Offboard Control
WARNING
Offboard control is dangerous. Це відповідальність розробника переконатися в належній підготовці, тестуванні та заходах безпеки перед польотом.
Ідея зовнішнього контролю полягає в можливості керування стеком керування PX4 за допомогою програмного забезпечення, яке виконується поза автопілотом. This is done through the MAVLink protocol, specifically the SET_POSITION_TARGET_LOCAL_NED and the SET_ATTITUDE_TARGET messages.
Налаштування прошивки з зовнішнім контролем
Є дві речі, які ви маєте налаштувати на стороні прошивки перед початком розробки.
Enable Stick Override
In QGroundControl the MAN_OVERRIDE_SPD parameter controls automatically switching from offboard (or autonomous) mode to Position mode when the remote sticks are moved. This is enabled by default; set it to -1 to disable. This is the best way to ensure that an operator can easily take control of the vehicle and switch to the safest flight mode.
Зв'язування RC перемикача з активацією режиму offboard.
In QGroundControl you can set the RC_MAP_OFFB_SW parameter to the RC channel that will be used to activate offboard mode. This can be used to switch between offboard mode and the mode set by the mode switch (RC_MAP_MODE_SW). You can also switch into offboard mode using a GCS/MAVLink so this is not "mandatory".
Note also that this mechanism is not as "safe" as using stick Override to switch out of offboard mode, because the mode you switch to is unpredictable.
Увімкніть інтерфейс комп'ютера-компаньйона
Enable MAVLink on the serial port that you connect to the companion computer (see Companion Computers).
Налаштування обладнання
Зазвичай, є три способи створення offboard з'єднання.
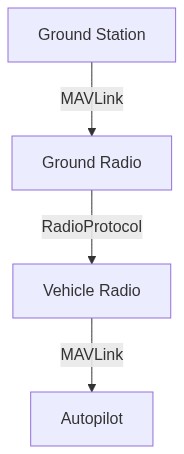
Послідовні радіомодулі
Один підключений до UART порту автопілота
Один підключений до наземної станції
Приклад радіомодулів включає:
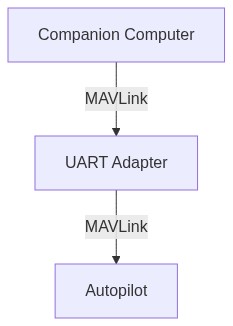
Бортовий процесор
A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ethernet port. Тут багато можливостей і це буде залежати від того, яку додаткову обробку ви хочете виконати на платі, а також від додаткової відправки команд до автопілота. Some examples are provided in Companion Computers.
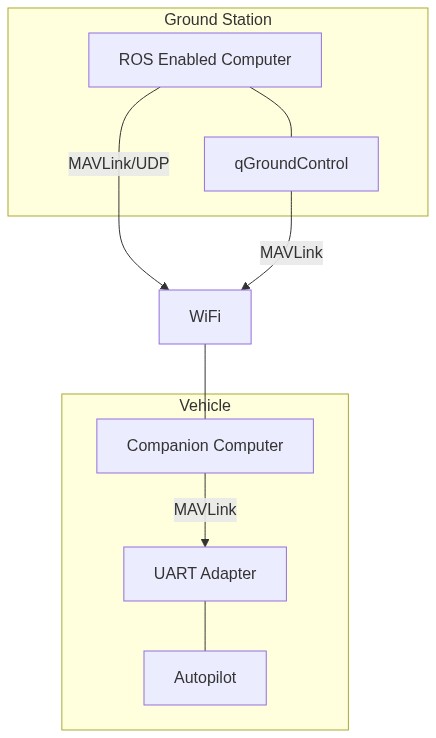
On-board processor and wifi link to ROS (Recommended)
Невеликий комп'ютер, підключений до транспортного засобу, підключений до автопілота через UART до USB-адаптера в той час, як підключений WiFi до наземної станції з запущеним ROS. Це може бути будь-який з комп'ютерів зазначеної секції в поєднанні з Wi-Fi адаптером.