Gazebo Vehicles
This topic lists/displays the vehicles supported by the PX4 Gazebo simulation, and the make commands required to run them (the commands are run from a terminal in the PX4-Autopilot directory).
The models are included in PX4 as a submodule that is fetched from the Gazebo Models Repository.
Supported vehicle types include: mutirotor, VTOL, Plane, Rover.
WARNING
See Gazebo Classic Vehicles for vehicles that work with the older Gazebo "Classic" simulation. Note that vehicle models are not interchangeable between the two versions of the simulator: the vehicles on this page only work with (new) Gazebo.
멀티콥터
X500 Quadrotor
make px4_sitl gz_x500X500 Quadrotor with Visual Odometry
make px4_sitl gz_x500_vision
X500 Quadrotor with Depth Camera (Front-facing)
This model has a forward-facting depth camera attached, modelled on the OAK-D.
make px4_sitl gz_x500_depth
X500 Quadrotor with Monocular Camera
This model has a simple monocular camera sensor attached (there is no physical camera visualization on the model itself).
make px4_sitl gz_x500_mono_camINFO
The camera cannot yet be used to stream video or for image capture in QGroundControl. PX4-Autopilot#22563 can be used to track the additional work needed to fully enable these use cases.
X500 Quadrotor with Monocular Camera (Down-facing)
This model has a simple monocular camera sensor attached facing down (there is no physical camera visualization on the model itself).
This can be used with the Aruco world to test precision landing.
make px4_sitl gz_x500_mono_cam_downX500 Quadrotor with 1D LIDAR (Down-facing)
This model has a LIDAR attached to the bottom, modelled on the Lightware LW20/C.
It has a range between 0.1 and 100m.
The model can be used for testing rangefinder use cases like landing or terrain following.
make px4_sitl gz_x500_lidar_down
X500 Quadrotor with 1D LIDAR (Front-facing)
This model has a LIDAR attached to the front, modelled on the Lightware LW20/C.
It has a range between 0.2 and 100m.
The model can be used for testing Collision Prevention.
make px4_sitl gz_x500_lidar_front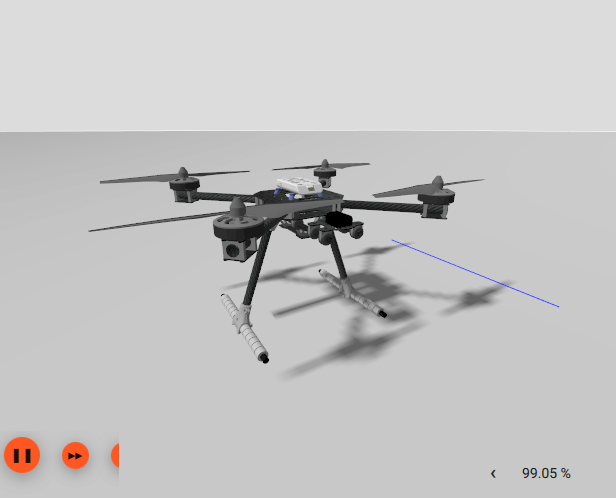
X500 Quadrotor with 2D LIDAR
This model has a 2D LIDAR attached, modelled on the Hokuyo UTM-30LX. It has a range between 0.1 and 30m, and scans in a 270° arc. The model can be used for testing Collision Prevention.
make px4_sitl gz_x500_lidar_2d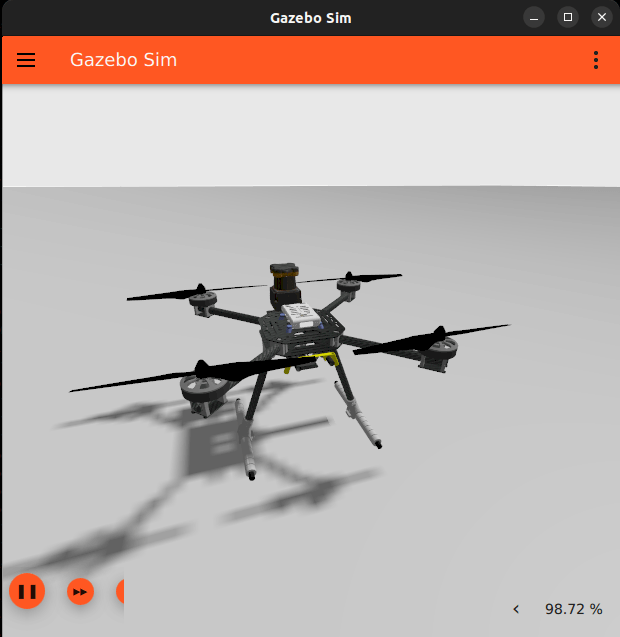
INFO
The sensor information is written to the ObstacleDistance UORB message used by collision prevention.
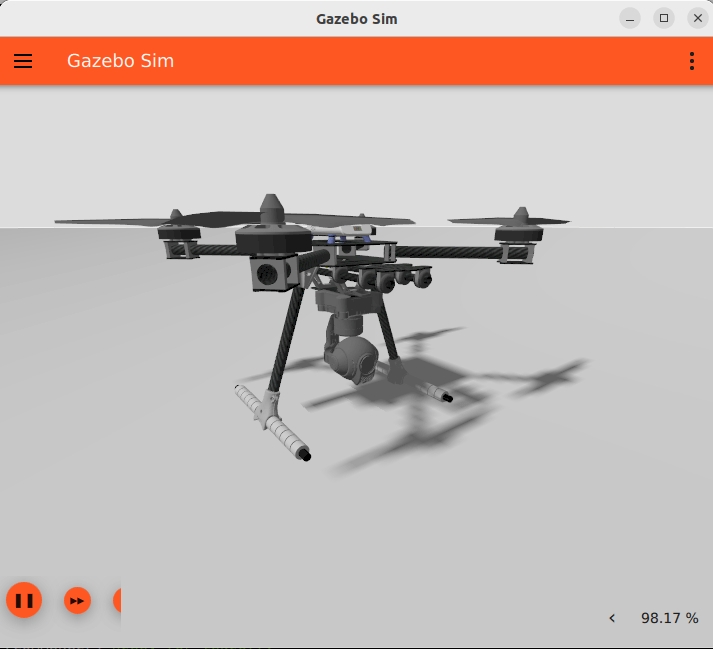
X500 Quadrotor with Gimbal (Front-facing)
This model has a gimbal attached to the front with angular ranges of
- roll: [-
, ] - pitch: [-
, ] - yaw: infinite rotation
The gimbal joints uses position control with a kinematic chain ZXY.
According to the file Gimbal model.sdf file:
- the default horizontal field of view is 2.0 rad ~= 115°
- the default vertical field of view is 0.8848 rad ~= 50.7°
 .
.
make px4_sitl gz_x500_gimbalPlane/Fixed-wing
표준 항공기
make px4_sitl gz_rc_cessna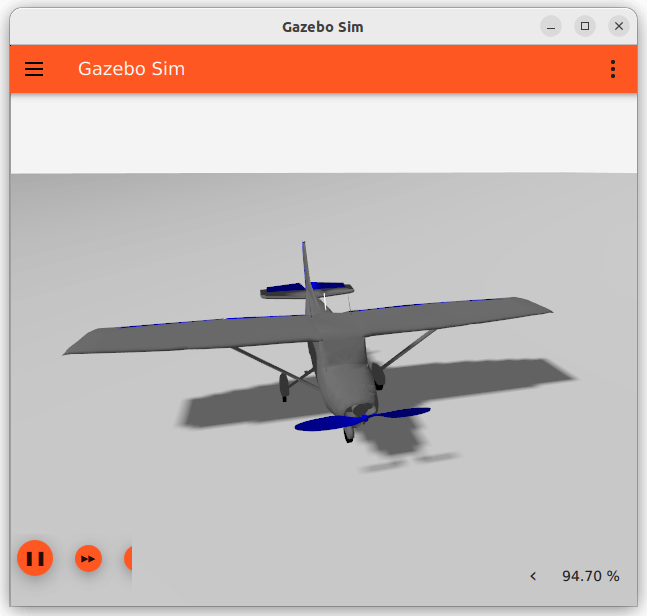
Advanced Plane
PX4 v1.15make px4_sitl gz_advanced_plane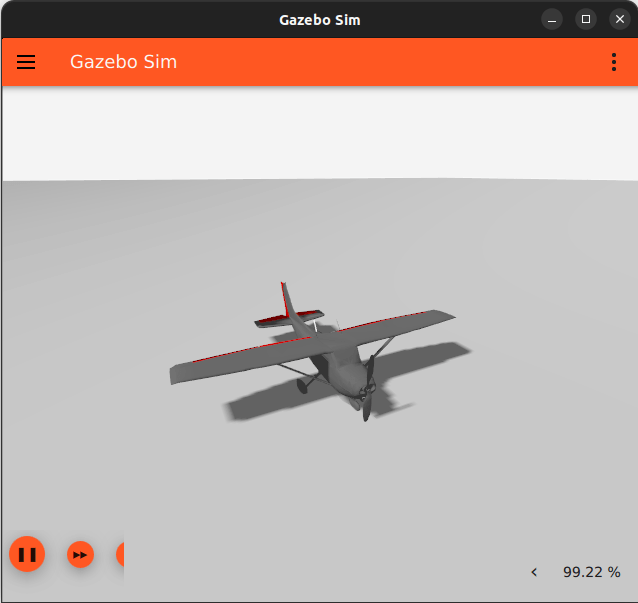
INFO
The difference between the Advanced Plane and the "regular plane" lies in the Lift Physics that the two models use:
- You can configure the Advanced Lift Drag plugin used by the model to more closely match a particular vehicle using the Advanced Lift Drag Tool.
- For more detail on the lift calculations for the Advanced Plane, see PX4-SITL_gazebo-classic/src/liftdrag_plugin/README.md
수직이착륙기(VTOL)
표준 VTOL
make px4_sitl gz_standard_vtol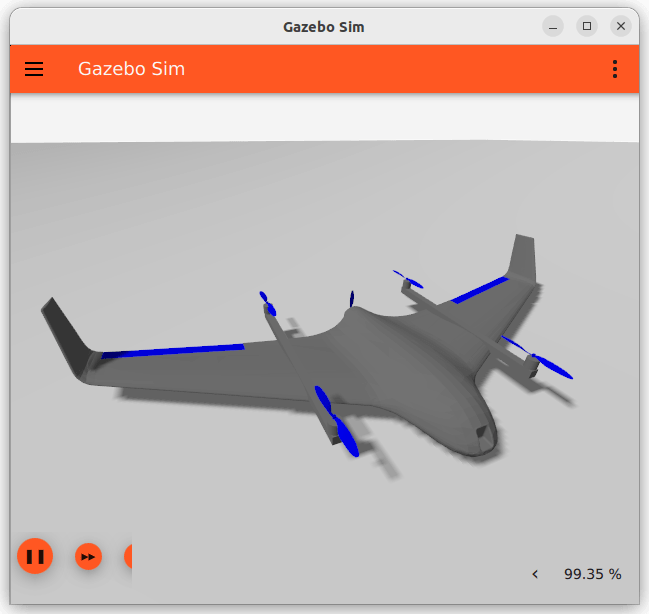
Quad Tailsitter VTOL
A VTOL tailsitter model that uses differential thrust for pitch, roll, and yaw control.
make px4_sitl gz_quadtailsitter
틸트로터 VTOL
A VTOL Plane, where during the transition the front two motors will tilt forward and be used for forward thrust.
make px4_sitl gz_tiltrotor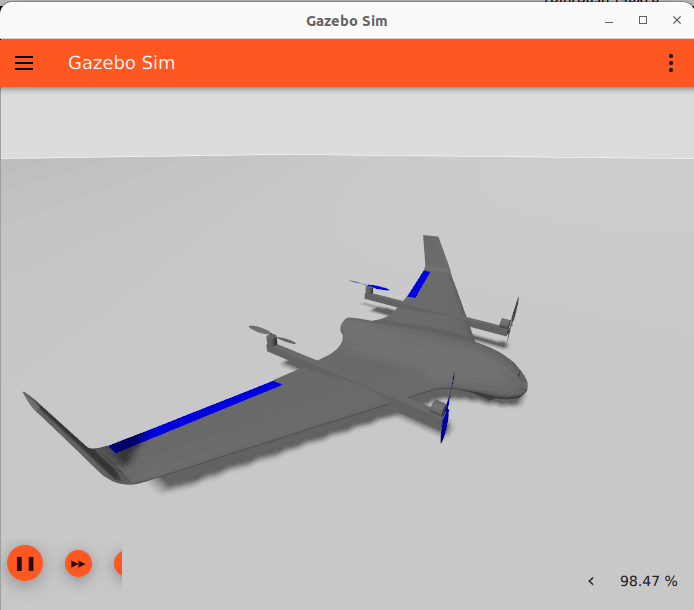
Rover
Differential Rover
Differential Rover uses the rover world by default.
make px4_sitl gz_rover_differential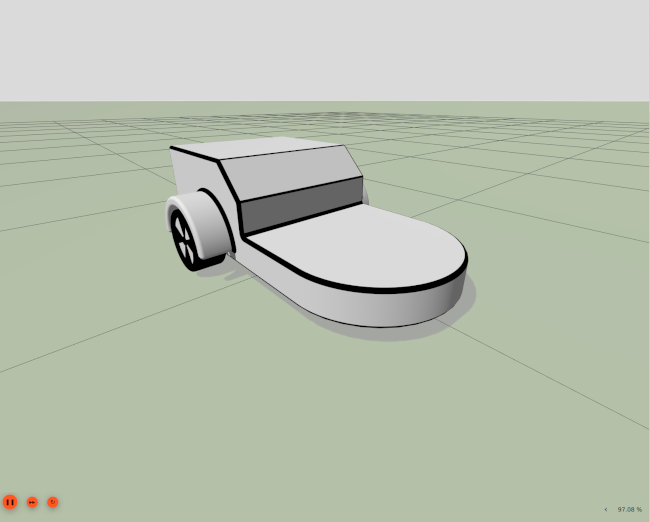
Ackermann Rover
Ackermann Rover uses the rover world by default.
make px4_sitl gz_rover_ackermann
Mecanum Rover
Mecanum Rover uses the rover world by default.
make px4_sitl gz_rover_mecanum