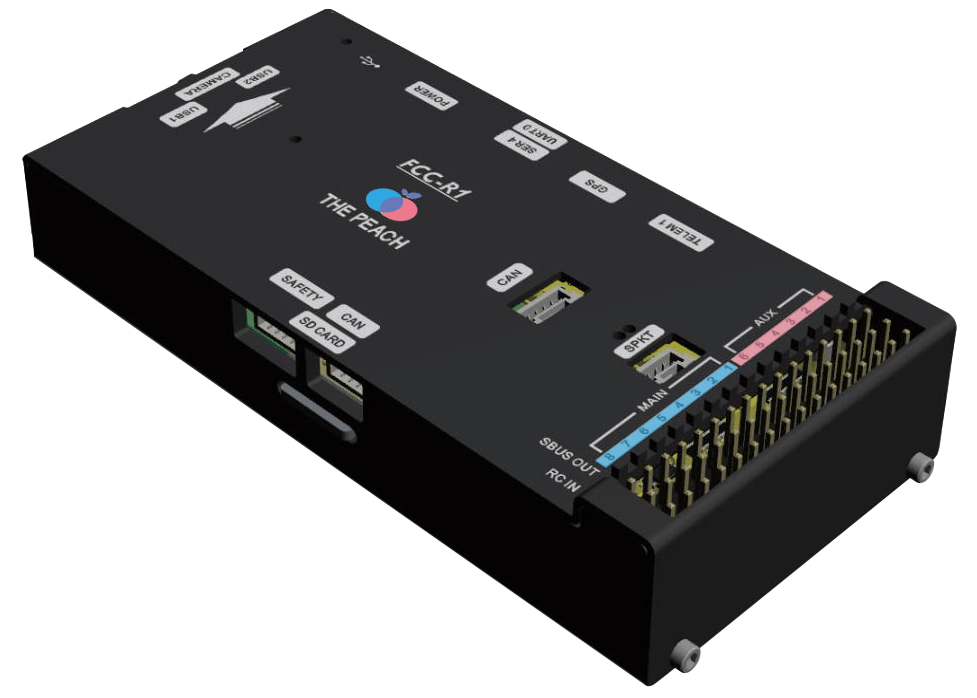
ThePeach FCC-R1
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
ThePeach FCC-R1 is an advanced autopilot designed and made in ThePeach.
It is based on the Pixhawk-project FMUv3 open hardware design and runs PX4 on Nuttx OS.
INFO
This flight controller is manufacturer supported.
사양
Main 프로세서: STM32F427VIT6
- 32bit ARM Cortex-M4, 168 MHz 256 KB RAM 2 MB Flash memory
IO 프로세서: STM32F100C8T6
- ARM Cortex-M3, 32bit ARM Cortex-M3, 24 MHz, 8KB SRAM
내장 센서 :
- 가속도/자이로: ICM-20602
- 가속도/자이로스코프/지자기: MPU-9250
- 기압계: MS5611
인터페이스
- 8+6개의 PWM 출력 (IO 8개, FMU 6개)
- Spektrum DSM / DSM2 / DSM-X Satellite 입력 호환
- Futaba S.BUS 입출력 호환
- PPM 합계 신호 입력
- 아날로그/PWM RSSI 입력
- PWM Servo 출력
- 안전 스위치/LED
- UART 포트 4개: TELEM1, TELEM2(라즈베리파이 CM3+), GPS, SERIAL4
- I2C 포트 2개
- CAN 버스 1개
- 배터리 하나의 전압 / 전류에 대한 아날로그 입력
라즈베리파이 CM3+의 인터페이스
- VBUS
- DDR2 커넥터: 라즈베리파이 CM3+
- UART 포트 1개
- USB 포트 2개
- 라즈베리파이 카메라
기계적 특성
- 치수: 49.2 x 101 x 18.2mm
- 중량: 100g
커넥터
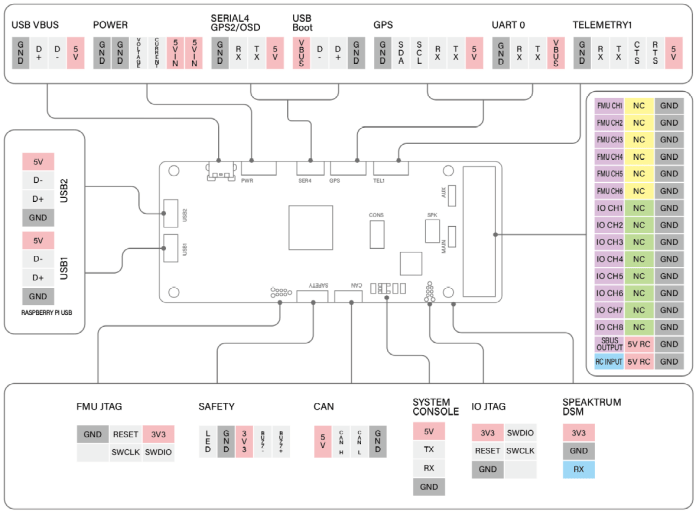
시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| USART1 | /dev/ttyS0 | IO 프로세서 디버그 |
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (라즈베리파이 cm3+) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | 디버그 콘솔 |
| UART8 | /dev/ttyS6 | TELEM4 |
정격 전압
ThePeach FCC-R1 can be double-redundant on the power supply if two power sources are supplied. The two power rails are: POWER and USB.
참고:
- The output power rails FMU PWM OUT and I/O PWM OUT do not power the flight controller board (and are not powered by it). You must supply power to one of POWER or USB or the board will be unpowered.
- The USB do not power the Raspberry Pi CM3+. You must supply power to POWER or the Raspberry Pi CM3+ will be unpowered.
Normal Operation Maximum Ratings
이러한 조건에서 전원은 아래의 순서대로 시스템에 전원을 공급하여야 합니다.
- POWER 입력 (5V ~ 5.5V)
- USB 입력(4.75V ~ 5.25V)
Absolute Maximum Ratings
이러한 조건에서 모든 전원은 비행 컨트롤러에 영구적인 손상을 입힙니다.
POWER 입력 (5.5V 초과)
USB 입력 (5.5V 초과)
펌웨어 빌드
이 비행 컨트롤러용 PX4를 빌드하려면:
make thepeach_r1_default구매처
Order from ThePeach