FunCub QuadPlane (Pixhawk)
Fun Cub QuadPlane VTOL은 쿼드콥터로 개조된 표준 테일 플레인 항공기(Multiplex FunCub)입니다.
주요 정보:
- Frame: Multiplex FunCub
- Flight controller: Pixhawk

수정되지 않은 Fun Cub는 가격이 비교적 저렴하며, 비행방법도 비교적 쉬운 편입니다. 조립 후의 비행기는 비교적 무겁우며, 비행이 간단하지 않습니다. 비행 기능은 우수하지만, 전진 비행시에는 약 75 %의 추진력이 필요합니다.
부품 명세서
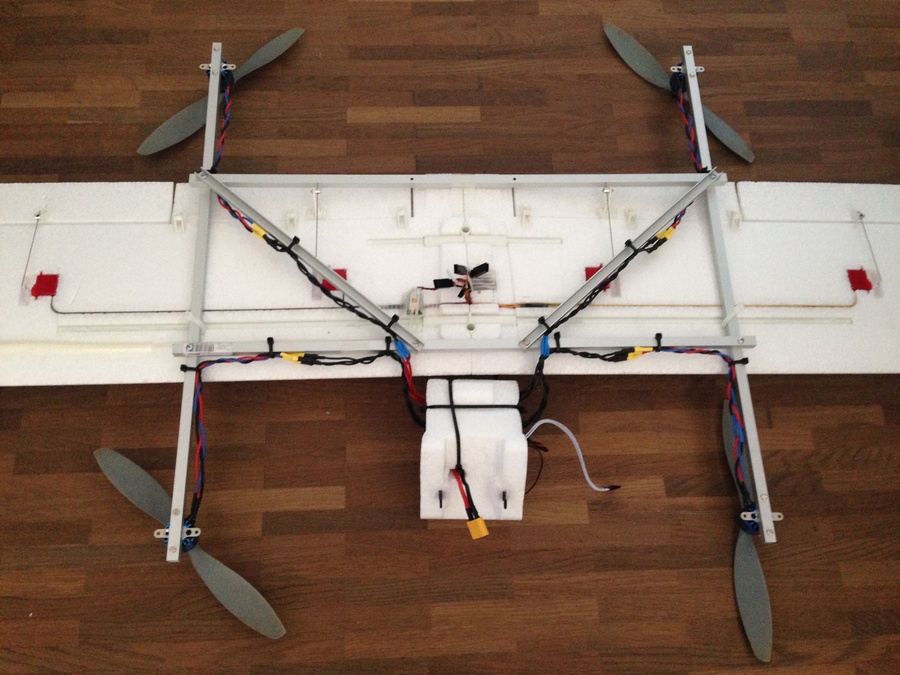
실제 평면도는 위의 이미지와 비슷합니다 (다른 유사한 모델도 잘 작동합니다. 이것은 Multiplex Fun Cub입니다).
필요한 최소 장비는 다음과 같습니다.
- Multiplex FunCub (또는 유사 제품)
- Pixhawk 또는 호환 제품
- 디지털 풍속 센서
- 900kV 모터(예 : Iris 추진 세트 - 모터 및 ESC)
- 쿼드 모터용 10 " 프로펠러(10x45 또는 10x47)
- 고정익 모터용 10" 프로펠러(10 × 7)
- GPS 모듈
- 4S 배터리
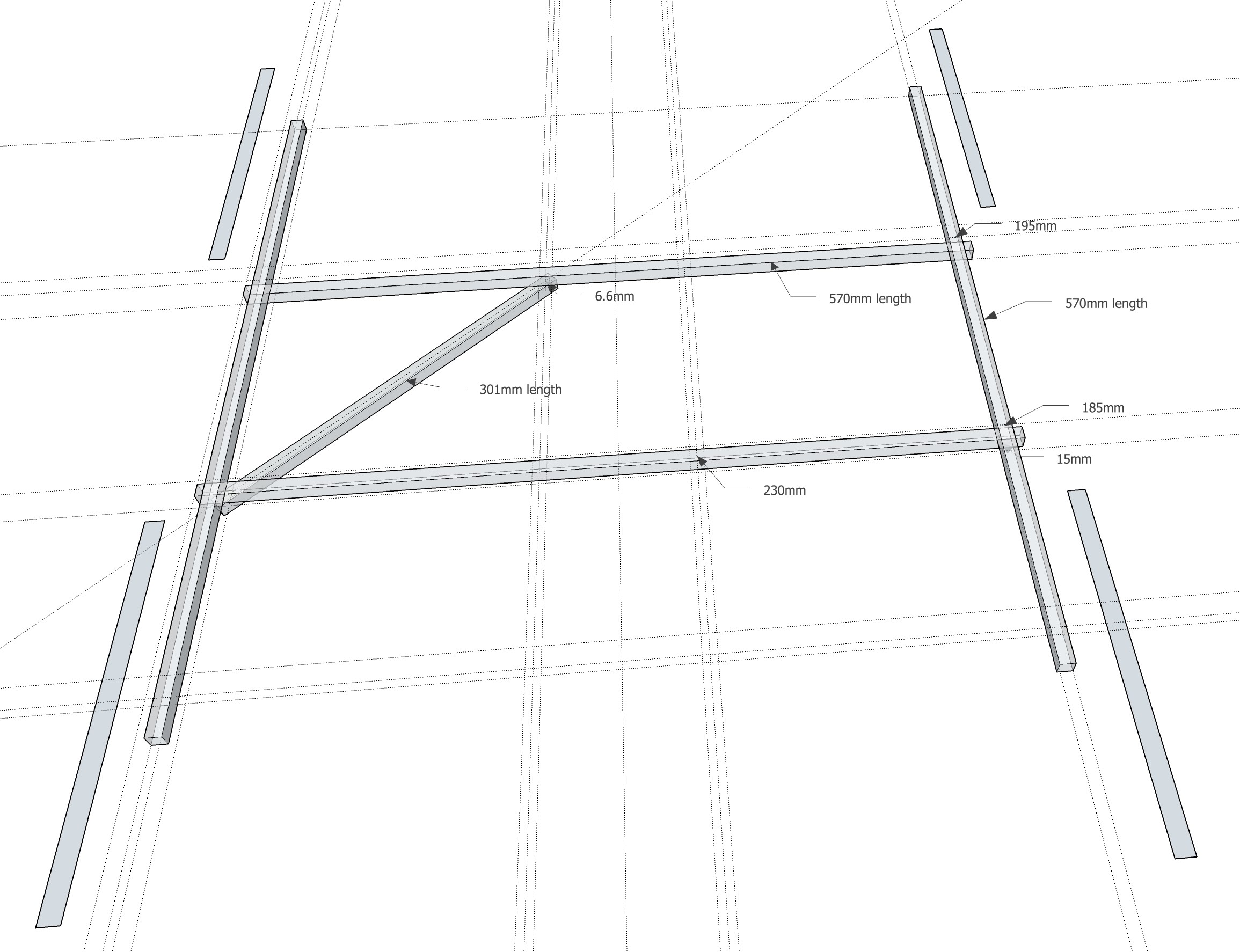
- 쿼드 모터 장착용 알루미늄 프레임 (10x10mm 사각 튜브, 벽 두께 1mm)
- TOW는 4200mAh 4S 배터리로 중량은 약 2.3kg입니다.
구조
구조는 아래와 같은 알루미늄 재질로 만들어집니다.
배선
Motor and servo wiring is nearly entirely up to you, but should match the Generic Standard VTOL configuration, as shown in the airframe reference. The geometry and output assignment can be configured in the Actuators Configuration
For example, you might wire it up like this example (orientation as if "sitting in the plane"):
| 포트 | 연결 |
|---|---|
| MAIN 1 | 전방 우측(반시계 방향) |
| MAIN 2 | 후방 좌측 모터(반시계 방향) |
| MAIN 3 | 전방 좌측 모터(시계 방향) |
| MAIN 4 | 후방 우측 모터(시계 방향) |
| AUX 1 | 좌측 보조익 TODO |
| AUX 2 | Right aileron |
| AUX 3 | Elevator |
| AUX 4 | Rudder |
| AUX 5 | Throttle |
For further instructions on wiring and configurations please see: Standard VTOL Wiring and Configuration.
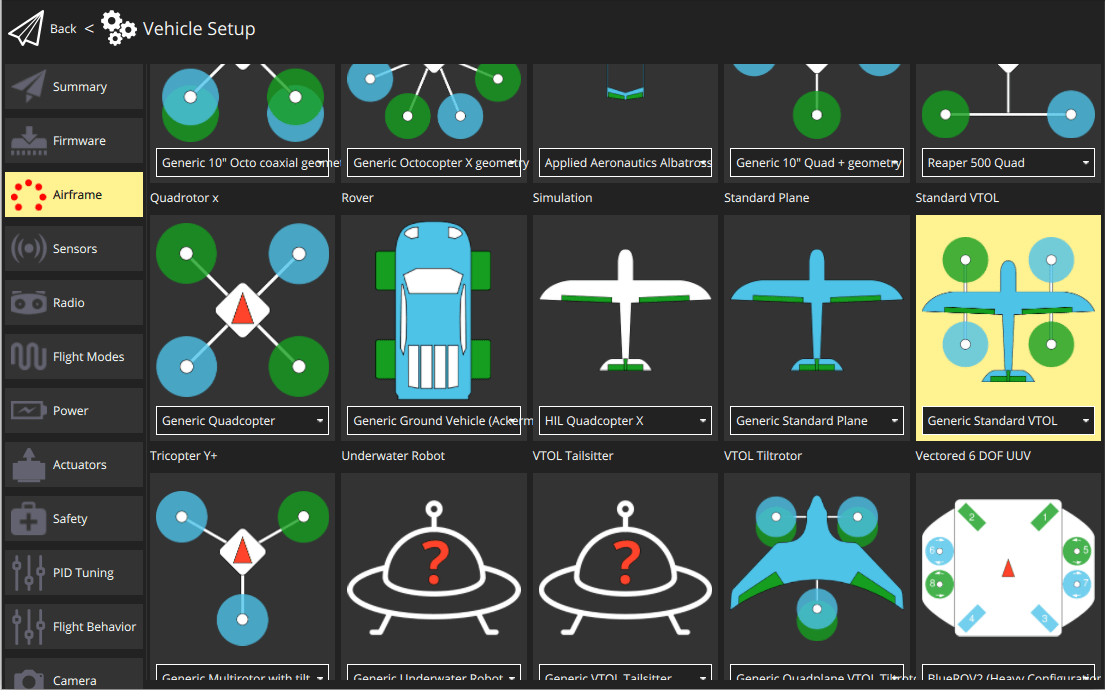
기체 설정
For Airframe select the vehicle group/type as Standard VTOL and the specific vehicle as Generic Standard VTOL as shown below (do not forget to click Apply and Restart in the top).
Configure the outputs and geometry following the instructions in Actuators Configuration
The default parameters are often sufficient for stable flight. For more detailed tuning information see Standard VTOL Wiring and Configuration.
After you finish calibration the VTOL is ready to fly.