QGroundControl Flight-Readiness Status
PX4 performs a number of preflight sensor quality and estimator checks to determine if, for example, there is a good enough position estimate to fly the vehicle in the current mode, and will block arming if the vehicle is not ready.
QGroundControl can be used to determine whether the vehicle is ready to fly, and more importantly what checks are failing.
TIP
You can also get readiness notifications from the vehicle status LEDs and warning tunes. However QGC is the only way to determine the precise reasons why PX4 will not arm.
Flight Readiness Status
The overall "readiness to fly" is displayed in QGroundControl in the top left corner near the Q menu icon, as shown below:
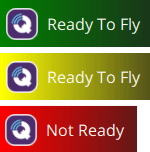
The three states are:
- "Ready to Fly" (Green background): The vehicle is ready to fly in all modes, and can be armed.
- "Ready to Fly" (Amber background): The vehicle is ready to fly in the current mode and can be armed, but some check is failing that means it will not be able to switch to some other mode.
- "Not Ready" (Amber background): The vehicle is not ready to fly in the current mode, and cannot be armed.
QGC Arming Check Report
PX4 v1.14 QGC v4.2.0You can find out what prearming checks are failing using the QGroundControl Arming Check Report in Fly View. To access this UI select the Flight Readiness Status indicator in the top left corner of QGroundControl's Fly View.
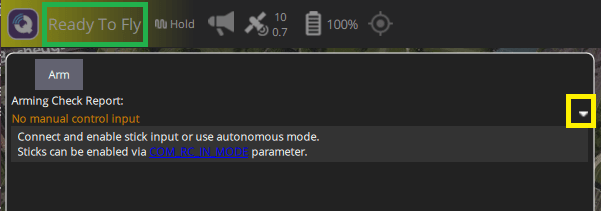
The Arming Check Report will then pop up and list all current warnings, with a toggle on the right of each warning that expands each entry with additional information and possible solutions.
Once each issue is resolved it will disappear from the UI. When all issues blocking arming have been removed you can use the arm button to display the arming confirmation slider, and arm the vehicle (or you can just take off).
TIP
The QGC Arming Checks UI is available in the QGC Daily Build (QGC v4.2.0 and later), and works with PX4 v1.14 and later.
Flight Logs
Preflight errors are also reported in QGroundControl as PREFLIGHT FAIL messages. The estimator_status.gps_check_fail_flags message in the logs shows which GPS quality checks are failing.
Note that the Arming Check Report is a much easier way to determine reasons for failure, but the logs may be useful in versions prior to PX4 v1.14.
EKF 飞行前检查 / 错误
This sections lists errors, with associated checks and parameters, that are reported by EKF2 (and propagate to QGroundControl). These are provided for information only (the QGC Arming Checks UI is the best way to get error and solution information).
PREFLIGHT FAIL: EKF HIGH IMU ACCEL BIAS
The EKF IMU acceleration bias is the difference between the measured acceleration reported by the IMU sensor and the expected acceleration reported by the EKF2 estimator (which fuses position and/or velocity data from a number of sources, including the IMU, GNSS, flow sensors etc.). This bias may change when the sensor is turned on ("turn-on bias") and over time due to noise and temperature differences ("in-run bias"). The number should generally be very small (near zero), indicating that measurements from different sources all agree on the acceleration.
The warning indicates that the bias is higher than some arbitrary threshold (the vehicle will not be allowed to take off). It is most likely a sign that accelerometer or thermal calibration are required:
- If you sometimes get the warning: re-calibrate the accelerometer.
- If you get regularly get the warning: Perform a thermal calibration.
- If you still get the warning after thermal calibration (or you can't perform thermal calibration):
- Verify that the issues do not come from the sensor or autopilot hardware:
- The easiest way to do this is to test the same frame/sensors with another autopilot.
- Alternatively, log and compare all accelerometers across a number of bench test runs with
6: Sensor comparisonenabled in SDLOG_PROFILE.
- Attempt to change the accelerometer bias learning tuning parameters.
- Verify that the issues do not come from the sensor or autopilot hardware:
Increasing the parameters will make the autopilot less likely to detect an anomaly and can modify the stability of the estimator. However it may be required if there are problems with the sensor that cannot be fixed by other means (i.e you can tune the EKF for better performance, but there is no way you can calibrate the accelerometer "better").
WARNING
Tuning these parameters is a last resort. It should only be attempted if you have data showing it will improve the performance of the estimator.
| Parameter | 描述 |
|---|---|
| EKF2_ABL_LIM | The maximum bias value that the EKF is allowed to estimate (above this value the bias will be clipped and EKF will attempt to reset itself, possibly even switching to a more healthy EKF with a working IMU in a multi-EKF system). The autopilot will report a "high accel bias" if the estimated bias exceeds 75% of this parameter during a preflight check and prevent takeoff. The current value of 0.4m/s2 is already quite high and increasing it would make the autopilot less likely to detect an issue. |
| EKF2_ABIAS_INIT | Initial bias uncertainty (if perfectly calibrated, this is related to the "turn-on bias" of the sensor). Some users might want to reduce that value if they know that the sensor is well calibrated and that the turn-on bias is small. |
| EKF2_ACC_B_NOISE | The expected "in-run bias" of the accelerometer or "how fast do we expect the bias to change per second". By default, this value is large enough to include the drift due to a temperature change. If the IMU is temperature calibrated, the user might want to reduce this parameter. |
| EKF2_ABL_ACCLIM | The maximum acceleration at which the estimator will try to learn an acceleration bias. This is to prevent the estimator from learning a bias due to non-linearity and scale factor errors. (Almost no user should need to change that parameter except if they really know what they are doing). |
PREFLIGHT FAIL: EKF HIGH IMU GYRO BIAS
- 当由 EKF 估计的 IMU 陀螺仪偏差过大时会产生该错误。
- Excessive in this case means that the bias estimate exceeds 10deg/s (half the configured limit, which is hardcoded to 20deg/s).
PREFLIGHT FAIL: ACCEL SENSORS INCONSISTENT - CHECK CALIBRATION
- 当来自不同 IMU 单元的加速度测量值不一致时,会产生此错误消息。
- 此检查仅适用于具有多个 IMU 的板。
- The check is controlled by the COM_ARM_IMU_ACC parameter.
PREFLIGHT FAIL: GYRO SENSORS INCONSISTENT - CHECK CALIBRATION
- 当来自不同 IMU 单元的角速率测量值不一致时,会产生此错误消息。
- 此检查仅适用于具有多个 IMU 的板。
- The check is controlled by the COM_ARM_IMU_GYR parameter.
PREFLIGHT FAIL: COMPASS SENSORS INCONSISTENT - CHECK CALIBRATION
- This error message is produced when the difference in measurements from different compass sensors is too great.
- It indicates bad calibration, orientation or magnetic interference.
- This check only applies to when more than one compass/magnetometer is connected.
- The check is controlled by the COM_ARM_MAG_ANG parameter.
PREFLIGHT FAIL: EKF INTERNAL CHECKS
- 如果水平 GPS 速度、偏航角、垂直 GPS 速度或者垂直位置传感器(气压计默认情况下可以使测距仪或 GPS ,如果使用非标准参数)其中之一新息过多,会产生此错误消息。 新息指的是惯性导航计算预测值与传感器测量值之间的差异。
- 用户应检查日志文件中新息级别以确定原因。 These can be found under the
ekf2_innovationsmessage. 常见问题 / 解决方案包括:- IMU 启动时漂移。 可以通过重启自驾仪来解决。 可能需要 IMU 加速度计和陀螺仪校准。
- 相邻磁干扰在飞行器运动中。 通过等待或者重新上电解决。
- 磁力计校准不良在飞行器运动中。。 通过重新校准解决。
- 启动时的初始冲击或快速移动导致惯性导航失败。 通过重新启动飞行器并在前 5 秒内最大限度地减少移动来解决此问题。
其他参数
The following parameters also affect preflight checks.
COM_ARM_WO_GPS
The COM_ARM_WO_GPS parameter controls whether or not arming is allowed in modes that require a valid global position estimate when EKF2 GNSS quality checks are failing.
The values are:
0: Deny arming.1: Arming allowed with warning (default). This might be used to provide a warning that the GNSS is unhealthy even when there is another source of valid position estimate, such as VIO or optical flow.2: Arming allowed without warnings.