비행 컨트롤러(FC) 장착
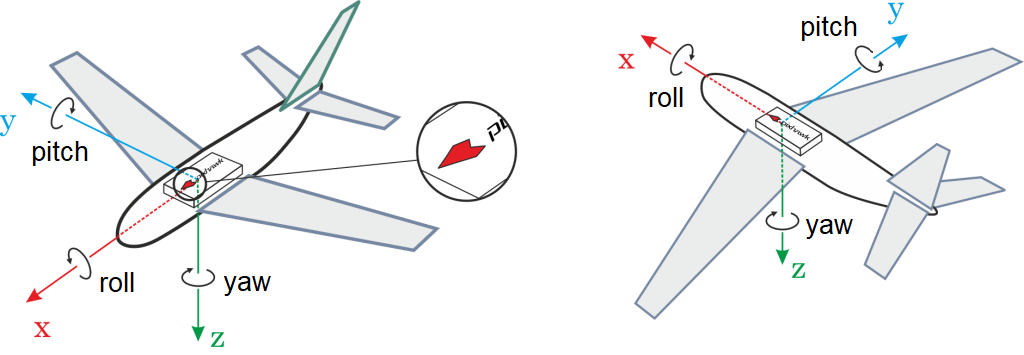
The flight controller should be placed on the frame as close as possible to the centre-of-gravity (CoG), top-side up, and oriented so that the heading mark arrow points towards the front of the vehicle. Vibration isolation is often needed, and you should follow the manufacturer recommendations. If mounted in this way, no further PX4 configuration is required.
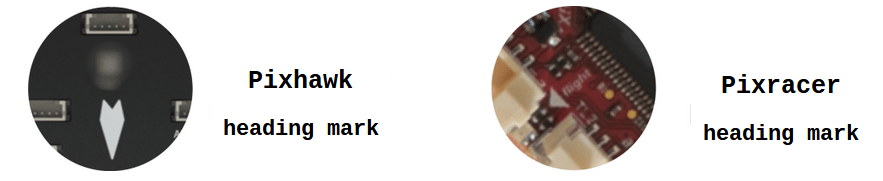
방향
Almost all Flight Controllers have a heading mark arrow (shown below). 기체의 상향으로 콘트롤러의 화살표가 전방을 향하도록 장착합니다. 고정익, 멀티콥터, VTOL, 지상 운송체 등의 차량에 동일하게 적용됩니다.
INFO
If the controller cannot be mounted in the recommended/default orientation due to physical constraints, you will need to configure the autopilot software with the orientation that you actually used: Flight Controller Orientation.
Position
The flight controller should be placed on the frame as close as possible to the centre-of-gravity.
If you can't mount the controller in this position, then you should configure the following parameters to set offset relative to the CoG: EKF2_IMU_POS_X, EKF2_IMU_POS_Y, EKF2_IMU_POS_Z (for the default EKF2 estimator).
Note that if you don't set these offsets then EKF2 position/velocity estimates will be at the IMU location rather that at the CoG. This may result in undesirable oscillations, depending on how far away the IMU is from the CoG.
Details
Explanation To understand the impact of not setting these offsets, consider the case when the flight controller (IMU) is in front of the CoG, you're flying in position mode, and there is a forward pitching motion around the CoG. The altitude estimate will go down, because the IMU has in fact moved down. As a reaction, the altitude controller will give more thrust to compensate. The amplitude depends on how far the IMU is located from the CoG. It might be negligible, but it is still some unneeded control effort that is constantly applied. If the offsets are specified, a pure pitch motion would not create any change in the altitude estimate so there will be less parasitic corrections.
진동 방지
비행 콘트롤러에 장착된 가속 센서나 자이로 회전 센서는 진동에 매우 민감합니다. Some boards include in-built vibration-isolation, while others come with mounting foam that you can use to isolate the controller from the vehicle.
 Vibration damping foam
Vibration damping foam
콘트롤러 문서에서 추천 방법으로 장착하는 것이 제일 좋습니다.
TIP
Log Analysis using Flight Review > Vibration explains how to test whether vibration levels are acceptable, and Vibration Isolation suggests a number of possible solutions if there is a problem.