멀티콥터 저크 제한 유형 궤적
저크 제한 궤적 유형은 사용자 스틱 입력 또는 미션 변경 (예 : 촬영, 매핑,화물)에 응답하여 부드러운 동작을 제공합니다. 저크와 가속 제한이 항상 보장되는 부드러운 대칭 S-커브를 생성합니다.
This trajectory type is always enabled in Mission mode. To enable it in Position mode set the parameter MPC_POS_MODE to Smoothed velocity.
INFO
The jerk-limited type is not used by default in position mode. 더 빠른 응답이 필요한 기체(예 : 레이서 쿼드)에는 적합하지 않을 수 있습니다.
궤적 생성기
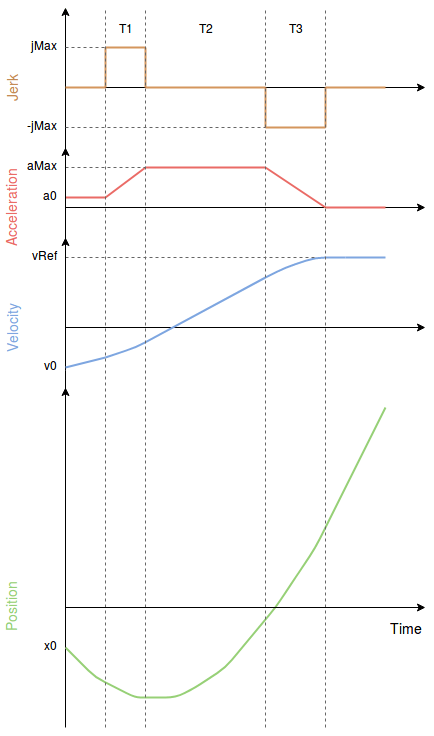
아래의 그래프는 다음과 같은 제약 조건을 가진 일반적인 저크 제한 프로필을 나타냅니다.
jMax: maximum jerka0: initial accelerationaMax: maximum accelerationa3: final acceleration (always 0)v0: initial velocityvRef: desired velocity
The constraints jMax, aMax are configurable by the user via parameters and can be different in manual position control and auto mode.
결과 속도 프로파일을 "S-Curve"라고 합니다.
수동 모드
In manual position mode, the sticks are mapped to velocity where a full XY-stick deflection corresponds to MPC_VEL_MANUAL and a full Z-stick deflection corresponds to MPC_Z_VEL_MAX_UP (upward motion) or MPC_Z_VEL_MAX_DN (downward motion).
제약 조건
XY 평면
jMax: MPC_JERK_MAXaMax: MPC_ACC_HOR_MAX
Z축
jMax: MPC_JERK_MAXaMax(upward motion): MPC_ACC_UP_MAXaMax(downward motion): MPC_ACC_DOWN_MAX
자동 모드
In auto mode, the desired velocity is MPC_XY_CRUISE but this value is automatically adjusted depending on the distance to the next waypoint, the maximum possible velocity in the waypoint and the maximum desired acceleration and jerk. The vertical speed is defined by MPC_Z_V_AUTO_UP (upward motion) and MPC_Z_V_AUTO_DN (downward motion).
제약 조건
XY 평면
jMax: MPC_JERK_AUTOaMax: MPC_ACC_HOR
Z축
jMax: MPC_JERK_AUTOaMax(upward motion): MPC_ACC_UP_MAXaMax(downward motion): MPC_ACC_DOWN_MAX
웨이 포인트에 근접시 속도 증가 거리 :