비행 중단 설정
The Flight termination failsafe action irreversibly turns off controllers and sets PWM values to their parameter configured failsafe values.
INFO
Flight termination differs from the Kill action in that it is permanent until after reboot.
WARNING
This is not an independent Flight Termination System. If power is lost or if the autopilot crashes completely, the failsafe devices will not be triggered.
개요
Termination Triggers
Termination may be triggered by:
- Safety checks for RC Loss, geofence violation, and so on (on any vehicle type or in any flight mode).
- Failure Detector trigger
- RC termination switch (mapped to an RC channel using RC_MAP_TERM_SW).
- The MAVLink MAV_CMD_DO_FLIGHTTERMINATION MAVLink command from a GCS or companion computer (see MAVLink Trigger below).
TIP
PX4는 어떤 안전 장치가 장착되어 있는지 알지 못합니다. 미리 정의된 PWM 값 세트를 출력에 적용하기만 하면 됩니다. After triggering you should unplug the battery as soon as possible. You will need to reboot/power cycle the vehicle before it can be used again.
Termination Actions
When Flight termination is activated, PX4 simultaneously turns off all controllers and sets all PWM outputs to their failsafe values.
Depending on what devices are connected, the PWM failsafe outputs can be used to:
- Deploy a parachute.
- 랜딩기어 펼치기.
- 카메라를 보호하기 위해 PWM방식으로 연결된 짐벌을 안전 각도(또는 수납 위치) 로 움직이기.
- 에어백 같은 팽창 장비 가동하기.
- 알람 울리기.
TIP
PX4 does not know what safety devices are attached - it just applies a predefined set of PWM values to its outputs.
TIP
Failsafe values are applied to all outputs on termination. 전원이 끊기거나 자동조종장치가 완전히 충돌하면 안전 장치가 작동하지 않습니다.
하드웨어 설정
Any safety device(s) (e.g. a parachute) that can be triggered by changing a PWM value can be used, and may be connected to any free PWM port (both MAIN and AUX).
INFO
If you're using Pixhawk-series board you will have to separately power the servo rail (i.e. from a 5V BEC, which is often also available from your ESC).
소프트웨어 설정
The Safety topic explains how to set the flight termination as the failsafe action to be performed for particular failsafe check.
The Failure Detector can also (optionally) be configured to trigger flight termination if the vehicle flips (exceeds a certain attitude) or if failure is detected by an external automatic trigger system (ATS):
- Enable the failure detector during flight by setting CBRK_FLIGHTTERM=0.
- Safety > Failure Detector > Attitude Trigger explains how to configure the attitude limits that trigger Flight termination.
INFO
During takeoff excessive attitutes will trigger lockdown (kill motors, but not launch parachute) rather than flight termination. This is always enabled, irrespective of the value of
CBRK_FLIGHTTERM.
:::
- Safety > External Automatic Trigger System (ATS) explains how to configure an external trigger system.
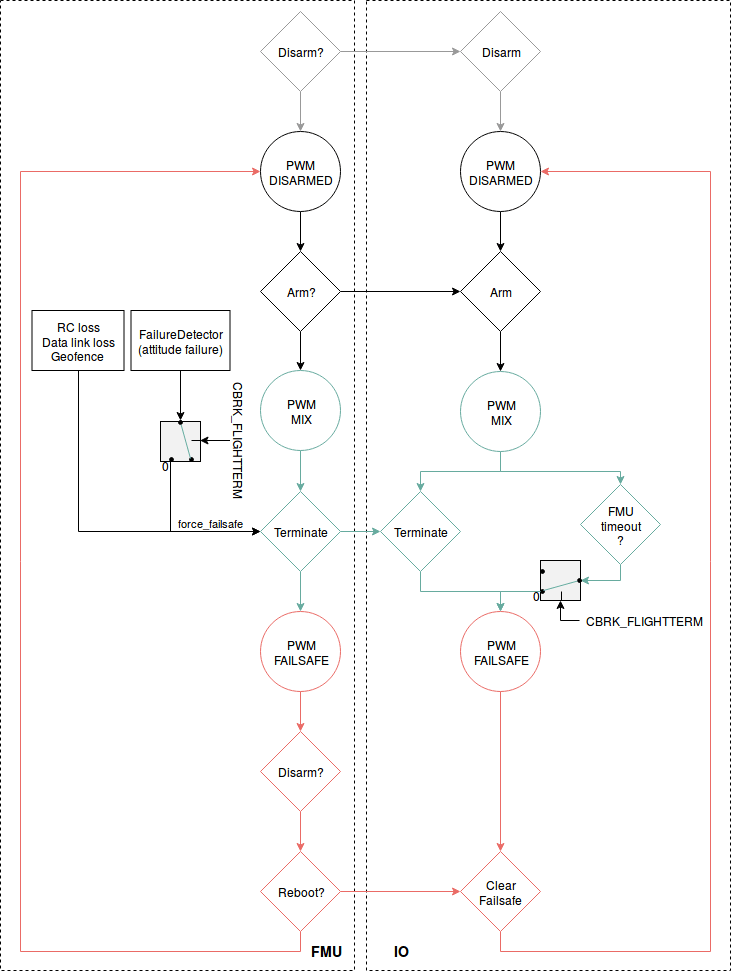
아래의 다이어그램은 비행 중단과 관련된 논리적 흐름을 보여 줍니다.
- PWM_MAIN_DISn to the device's "OFF" PWM value.
- PWM_MAIN_FAILn to the device's "ON" PWM value.
마지막으로, 모든 모터에 대해 PWM_AUX_FAILn 및 PWM_MAIN_FAILn PWM 값을 설정합니다.
- PWM_AUX_DIS1 to the device's "OFF" PWM value.
- PWM_AUX_FAILn to the device's "ON" PWM value.
Finally, set the PWM_AUX_FAILn and PWM_MAIN_FAILn PWM values for any motors.
INFO
Flight termination via ATS only works if drivers/pwm_input is included in the firmware for your board. If not, you need to add it manually to your board configuration using boardconfig.
MAVLink Trigger
The MAV_CMD_DO_FLIGHTTERMINATION command can be used to trigger Flight termination from a ground station or companion computer.
This is sent, for example, when you call the MAVSDK Action plugin terminate() or terminate_async() methods.
로직 다이어그램
The diagram below shows the logical flow around flight termination.