Safety (Failsafe) Configuration
PX4에는 문제 발생시에 기체를 보호하고 복구하는 다양한 안전장치들을 제공합니다.
- Failsafes allow you to specify areas and conditions under which you can safely fly, and the action that will be performed if a failsafe is triggered (for example, landing, holding position, or returning to a specified point). The most important failsafe settings are configured in the QGroundControl Safety Setup page. Others must be configured via parameters.
- Safety switches on the remote control can be used to immediately stop motors or return the vehicle in the event of a problem.
QGroundControl 안전 설정
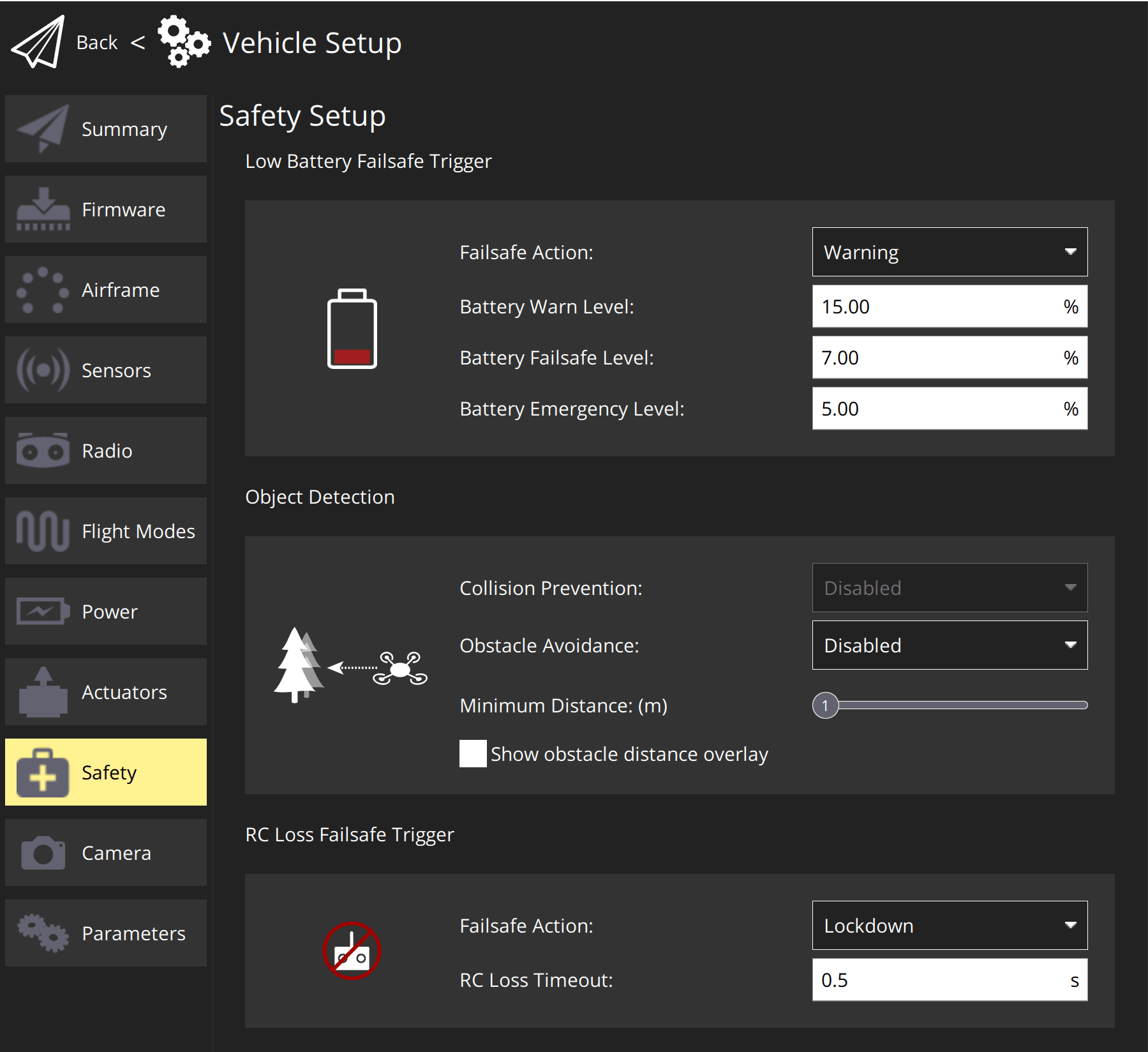
The QGroundControl Safety Setup page is accessed by clicking the QGroundControl icon, Vehicle Setup, and then Safety in the sidebar. This includes many of the most important failsafe settings (battery, RC loss etc.) and the settings for the triggered actions Return and Land.
안전장치 기능
When a failsafe is triggered, the default behavior (for most failsafes) is to enter Hold for COM_FAIL_ACT_T seconds before performing an associated failsafe action. This gives the user time to notice what is happening and override the failsafe if needed. In most cases this can be done by using RC or a GCS to switch modes (note that during the failsafe-hold, moving the RC sticks does not trigger an override).
The list below shows the set of all failsafe actions, ordered in increasing severity. Note that different types of failsafe may not support all of these actions.
| 동작 | 설명 |
|---|---|
| None/Disabled | No action. The failsafe will be ignored. |
| Warning | A warning message will be sent (i.e. to QGroundControl). |
| Hold mode | The vehicle will enter Hold mode (MC) or Hold mode (FW) and hover or circle, respectively. VTOL vehicles will hold according to their current mode (MC/FW). |
| Return mode | The vehicle will enter Return mode. Return behaviour can be set in the Return Home Settings (below). |
| Land mode | The vehicle will enter Land mode (MC) or Land mode (FW), and land. A VTOL will first transition to MC mode. |
| Disarm | Stops the motors immediately. |
| Flight termination | Turns off all controllers and sets all PWM outputs to their failsafe values (e.g. PWM_MAIN_FAILn, PWM_AUX_FAILn). 안전장치 출력은 낙하산, 랜딩 기어를 배치하거나 다른 작업을 수행할 수 있습니다. 고정익은 안전하게 활공할 수 있습니다. |
If multiple failsafes are triggered, the more severe action is taken. For example if both RC and GPS are lost, and manual control loss is set to Return mode and GCS link loss to Land, Land is executed.
TIP
The exact behavior when different failsafes are triggered can be tested with the Failsafe State Machine Simulation.
복귀 설정
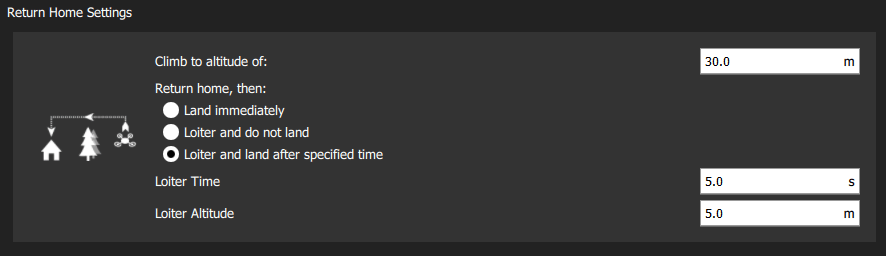
Return is a common failsafe action that engages Return mode to return the vehicle to the home position. The default settings for each vehicle are usually suitable, though for fixed wing vehicles you will usually need to define a mission landing.
TIP
If you want to change the configuration you should carefully read the Return mode documentation for your vehicle type to understand the options.
QGC allows users to set some aspects of the return mode and landing behaviour, such as the altitude to fly back, and the loiter time if you need to deploy landing gear.
착륙 모드 설정
Land at the current position is a common failsafe action (in particular for multicopters), that engages Land Mode. The default settings for each vehicle are usually suitable.
TIP
If you want to change the configuration you should carefully read the Land mode documentation for your vehicle type to understand the options.
QGC allows users to set some aspects of the landing behaviour, such as the time to disarm after landing and the descent rate (for multicopters only).

Battery Failsafes
Battery level failsafe
The low battery failsafe is triggered when the battery capacity drops below battery failafe level values. You can configure both the levels and the failsafe actions at each level in QGroundControl.
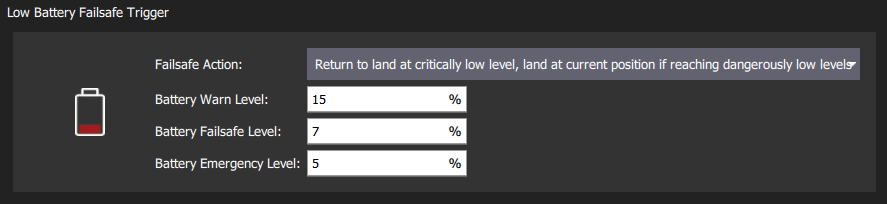
The most common configuration is to set the values and action as above (with Warn > Failsafe > Emergency), and to set the Failsafe Action to warn at "warn level", trigger Return mode at "Failsafe level", and land immediately at "Emergency level".
설정에 관련된 기본 매개변수는 다음과 같습니다.
| 설정 | Parameter | 설명 |
|---|---|---|
| Failsafe Action | COM_LOW_BAT_ACT | Warn, Return, or Land based when capacity drops below the trigger levels. |
| Battery Warn Level | BAT_LOW_THR | 경고 (또는 기타 조치)에 대한 용량을 백분율로 설정합니다. |
| Battery Failsafe Level | BAT_CRIT_THR | 귀환 조치 (또는 단일 조치가 선택된 경우 다른 조치)에 대한 용량에 대한 백분율. |
| Battery Emergency Level | BAT_EMERGEN_THR | 즉시 착륙시의 용량의 백분율. |
Flight Time Failsafes
There are several other "battery related" failsafe mechanisms that may be configured using parameters:
- The "remaining flight time for safe return" failsafe (COM_FLTT_LOW_ACT) is engaged when PX4 estimates that the vehicle has just enough battery remaining for a return mode landing. You can configure this to ignore the failsafe, warn, or engage Return mode.
- The "maximum flight time failsafe" (COM_FLT_TIME_MAX) allows you to set a maximum flight time after takeoff, at which the vehicle will automatically enter return mode (it will also "warn" at 90% of this time). This is like a "hard coded" estimate of the total flight time in a battery. The feature is disabled by default.
- The "minimum battery" for arming parameter (COM_ARM_BAT_MIN) prevents arming in the first place if the battery level is below the specified value.
설정에 관련된 기본 매개변수는 다음과 같습니다.
| 설정 | Parameter | 설명 |
|---|---|---|
| Low flight time for safe return action | COM_FLTT_LOW_ACT | Action when return mode can only just reach safety with remaining battery. 0: None (default), 1: Warning, 3: Return mode. |
| Maximum flight time failsafe level | COM_FLT_TIME_MAX | Maximum allowed flight time before Return mode will be engaged, in seconds. -1: Disabled (default). |
Manual Control Loss Failsafe
A Manual Control Loss Failsafe is triggered after a manual control loss timeout in which none of the configured Manual Controllers are available.

The QGCroundControl Safety UI allows you to set the failsafe action and manual control loss timeout. Users that want to disable this failsafe in specific modes can do so using the parameter COM_RCL_EXCEPT.
INFO
PX4 and the receiver may also need to be configured in order to detect RC loss: Radio Setup > RC Loss Detection.
Additional (and underlying) parameter settings are shown below.
| Parameter | 설정 | 설명 |
|---|---|---|
| COM_RC_LOSS_T | Manual Control Loss Timeout | Time after last setpoint received from the selected manual control source after which manual control is considered lost. This must be kept short because the vehicle will continue to fly using the last known stick position until the timeout triggers. |
| COM_FAIL_ACT_T | Failsafe Reaction Delay | Delay in seconds between failsafe condition being triggered (COM_RC_LOSS_T) and failsafe action (RTL, Land, Hold). In this state the vehicle waits in hold mode for the manual control source to reconnect. This might be set longer for long-range flights so that intermittent connection loss doesn't immediately invoke the failsafe. It can be to zero so that the failsafe triggers immediately. |
| NAV_RCL_ACT | 안전장치 동작 | Disabled, Loiter, Return, Land, Disarm, Terminate, Hold mode (no failsafe). |
| COM_RCL_EXCEPT | RC 손실 예외 | Set modes in which manual control loss is ignored. |
Hold Mode (No Failsafe)
The Hold mode (no failsafe) action (NAV_RCL_ACT = 7) is a special case that does not enter the failsafe. Instead, if manual control is lost while actively flying a manual mode (such as Position, Altitude, or Stabilized), the vehicle switches to Hold mode as if the user had commanded it: there is no failsafe state and no alarming failsafe notification. This is intended for operations where a switch to Hold on manual control loss is expected and should not be surfaced as a failsafe (for example when operating multiple drones with one GCS).
If Hold cannot be entered (for example without a valid position estimate), the normal failsafe takes over and escalates from there (Return, Land, Descend, or Terminate as applicable). Manual control loss in any non-manual (auto/offboard) mode is ignored with this setting.
데이터 연결불량 안전장치
The Data Link Loss failsafe is triggered if the connection to the last MAVLink ground station like QGroundControl is lost. Users that want to disable this failsafe in specific modes can do so using the parameter COM_DLL_EXCEPT.

설정에 관련된 기본 매개변수는 다음과 같습니다.
| 설정 | Parameter | 설명 |
|---|---|---|
| 데이터 연결불량 시간 초과 | COM_DL_LOSS_T | 데이터 연결이 끊어진 후 안전 장치가 동작하기 전까지의 시간입니다. |
| 안전장치 동작 | NAV_DLL_ACT | Disabled, Hold mode, Return mode, Land mode, Disarm, Terminate. |
| Mode exceptions for DLL failsafe | COM_DLL_EXCEPT | Set modes in which data link loss is ignored. |
Geofence 안전장치
The Geofence Failsafe is triggered when the drone breaches a "virtual" perimeter. In its simplest form, the perimeter is set up as a cylinder centered around the home position. If the vehicle moves outside the radius or above the altitude the specified Failsafe Action will trigger.
Note that the failsafe action will only trigger once the vehicle has already breached the geofence. If you have a strict no-fly zone for safety or legal reasons, set GF_ACTION to Hold and include a safety margin in your geofences. The margin should be at least:
- Fixed-Wing: The loiter radius NAV_LOITER_RAD.
- Multicopter: The stopping distance (
v^2 / 2awithv=MPC_XY_VEL_MAX anda=MPC_ACC_HOR_MAX).
Use a margin above those nominal values to account for possible tailwind, position uncertainty, attitude tracking delay, etc.

TIP
PX4 separately supports more complicated Geofence geometries with multiple arbitrary polygonal and circular inclusion and exclusion areas: Flying > Geofence.
The settings and underlying geofence parameters are shown below.
| 설정 | Parameter | 설명 |
|---|---|---|
| GF_ACTION | 없음, 경고, 보류 모드, 반환 모드, 종료, 착륙. | |
| 최대 반경 | GF_MAX_HOR_DIST | 지오펜스 실린더의 수평 반경. 0 인 경우 지오펜스가 비활성화됩니다. |
| 최대 고도 | GF_MAX_VER_DIST | 지오펜스 실린더의 높이. 0 인 경우 지오펜스가 비활성화됩니다. |
INFO
Setting GF_ACTION to terminate will kill the vehicle on violation of the fence. Due to the inherent danger of this, this function is disabled using CBRK_FLIGHTTERM, which needs to be reset to 0 to really shut down the system.
다음 설정도 가능하지만 QGC UI에 표시되지 않습니다.
| 설정 | Parameter | 설명 |
|---|---|---|
| Geofence source | GF_SOURCE | 위치 소스가 글로벌 위치인지 또는 GPS 장치에서 직접 가져오는 지를 설정합니다. |
| Circuit breaker for flight termination | CBRK_FLIGHTTERM | 비행 종료 작업을 활성화/비활성화합니다 (기본적으로 비활성화 됨). |
Position Estimation Failsafes
This section describes failsafes related to the quality of the vehicle's position estimate.
Position Loss Failsafe
The Position Loss Failsafe is triggered if the quality of the PX4 position estimate falls below acceptable levels (this might be caused by GPS loss) while in a mode that requires an acceptable position estimate.
Position Loss Failsafe Trigger
The position loss failsafe triggers if the position estimate becomes invalid. There are two mechanisms in PX4 to invalidate the position estimate:
- A timeout since the last sensor data was fused that provides direct speed or horizontal position measurements.
- Sensors that fall into that category are: GNSS, optical flow, airspeed, VIO, auxiliary global position.
- The estimated horizontal position inaccuracy exceeds the threshold COM_POS_LOW_EPH
- This check is only done on hovering systems (rotary-wing vehicles or VTOLs in hover phase). For fixed-wing vehicles, refer to the Position Accuracy Low section.
The relevant parameters shown below.
| Parameter | 설명 |
|---|---|
| EKF2_NOAID_TOUT | Maximum inertial dead-reckoning time, so the time after the last data sample was received of any sensor that constrains the velocity drift [microseconds]. |
| COM_POS_FS_EPH | Horizontal position error threshold for hovering vehicles (Multicopters and VTOLs in hover). Fixed-wing vehicles have this value set to infinity. |
Position Loss Failsafe Action
Multicopters will switch to Altitude mode if a height estimate is available, otherwise Stabilized mode.
Fixed-wing planes, and VTOLs not configured to land in hover (NAV_FORCE_VT), have a parameter (FW_GPSF_LT) that defines how long they will loiter (circle with a constant roll angle (FW_GPSF_R) at the current altitude) after losing position before attempting to land. If VTOLs have are configured to switch to hover for landing (NAV_FORCE_VT) then they will first transition and then descend.
The relevant parameters are:
| Parameter | 설명 |
|---|---|
| FW_GPSF_LT | Fixed-wing only: Loiter time (waiting at current altitude for position estimation recovery before starting to descend). 비활성화 하려면 0으로 설정하십시오. |
| FW_GPSF_R | 선회 비행시 고정 롤/뱅크 각도. |
| NAV_FORCE_VT | If true, force VTOL takeoff and landing, even in Descend failsafe. |
Position Accuracy Low Failsafe
In Fixed-wing, the position estimate is never strictly invalidated as long as we have a horizontal aiding source, such as an airspeed sensor. In that case, a separate failsafe can be configured that triggers if the position estimate inacuraccy exceeds the threshold COM_POS_LOW_EPH. The failsafe action is taken if the vehicle is in mission or hold mode, otherwise it is only a warning. The relevant parameters are:
| Parameter | 설명 |
|---|---|
| COM_POS_LOW_EPH | Position inaccuracy threshold above which COM_POS_LOW_ACT is taken. |
| COM_POS_LOW_ACT | Failsafe action taken when position inaccuracy is above configured threshold. |
Note that if there is no horizontal aiding source anymore, the position estimate is invalidated after EKF2_NOAID_TOUT, and the standard position loss failsafe applies.
GNSS Check Failsafe
PX4 v1.18Triggers on either of:
- Count drop: receivers with a 3D fix drop below SYS_HAS_NUM_GNSS. No failsafe action when
SYS_HAS_NUM_GNSS=0(default). - Position divergence: two receivers disagree beyond their expected separation (configured via SENS_GPS0_OFFX/Y, SENS_GPS1_OFFX/Y) plus reported accuracy. Only triggers a failsafe action if
SYS_HAS_NUM_GNSS=2.
At least a warning is emitted, additional failsafe actions can be configured using COM_GNSSLOSS_ACT. Loss of a single GPS when none are required is handled by other GPS health checks.
| Parameter | 설명 |
|---|---|
| SYS_HAS_NUM_GNSS | Number of usable GNSS receivers required for arming and flight. If two are required then they also need to be consistent. |
| COM_GNSSLOSS_ACT | Failsafe action when a GNSS failure is detected. Actions other than a warning also lead to arming being blocked. |
오프 보드 안전 장치
The Offboard Loss Failsafe is triggered if the offboard link is lost while under Offboard control.
관련된 매개 변수는 다음과 같습니다.
| Parameter | 설명 |
|---|---|
| COM_OF_LOSS_T | 오프 보드 단락이후 안전장치 동작 지연 여부 설정. |
| COM_OBL_RC_ACT | Flight mode to switch to if offboard control is lost. |
교통 회피 안전 장치
The Traffic Avoidance Failsafe allows PX4 to respond to cooperative traffic reports. The action parameters depend on the conflict model selected when the firmware is built.
관련된 매개 변수는 다음과 같습니다.
| Parameter | 설명 |
|---|---|
| DAA_EN | Enables or disables Detect and Avoid. |
| NAV_TRAFF_AVOID | Action for the Crosstrack model. |
| DAA_LVL_LOW_ACT | F3442-mode action for a LOW conflict. |
| DAA_LVL_MED_ACT | F3442-mode action for a MEDIUM conflict. |
| DAA_LVL_HIGH_ACT | F3442-mode action for a HIGH conflict. |
| DAA_LVL_CRIT_ACT | F3442-mode action for a CRITICAL conflict. |
All action parameters use Disabled, Warn only, Return mode, Land mode, Position Hold mode, and Terminate. See Detect and Avoid for conflict-model and action-transition details.
Remote ID Failsafe
PX4 v1.18The Remote ID failsafe is triggered when the Remote ID (Open Drone ID) module is not detected or reports as unhealthy while the vehicle is armed.
The failsafe action and arming behaviour are both configured by the COM_ARM_ODID parameter:
| Parameter | 설명 |
|---|---|
| COM_ARM_ODID | Remote ID arming check and in-flight failsafe. 0: Disabled (default), 1: Warning only, 2: Error only (prevents arming), 3: Return, 4: Land, 5: Terminate.On failsafe: - Error, Return, Land and Terminate prevent arming.- Return, Land and Terminate start the associated action/mode when airborne. |
Parachute Health Failsafe
PX4 v1.18The parachute health failsafe is triggered when a MAVLink parachute system is missing or unhealthy while the vehicle is armed or airborne.
| Parameter | 설명 |
|---|---|
| COM_PARACHUTE | Parachute system monitoring and failsafe action.0: Disabled (default), 1: Warning, 2: Return, 3: Land.- Everything but Disabled prevents arming with a failing check.- Return and Land start the associated action when a failure happens in-flight. |
Quad-chute Failsafe
Failsafe for when a VTOL vehicle can no longer fly in fixed-wing mode, perhaps due to the failure of a pusher motor, airspeed sensor, or control surface. If the failsafe is triggered, the vehicle will immediately switch to multicopter mode and execute the action defined in parameter COM_QC_ACT.
INFO
The quad-chute can also be triggered by sending a MAVLINK MAV_CMD_DO_VTOL_TRANSITION message with param2 set to 1.
The parameters that control when the quad-chute will trigger are listed in the table below.
| Parameter | 설명 |
|---|---|
| COM_QC_ACT | Quad-chute action after switching to multicopter flight. Can be set to: Warning, Return, Land, Hold. |
| VT_FW_QC_HMAX | Maximum quad-chute height, below which the quad-chute failsafe cannot trigger. This prevents high altitude quad-chute descent, which can drain the battery (and itself cause a crash). The height is relative to ground, home, or the local origin (in preference order, depending on what is available). |
| VT_QC_ALT_LOSS | Uncommanded descent quad-chute altitude threshold. In altitude controlled modes, such as Hold mode, Position mode, Altitude mode, or Mission mode, a vehicle should track its current "commanded" altitude setpoint. The quad chute failsafe is triggered if the vehicle falls too far below the commanded setpoint (by the amount defined in this parameter). Note that the quad-chute is only triggered if the vehicle continuously loses altitude below the commanded setpoint; it is not triggered if the commanded altitude setpoint increases faster than the vehicle can follow. |
| VT_QC_T_ALT_LOSS | Altitude loss threshold for quad-chute triggering during VTOL transition to fixed-wing flight. The quad-chute is triggered if the vehicle falls this far below its initial altitude before completing the transition. |
| VT_FW_MIN_ALT | Minimum altitude above Home for fixed-wing flight. When the altitude drops below this value in fixed-wing flight the vehicle a quad-chute is triggered. |
| VT_FW_QC_R | Absolute roll threshold for quad-chute triggering in FW mode. |
| VT_FW_QC_P | Absolute pitch threshold for quad-chute triggering in FW mode. |
High Wind Failsafe
The high wind failsafe can trigger a warning and/or other mode change when the wind speed exceeds the warning and maximum wind-speed threshold values. The relevant parameters are listed in the table below.
| Parameter | 설명 |
|---|---|
| COM_WIND_MAX | Wind speed threshold that triggers failsafe action, in m/s (COM_WIND_MAX_ACT). |
| COM_WIND_MAX_ACT | High wind failsafe action (following COM_WIND_MAX trigger). Can be set to: 0: None (Default), 1: Warning, 2: Hold, 3: Return, 4: Terminate, 5: Land. |
| COM_WIND_WARN | Wind speed threshold that triggers periodic failsafe warning. |
고장 감지기
The failure detector allows a vehicle to take protective actions if it unexpectedly flips, detects a motor failure, or if it is notified by an external failure detection system.
During flight, the failure detector can be used to trigger flight termination if failure conditions are met, which may then launch a parachute or perform some other action.
INFO
Acting on a detected failure during flight is deactivated by default (enable by setting the parameter: CBRK_FLIGHTTERM=0).
During takeoff the failure detector attitude trigger invokes the disarm action if the vehicle flips (disarm kills the motors but, unlike flight termination, will not launch a parachute or perform other failure actions). Note that this check is always enabled on takeoff, irrespective of the CBRK_FLIGHTTERM parameter.
The failure detector is active in all vehicle types and modes, except for those where the vehicle is expected to do flips (i.e. Acro mode (MC), Acro mode (FW), and Manual (FW)).
Altitude Loss Trigger
PX4 v1.18 MC, VTOL onlyThe failure detector can be configured to trigger if a rotary-wing vehicle loses too much altitude below its commanded setpoint while in an altitude-controlled flight mode (such as Position mode or Altitude mode).
If the vehicle descends more than FD_ALT_LOSS meters below the setpoint, flight termination is triggered, which may deploy a parachute.
| Parameter | 설명 |
|---|---|
| FD_ALT_LOSS | Altitude loss threshold (m). Flight termination is triggered when the vehicle drops this far below the setpoint. 비활성화 하려면 0으로 설정하십시오. |
| FD_ALT_LOSS_T | Time (s) the vehicle must remain below the threshold before flight termination is triggered. |
자세 감지기
기체의 자세가 지정된 시간보다 오랫동안 사전 정의 된 피치 및 롤 값을 초과하는 경우 동작하도록 고장 감지기를 설정할 수 있습니다.
관련된 매개 변수는 다음과 같습니다.
| Parameter | 설명 |
|---|---|
| CBRK_FLIGHTTERM | 비행 종료 회로 차단기. 고장 감지기 또는 FMU 손실로 인한 비행 종료를 활성화하려면, 121212 (기본값)에서 설정을 해제합니다. |
| FD_FAIL_P | 최대 허용 피치 (도 단위). |
| FD_FAIL_R | 최대 허용 롤 (도 단위). |
| FD_FAIL_P_TTRI | Time to exceed FD_FAIL_P for failure detection (default 0.3s). |
| FD_FAIL_R_TTRI | Time to exceed FD_FAIL_R for failure detection (default 0.3s). |
Motor Failure Trigger
The failure detector can be configured to detect a motor failure while armed (and trigger an associated action) if the ESC current falls outside expected threshold for more than MOTFAIL_TIME seconds. Motor failures are non-latching: if the failure condition clears, the failure is cleared.
The undercurrent and overcurrent conditions are defined by:
undercurrent: {esc current} < {MOTFAIL_C2T} * {motor command [0,1]} - {MOTFAIL_OFF}
overcurrent: {esc current} > {MOTFAIL_C2T} * {motor command [0,1]} + {MOTFAIL_OFF}| Parameter | 설명 |
|---|---|
| FD_ACT_EN | Enable/disable the motor failure trigger completely. |
| MOTFAIL_C2T | Slope between normalized motor command [0–1] and expected steady-state current (FD_ACT_MOT_C2T at 100%) (A/%). |
| MOTFAIL_OFF | Under/over-current detection threshold offset (A). Added to the expected current to form the upper bound. Subtracted from the expected current to form the lower bound. |
| MOTFAIL_TIME | Hysteresis time (s) for which the current threshold must remain exceeded before a motor failure is triggered. |
| CA_FAILURE_MODE | Configure to not only warn about a motor failure but remove the first motor that detects a failure from the allocation effectiveness which turns off the motor and tries to operate the vehicle without it until disarming the next time. |
External Automatic Trigger System (ATS)
The failure detector, if enabled, can also be triggered by an external ATS system. The external trigger system must be connected to flight controller port AUX5 (or MAIN5 on boards that do not have AUX ports), and is configured using the parameters below.
INFO
External ATS is required by ASTM F3322-18. One example of an ATS device is the FruityChutes Sentinel Automatic Trigger System (SATS-MINI).
| Parameter | 설명 |
|---|---|
| FD_EXT_ATS_EN | Enable PWM input on AUX5 or MAIN5 (depending on board) for engaging failsafe from an external automatic trigger system (ATS). Default: Disabled. |
| FD_EXT_ATS_TRIG | The PWM threshold from external automatic trigger system for engaging failsafe. Default: 1900 ms. |
Mission Feasibility Checks
A number of checks are run to ensure that a mission can only be started if it is feasible. For example, the checks ensures that the first waypoint isn't too far away, and that the mission flight path doesn't conflict with any geofences.
As these are not strictly speaking "failsafes" they are documented in Mission Mode (FW) > Mission Feasibility Checks and Mission Mode (MC) > Mission Feasibility Checks.
Emergency Switches
Remote control switches can be configured (as part of QGroundControl Flight Mode Setup) to allow you to take rapid corrective action in the event of a problem or emergency; for example, to stop all motors, or activate Return mode.
This section lists the available emergency switches.
Kill Switch
A kill switch immediately stops all motor outputs — if flying, the vehicle will start to fall!
The motors will restart if the switch is reverted within 5 seconds, after which the vehicle will automatically disarm, and you will need to arm it again in order to start the motors.
INFO
There is also a Kill Gesture, which cannot be reverted.
Arm/Disarm Switch
The arm/disarm switch is a direct replacement for the default stick-based arming/disarming mechanism (and serves the same purpose: making sure there is an intentional step involved before the motors start/stop). It might be used in preference to the default mechanism because:
- Of a preference of a switch over a stick motion.
- It avoids accidentally triggering arming/disarming in-air with a certain stick motion.
- There is no delay (it reacts immediately).
The arm/disarm switch immediately disarms (stop) motors for those flight modes that support disarming in flight. This includes:
- Manual mode
- Acro mode
- Stabilized
For modes that do not support disarming in flight, the switch is ignored during flight, but may be used after landing is detected. This includes Position mode and autonomous modes (e.g. Mission, Land etc.).
INFO
Auto disarm timeouts (e.g. via COM_DISARM_LAND) are independent of the arm/disarm switch - ie even if the switch is armed the timeouts will still work.
Return Switch
A return switch can be used to immediately engage Return mode.
Kill Gesture
A kill gesture immediately stops all motor outputs — if flying, the vehicle will start to fall!
The action cannot be reverted without a reboot (this differs from a Kill Switch, where the operation can be reverted within 5 seconds).
| Parameter | 설명 |
|---|---|
| MAN_KILL_GEST_T | Time to hold sticks in gesture position before killing the motors. Default: -1 seconds (Disabled). |
Arming/Disarming Settings
The commander module has a number of parameters prefixed with COM_ARM that configure whether the vehicle can arm at all, and under what conditions (note that some parameters named with the prefix COM_ARM are used to arm other systems). Parameters prefixed with COM_DISARM_ affect disarming behaviour.
Auto-Disarming Timeouts
You can set timeouts to automatically disarm a vehicle if it is too slow to takeoff, and/or after landing (disarming the vehicle removes power to the motors, so the propellers won't spin).
The relevant parameters are shown below:
| Parameter | 설명 |
|---|---|
| COM_DISARM_LAND | Timeout for auto-disarm after landing. |
| COM_DISARM_PRFLT | Timeout for auto disarm if vehicle is too slow to takeoff. |
Arming Pre-Conditions
These parameters can be used to set conditions that prevent arming.
| Parameter | 설명 |
|---|---|
| COM_ARMABLE | Enable arming (at all). 0: Disabled, 1: Enabled (default). |
| COM_ARM_BAT_MIN | Minimum battery level for arming. 0: Disabled (default). Values: 0-0.9, |
| COM_ARM_WO_GPS | Enable arming without GPS. 0: Disabled, 1: Enabled (default). |
| COM_ARM_MIS_REQ | Require valid mission to arm. 0: Disabled (default), 1: Enabled . |
| COM_ARM_AUTH_REQ | Requires arm authorisation from an external (MAVLink) system. Flag to allow arming (at all). 1: Enabled, 0: Disabled (default). Associated configuration parameters are prefixed with COM_ARM_AUTH_. |
| COM_ARM_ODID | Remote ID arming check and in-flight failsafe. 0: Disabled (default), 1: Warning only, 2: Error only, 3: Return, 4: Land, 5: Terminate. See Remote ID Failsafe. |
In addition there are a number of parameters that configure system and sensor limits that make prevent arming if exceeded: COM_CPU_MAX, COM_ARM_IMU_ACC, COM_ARM_IMU_GYR, COM_ARM_MAG_ANG, COM_ARM_MAG_STR.