PX4 does not know what safety devices are attached - it just applies a predefined set of PWM values to its outputs.
TIP
Failsafe values are applied to all outputs on termination. 无法配置电机或特定安全装置为独立的特定时间(或其他方式)触发。
硬件配置
Any safety device(s) (e.g. a parachute) that can be triggered by changing a PWM value can be used, and may be connected to any free PWM port (both MAIN and AUX).
INFO
If you're using Pixhawk-series board you will have to separately power the servo rail (i.e. from a 5V BEC, which is often also available from your ESC).
软件配置
The Safety topic explains how to set the flight termination as the failsafe action to be performed for particular failsafe check.
The Failure Detector can also (optionally) be configured to trigger flight termination if the vehicle flips (exceeds a certain attitude) or if failure is detected by an external automatic trigger system (ATS):
- Enable the failure detector during flight by setting CBRK_FLIGHTTERM=0.
- Safety > Failure Detector > Attitude Trigger explains how to configure the attitude limits that trigger Flight termination.
INFO
During takeoff excessive attitutes will trigger lockdown (kill motors, but not launch parachute) rather than flight termination. This is always enabled, irrespective of the value of
CBRK_FLIGHTTERM.
:::
- Safety > External Automatic Trigger System (ATS) explains how to configure an external trigger system.
对于每个与安全装置相连的 MAIN 输出,其中“n”指 PWM 端口号,设置:
- PWM_MAIN_DISn to the device's "OFF" PWM value.
- PWM_MAIN_FAILn to the device's "ON" PWM value.
对于每个与安全装置相连的 AUX 输出,其中“n”指 PWM 端口号,设置:
- PWM_AUX_DIS1 to the device's "OFF" PWM value.
- PWM_AUX_FAILn to the device's "ON" PWM value.
Finally, set the PWM_AUX_FAILn and PWM_MAIN_FAILn PWM values for any motors.
INFO
Flight termination via ATS only works if drivers/pwm_input is included in the firmware for your board. If not, you need to add it manually to your board configuration using boardconfig.
MAVLink Trigger
The MAV_CMD_DO_FLIGHTTERMINATION command can be used to trigger Flight termination from a ground station or companion computer.
This is sent, for example, when you call the MAVSDK Action plugin terminate() or terminate_async() methods.
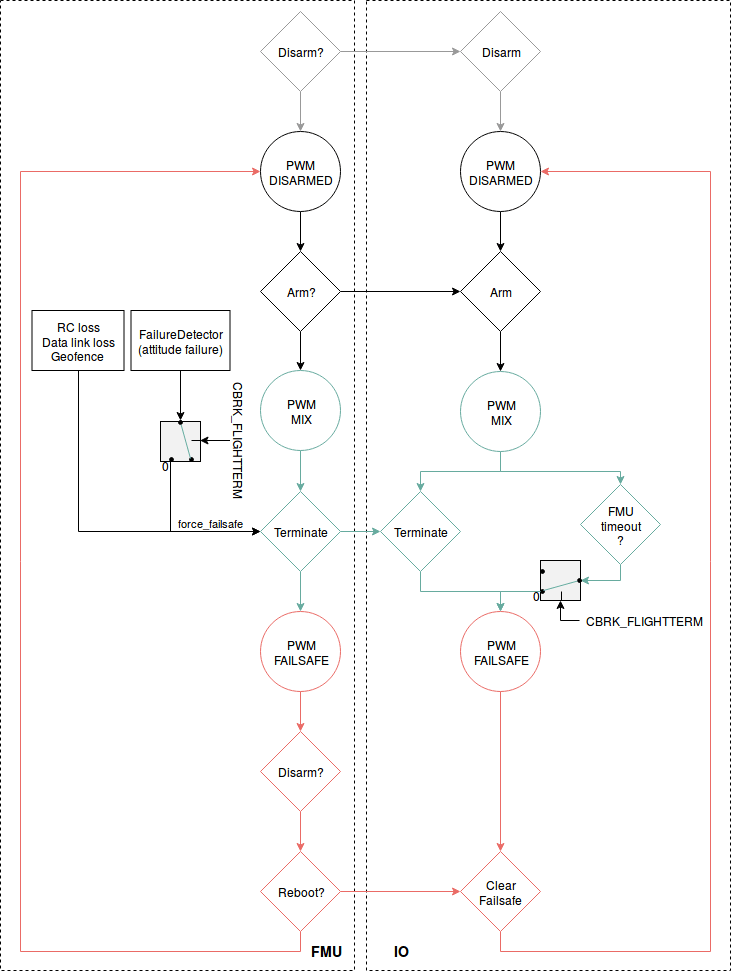
逻辑图解
下图显示了飞行终止的逻辑流程。