Конфігурація завершення польоту
The Flight termination failsafe action irreversibly turns off controllers and sets PWM values to their parameter configured failsafe values.
INFO
Flight termination differs from the Kill action in that it is permanent until after reboot.
WARNING
This is not an independent Flight Termination System. Якщо втрачається живлення або автопілот повністю відмовляє, аварійні пристрої не будуть активовані.
Загальний огляд
Termination Triggers
Termination may be triggered by:
- Safety checks for RC Loss, geofence violation, and so on (on any vehicle type or in any flight mode).
- Failure Detector trigger
- RC termination switch (mapped to an RC channel using RC_MAP_TERM_SW).
- The MAVLink MAV_CMD_DO_FLIGHTTERMINATION MAVLink command from a GCS or companion computer (see MAVLink Trigger below).
Немає можливості відновлення після аварійного припинення польоту. Після виклику аварійного припинення польоту вам слід якнайшвидше відключити батарею. Перед тим, як знову використовувати транспортний засіб, вам доведеться перезавантажити/вимкнути живлення.
Termination Actions
Коли активується аварійне припинення польоту, PX4 одночасно вимикає всі контролери та встановлює всі виходи PWM у значення аварійного режиму.
Залежно від підключених пристроїв, вихідні значення аварійного режиму PWM можуть бути використані для:
- Розгорніть парашут.
- Витягнути втягуючі стійки шасі.
- Перемістіть гімбал, підключений до PWM, в безпечне положення (або втягніть його), щоб захистити камеру.
- Запустіть надувний пристрій, наприклад подушку безпеки.
- Запустити тривогу.
TIP
PX4 не знає, які пристрої безпеки приєднані - він просто застосовує заздалегідь визначений набір значень ШІМ до своїх виходів.
TIP
Failsafe values are applied to all outputs on termination. Немає способу налаштувати незалежне тригерування моторів або конкретних пристроїв безпеки на основі часу (або іншого критерію).
Конфігурація апаратного забезпечення
Будь-який пристрій безпеки (наприклад, парашут), який може бути активований зміною значення PWM, може бути використаний та підключений до будь-якого вільного порту PWM (як MAIN, так і AUX).
INFO
Якщо ви використовуєте плату серії Pixhawk, вам доведеться окремо живити рейку сервопривода (наприклад, з 5V BEC, який часто також доступний з вашого регулятора обертів).
Конфігурація програмного забезпечення
Тема Безпека пояснює, як встановити аварійне припинення польоту як дію в разі аварії, що має бути виконана для певної перевірки аварійного стану.
Виявник відмов також (опційно) може бути налаштований на активацію аварійного припинення польоту, якщо транспортний засіб перекидається (перевищує певний кут нахилу) або якщо виявлена відмова зовнішньою автоматичною системою спрацьовування (ATS):
- Увімкніть виявник відмов під час польоту, встановивши CBRK_FLIGHTTERM=0.
- Safety > Failure Detector > Attitude Trigger explains how to configure the attitude limits that trigger Flight termination.
INFO
During takeoff excessive attitutes will trigger lockdown (kill motors, but not launch parachute) rather than flight termination. This is always enabled, irrespective of the value of
CBRK_FLIGHTTERM.
:::
- Safety > External Automatic Trigger System (ATS) explains how to configure an external trigger system.
Для кожного основного виходу, до якого підключений пристрій безпеки, де "n" - номер порту PWM, встановіть:
- Безпека > Зовнішня автоматична система спрацьовування (ATS) пояснює, як налаштувати зовнішню систему спрацьовування.
- PWM_MAIN_FAILn to the device's "ON" PWM value.
Для кожного основного виходу, до якого підключений пристрій безпеки, де "n" - номер порту PWM, встановіть:
- PWM_MAIN_DISn до значення "OFF" PWM пристрою.
- PWM_MAIN_FAILn до значення PWM пристрою "ON".
Для кожного AUX виходу, до якого підключений пристрій безпеки, де "n" - номер порту PWM, встановіть:
INFO
Flight termination via ATS only works if drivers/pwm_input is included in the firmware for your board. If not, you need to add it manually to your board configuration using boardconfig.
MAVLink Trigger
The MAV_CMD_DO_FLIGHTTERMINATION command can be used to trigger Flight termination from a ground station or companion computer.
This is sent, for example, when you call the MAVSDK Action plugin terminate() or terminate_async() methods.
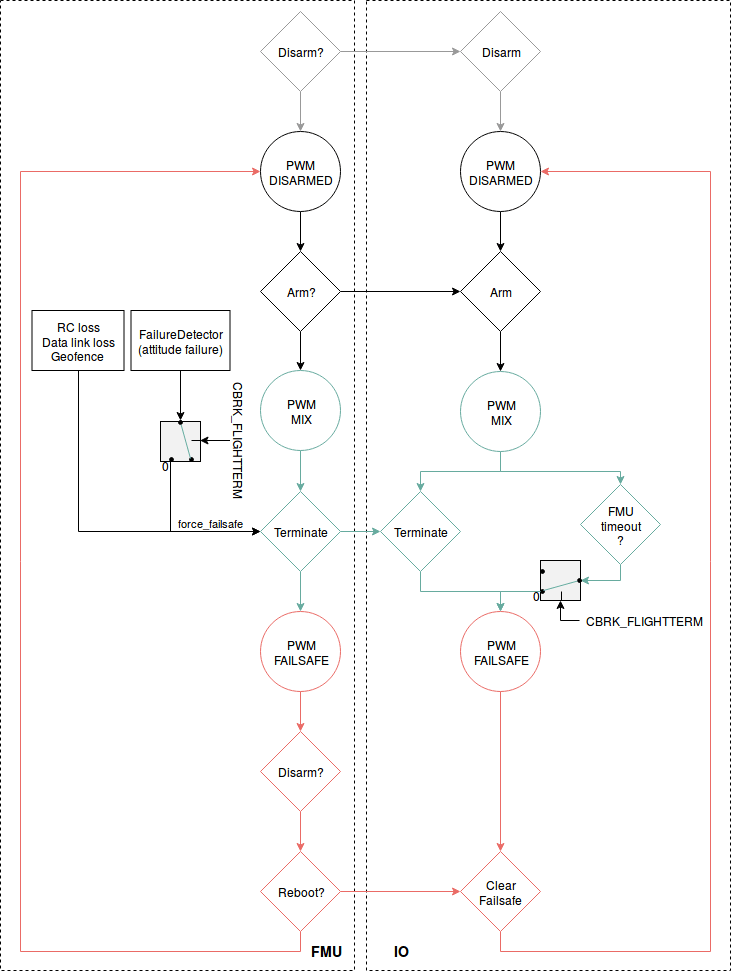
Схема логіки
Нарешті, встановіть значення PWM для портів PWM_AUX_FAILn та PWM_MAIN_FAILn для будь-яких двигунів.