ROS з симулятором Gazebo Classic
ROS (Robot Operating System) can be used with PX4 and the Gazebo Classic simulator. It uses the MAVROS MAVLink node to communicate with PX4.
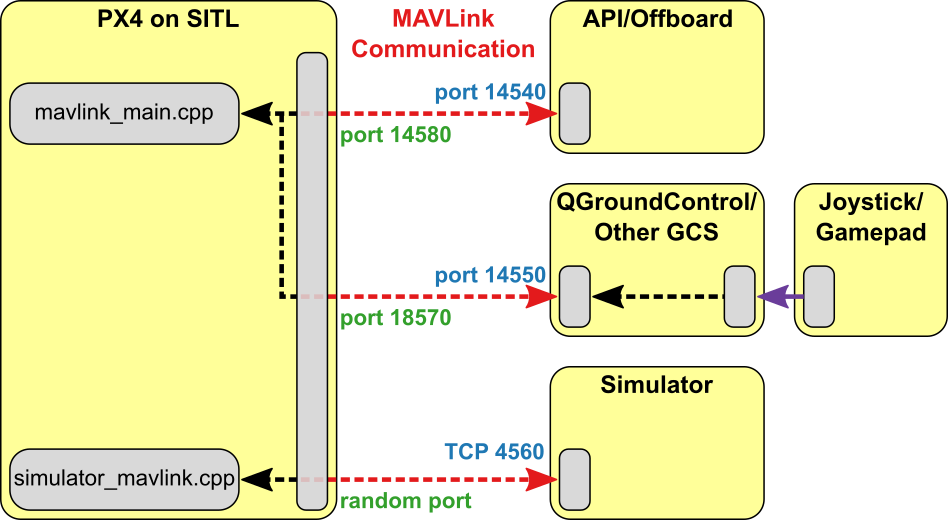
The ROS/Gazebo Classic integration with PX4 follows the pattern in the diagram below (this shows the generic PX4 simulation environment). PX4 спілкується з симулятором (наприклад Gazebo Classic), щоб отримувати дані датчиків із модельованого світу і надсилає значення для двигунів та сервоприводів. Вона спілкується з GCS та зовнішнім API (наприклад ROS) щоб надіслати телеметрію із модельованого середовища та отримати команди.
INFO
The only slight difference to "normal behaviour" is that ROS initiates the connection on port 14557, while it is more typical for an offboard API to listen for connections on UDP port 14540.
Встановлення ROS та Gazebo Classic
ROS (1) with MAVROS Installation Guide explains how to set up a guide for working with ROS (1), MAVROS, and PX4.
INFO
ROS is only supported on Linux (not macOS or Windows).
Запуск ROS/симуляції
The command below can be used to launch the simulation and connect ROS to it via MAVROS, where fcu_url is the IP / port of the computer running the simulation:
roslaunch mavros px4.launch fcu_url:="udp://:14540@192.168.1.36:14557"Для з'єднання з localhost (локальним комп'ютером), використовуйте цей URL:
roslaunch -w 2 -v mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"INFO
It can be useful to call roslaunch with the -w NUM_WORKERS (override number of worker threads) and/or -v (verbose) in order to get warnings about missing dependencies in your setup. Наприклад:
roslaunch -w 2 -v mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"Запуск Gazebo Classic за допомогою обгорток ROS
Симуляція Gazebo Classic може бути змінена для інтеграції публікації даних датчиків напряму в рубрики ROS наприклад ROS плагін лазера для Gazebo Classic. Для підтримки цієї функції, Gazebo Classic повинна бути запущена з відповідною обгорткою ROS.
Доступні скрипти запуску ROS для запуску симуляції в обгортці ROS:
- posix_sitl.launch: plain SITL launch
- mavros_posix_sitl.launch: SITL and MAVROS
Щоб запустити SITL обгорнуту в ROS, необхідно оновити середовище ROS, а потім запустити як завжди:
(необов'язково): виконувати команду source у робочому просторі catkin потрібно тільки якщо ви скомпілювали MAVROS або інші пакети ROS з вихідного коду:
cd <PX4-Autopilot_clone>
DONT_RUN=1 make px4_sitl_default gazebo-classic
source ~/catkin_ws/devel/setup.bash # (optional)
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic
roslaunch px4 posix_sitl.launchВключіть один зі згаданих вище файлів запуску у ваш власний файл запуску для запуску застосунку ROS в симуляції.
Що відбувається за лаштунками
This section shows how the roslaunch instructions provided previously actually work (you can follow them to manually launch the simulation and ROS).
Вам потрібно три термінали, у всіх потрібно запустити команду source у ROS середовищі.
Спочатку запустіть симулятор, використовуючи наступну команду:
cd <PX4-Autopilot_clone>
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
roslaunch px4 px4.launchУ консолі буде приблизно це:
INFO [px4] instance: 0
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] startup script: /bin/sh etc/init.d-posix/rcS 0
INFO [init] found model autostart file as SYS_AUTOSTART=10016
INFO [param] selected parameter default file parameters.bson
INFO [param] importing from 'parameters.bson'
INFO [parameters] BSON document size 295 bytes, decoded 295 bytes (INT32:12, FLOAT:3)
INFO [param] selected parameter backup file parameters_backup.bson
INFO [dataman] data manager file './dataman' size is 7866640 bytes
etc/init.d-posix/rcS: 31: [: Illegal number:
INFO [init] PX4_SIM_HOSTNAME: localhost
INFO [simulator_mavlink] Waiting for simulator to accept connection on TCP port 4560У другому терміналі переконайтесь, що зможете запустити gazebo з файлами світу, визначеними у PX4-Autopilot. To do this set your environment variables to include the appropriate sitl_gazebo-classic folders.
cd <PX4-Autopilot_clone>
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classicТепер запустіть з Gazebo Classic так, як ви хотіли б працювати з ROS:
roslaunch gazebo_ros empty_world.launch world_name:=$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic/worlds/empty.worldУ третьому терміналі переконайтесь що зможете відтворити модель з sdf файлами, визначеними у PX4-Autopilot. To do this set your environment variables to include the appropriate sitl_gazebo-classic folders.
cd <PX4-Autopilot_clone>
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classicТепер додайте модель квадрокоптера Iris так, як ви б хотіли коли працюєте з ROS. Після завантаження Iris автоматично з'єднається із застосунком px4.
rosrun gazebo_ros spawn_model -sdf -file $(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris/iris.sdf -model iris -x 0 -y 0 -z 0 -R 0 -P 0 -Y 0