CUAV X25-EVO
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
The X25-EVO is an advanced autopilot manufactured by CUAV®.
The autopilot is recommended for commercial system integration but is also suitable for academic research and any other applications.

The X25-EVO brings you ultimate performance, stability, and reliability in every aspect.
INFO
These flight controllers are manufacturer supported.
特性
- Arm® Cortex-M7® processor (STM32H743XI) with Floating-Point Unit (FPU), operating at 480MHz, and featuring 2MB Flash memory. Enables developers to enhance productivity and efficiency, allowing for more complex algorithms and models.
- Automotive-grade RM3100 compass. Designed for better stability and anti-interference capability.
- Triple-redundant IMUs and dual-redundant barometers located on separate buses. If the PX4 autopilot detects a sensor failure, the system seamlessly switches to another sensor to maintain flight control reliability.
- Independent LDO power control supplies power to each sensor group. A vibration isolation system filters high-frequency vibrations and reduces noise to ensure accurate readings, enabling better overall flight performance for the vehicle.
- Integrated Microchip Ethernet PHY for high-speed communication with onboard devices like mission computers via Ethernet.
- Dual temperature compensation systems, located on the IMU board and FMU board respectively. Temperature is controlled by onboard heating resistors to achieve the optimal operating temperature for the IMUs.
- PWM servo output voltage switchable between 3.3V or 5V.
- Modular design for DIY carrier boards.
Processors & Sensors
- Main Processor: STM32H743XI
- 32-bit Arm® Cortex®-M7, 480MHz, 2MB Flash, 1MB RAM
- Onboard Sensors:
- Accel/Gyro: IIM42652 (x2)
- Accel/Gyro: IIM42653
- Magnetometer: RM3100
- Barometer: BMP581
- Barometer: ICP-20100
Electrical Data
- Rated Voltage:
- Input Voltage: 10~18V
- USB 电源输入:4.75~5.25V
- Servo Rail Input: 0~9.9V
- Rated Current:
- Total Output Max Current: 10A
TELEM1andTELEM2Output Current limiter: 4ACAN1andCAN2Output Current limiter: 2.4A- Other Ports Output Current limiter: 1.5A
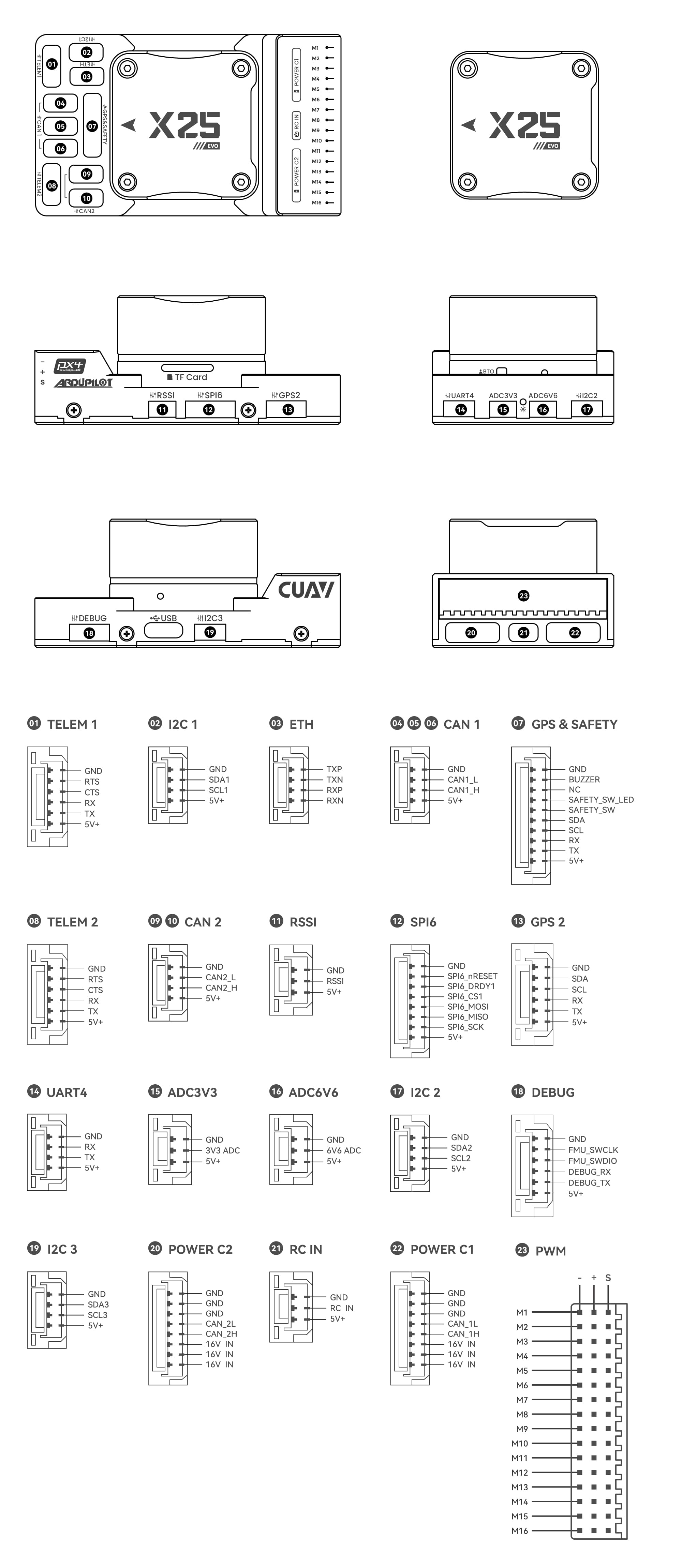
接口
- 16x PWM Servo Outputs
- 1x Dedicated R/C Input(
RC IN) for Spektrum / DSM and S.Bus - 1x Analog/PWM RSSI Input
- 2x TELEM Ports (with full flow control)
- 1x UART4 Port
- 2x GPS Ports
- 1x Full GPS plus Safety Switch Port (GPS1)
- 1x Basic GPS Port (with I2C, GPS2)
- 1x USB Port (TYPE-C)
- 1x Ethernet Port
- Transformerless application
- 100Mbps
- 3x I2C Bus Ports
- 1x SPI Bus
- 1x Chip Select Line
- 1x Data Ready Line
- 1x SPI Reset Line
- 5x CAN Ports for CAN Peripherals
- 3x CAN1 Bus Multiplexed Ports
- 2x CAN2 Bus Multiplexed Ports
- 2x Power Input Ports
- DroneCAN/UAVCAN Power Input
- 2x AD Ports
- Analog Input (3.3V)
- Analog Input (6.6V - not supported by PX4)
- 1x Dedicated Debug Port
- FMU Debug
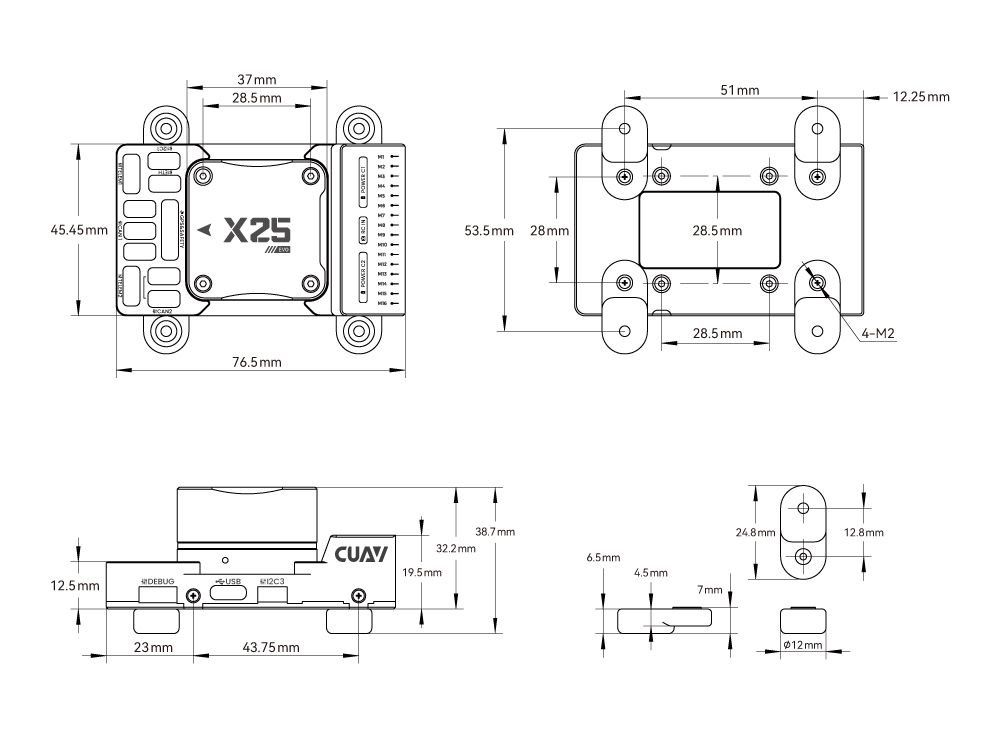
Mechanical Data
重量
- Flight Controller Module: 110g
Operating & storage temperature: -20 ~ 85°C
Dimensions:
Purchase Channels
Order from CUAV.
组装 / 设置
The X25 EVO Wiring Quick Start provides instructions on how to assemble required/important peripherals including GPS, Power Module etc.
针脚定义
串口映射
| UART | 设备 | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 |
| USART2 | /dev/ttyS1 | GPS2 |
| USART3 | /dev/ttyS2 | 调试控制台 |
| UART4 | /dev/ttyS3 | UART4 |
| UART5 | /dev/ttyS4 | TELEM2 |
| USART6 | /dev/ttyS5 | RC IN |
| UART7 | /dev/ttyS6 | TELEM1 |
PWM Outputs
This flight controller supports up to 16 FMU PWM outputs (MAIN).
Outputs:
- Outputs 1-8 support DShot.
- Outputs 9-16 do not support DShot.
- Outputs 1-7 support Bidirectional DShot.
- Output 8 supports Bidirectional DShot output only (no eRPM capture).
The 16 outputs are in 5 groups:
- Outputs 1-4 in group1 (Timer5)
- Outputs 5-8 in group2 (Timer4)
- Outputs 9-11 in group3 (Timer1)
- Outputs 12-14 in group4 (Timer8)
- Outputs 15-16 in group5 (Timer12)
All outputs within the same group must use the same output protocol and rate.
额定电压
The X25-EVO achieves triple redundancy on power supplies if three power sources are provided. The three power rails are POWERC1, POWERC2, and USB.
- POWER C1 and POWER C2 are DroneCAN/UAVCAN battery interfaces.
Normal Operation Maximum Ratings
Under these conditions, all power sources will be used to power the system in the following order:
- POWER C1 and POWER C2 Inputs (10V to 18V)
- USB Input (4.75V to 5.25V)
Voltage monitoring
Digital DroneCAN/UAVCAN battery monitoring is enabled by default.
编译固件
TIP
Most users do not need to build this firmware! It is pre-built and installed automatically by QGroundControl when the appropriate hardware is connected.
To build PX4 for this target, execute:
make cuav_x25-evo_defaultDebug Port
The PX4 System Console and SWD Interface operate on the FMU Debug port.
| 针脚 | 信号 | 电压 |
|---|---|---|
| 1(红) | 5V+ | +5V |
| 2 | DEBUG TX (OUT) | +3.3V |
| 3 | DEBUG RX (IN) | +3.3V |
| 4(黑) | FMU_SWDIO | +3.3V |
| 6 | FMU_SWCLK | +3.3V |
| 6 | GND | GND |
支持的平台/机身
Any multicopter / airplane / rover or boat that can be controlled with normal RC servos or Futaba S-Bus servos. The complete set of supported configurations can be seen in the Airframes Reference.