거리 센서 (거리 측정기)
Distance sensors provide distance measurement that can be used for terrain following, terrain holding (i.e. precision hovering for photography), improved landing behaviour (conditional range aid), warning of regulatory height limits, collision prevention, etc.
This section lists the distance sensors supported by PX4 (linked to more detailed documentation), and provides information about the generic configuration required for all rangefinders, testing, and simulation with Gazebo or Gazebo-Classic. 보다 자세한 설정과 정보는 아래 링크(및 사이드 바)를 참고하십시오.



지원되는 거리 측정기
TIP
This is a subset of the rangefinders that can be used with PX4. Modules: Distance Sensors lists PX4 drivers for other non-CAN rangefinders. There may also be other DroneCAN rangefinders than those listed here.
| Rangefinder | Technology | Range (min – max) | 연결 | NDAA | 참고 |
|---|---|---|---|---|---|
| Ainstein US-D1 Standard Radar Altimeter | Microwave radar | ~50 m | UART | ✔️ | |
| ARK DIST SR | ToF (850 nm IR) | 8 cm to ~30 m | DroneCAN, UART | ✔️ | |
| ARK DIST MR | ToF (IR) | 8 cm to ~50 m | DroneCAN, UART | ✔️ | |
| Benewake TFmini | ToF (IR laser) | ~12 m | UART | ~ | |
| Holybro ST VL53L1X Lidar | ToF (IR) | up to ~4 m | I2C | ~ | |
| LeddarOne | ToF (IR) | 1 cm – 40 m | UART | ~ | |
| Lidar-Lite | ToF (IR laser) | 5 cm – 40 m | I2C, PWM | ~ | |
| LightWare SF11/C | ToF (IR laser) | up to ~120 m | UART, I2C | ~ | |
| LightWare LW20/C | ToF (IR laser) | up to ~100 m | I2C | ~ | Waterproof (IP67) + servo |
| LightWare SF45/B | ToF (IR laser) | ~50 m | UART | ~ | Rotary lidar (collision prevention) |
| MaxBotix I2CXL-MaxSonar-EZ | Ultrasonic | I2C | ~ | ||
| RaccoonLab Cyphal & DroneCAN µRANGEFINDER | ToF (IR) | ~0.1 m – ~8 m | DroneCAN, Cyphal | ~ | |
| Sony AS-DT1 | ToF | up to 40 m | UART | ~ | Multipoint distance sensor |
| TeraRanger Evo 60 m | ToF (IR) | 0.5 m – 60 m | I2C | ~ | |
| TeraRanger Evo 600Hz | ToF (IR) | 0.75 m – 8 m | I2C | ~ | High update rate (600 Hz) |
| LightWare SF02 (disc.) | ToF (IR laser) | ~50 m | UART | ~ | Discontinued |
| LightWare SF10/A (disc.) | ToF (IR laser) | ~25 m | UART, I2C | ~ | Discontinued |
| LightWare SF10/B (disc.) | ToF (IR laser) | ~50 m | UART, I2C | ~ | Discontinued |
| LightWare SF10/C (disc.) | ToF (IR laser) | ~100 m | UART, I2C | ~ | Discontinued |
| Lanbao PSK-CM8JL65-CC5 (disc.) | ToF (IR) | 0.17 m – 8 m | UART | ✖️ | Discontinued |
| TeraRanger One (disc.) | ToF (IR) | ~0.2 m – ~14 m (typical) | I2C (adapter required) | ~ | Discontinued |
These adaptors allows you to connect a non-CAN rangefinder via the CAN interface. Note that the range depends on the connected rangefinder
| Adaptor | 연결 | NDAA |
|---|---|---|
| Avionics Anonymous UAVCAN Laser Altimeter Interface | DroneCAN | ~ |
| RaccoonLab Cyphal & DroneCAN Rangefinder Adapter | DroneCAN, Cyphal | ~ |
Note that some Optical Flow sensors also include a rangefinder, such as ARK Flow and ARK Flow MR.
ARK DIST SR & ARK DIST MR
ARK DIST SR and ARK DIST MR are open-source Time-of-Flight (ToF) rangefinder modules, which are capable of measuring distances from 8cm to 30m and from 8cm to 50m, respectively.
The sensors support DroneCAN, run PX4 DroneCAN Firmware, and are packed into a tiny form factor. They can be connected to a flight controller via its CAN1 port, allowing additional sensors to connected through the CAN2 port.
Holybro ST VL53L1X Lidar
The VL53L1X is a state-of-the-art, Time-of-Flight (ToF), laser-ranging sensor, enhancing the ST FlightSense™ product family. 최대 4m의 정확한 범위와 최대 50Hz의 빠른 범위 주파수를 제공하는 시장에서 가장 빠른 소형 ToF 센서입니다.
It comes with a JST GHR 4 pin connector that is compatible with the I2C port on Pixhawk 4, Pixhawk 5X, and other flight controllers that follow the Pixhawk Connector Standard.
Lidar-Lite
Lidar-Lite is a compact, high-performance optical distant measurement rangefinder. It has a sensor range from (5cm - 40m) and can be connected to either PWM or I2C ports.
MaxBotix I2CXL-MaxSonar-EZ
The MaxBotix I2CXL-MaxSonar-EZ range has a number of relatively short-ranged sonar based rangefinders that are suitable for assisted takeoff/landing and collision avoidance. These can be connected using an I2C port.
The rangefinders are enabled using the parameter SENS_EN_MB12XX.
Lightware LIDARs
Lightware SFxx Lidar provide a broad range of lightweight “laser altimeters” that are suitable for many drone applications.
PX4 supports: SF11/c and SF/LW20. PX4 can also be used with the following discontinued models: SF02, SF10/a, SF10/b, SF10/c.
Others may be supported via the RaccoonLab Cyphal and DroneCAN Rangefinder Adapter described below.
PX4 also supports the LightWare LiDAR SF45 Rotating Lidar for collision prevention applications.
Sony AS-DT1
Sony AS-DT1 is a multipoint distance sensor that connects to PX4 over a UART/serial port. PX4 configures the sensor baud rate and measurement output from the driver.
TeraRanger 거리계
TeraRanger provide a number of lightweight distance measurement sensors based on infrared Time-of-Flight (ToF) technology. They are typically faster and have greater range than sonar, and smaller and lighter than laser-based systems.
PX4 supports the following models connected via the I2C bus: TeraRanger One, TeraRanger Evo 60m and TeraRanger Evo 600Hz.
Ainstein US-D1 Standard Radar Altimeter
The Ainstein US-D1 Standard Radar Altimeter is compact microwave rangefinder that has been optimised for use on UAVs. It has a sensing range of around 50m. A particular advantages of this product are that it can operate effectively in all weather conditions and over all terrain types (including water).
LeddarOne
LeddarOne is small Lidar module with a narrow, yet diffuse beam that offers excellent overall detection range and performance, in a robust, reliable, cost-effective package. 감지 범위는 1cm ~ 40m이며 UART/직렬 버스로 연결합니다.
TFmini
The Benewake TFmini Lidar is a tiny, low cost, and low power LIDAR with 12m range.
PSK-CM8JL65-CC5
DiscontinuedThe Lanbao PSK-CM8JL65-CC5 ToF Infrared Distance Measuring Sensor is a very small (38 mm x 18mm x 7mm, <10g) IR distance sensor with a 0.17m-8m range and millimeter resolution. UART/직렬 버스에 연결됩니다.
Avionics Anonymous UAVCAN Laser Altimeter Interface
The Avionics Anonymous UAVCAN Laser Altimeter Interface allows several common rangefinders (e.g. Lightware SF11/c, SF30/D, etc) to be connected to the CAN bus via DroneCAN, a more robust interface than I2C.
RaccoonLab Cyphal and DroneCAN Rangefinder Adapter
The RaccoonLab Cyphal and DroneCAN Rangefinder Adapter allows several common rangefinders to be connected to the CAN bus via Cyphal or DroneCAN, providing a more robust interface than I2C or UART. This adapter efficiently reads measurements via I2C or UART and publishes range data in meters, making it a versatile solution for UAVs, robotics, and technical documentation applications.
Supported rangefinders include:
- LightWare LW20/C
- TF-Luna
- Garmin Lite V3
- VL53L1CB
RaccoonLab Cyphal and DroneCAN µRANGEFINDER
RaccoonLab µRANGEFINDER is designed to measure distance and publish it via Cyphal/DroneCAN protocols. It can be used to estimate precision landing or object avoidance.
Features:
- VL53L1CBV0FY-1 sensor
- Input voltage sensor
- CAN connectors: 2 UCANPHY Micro (JST-GH 4).
Configuration/Setup
Rangefinders are usually connected to either a serial (PWM) or I2C port (depending on the device driver), and are enabled on the port by setting a particular parameter.
The hardware and software setup that is specific to each distance sensor is covered in their individual topics.
The generic configuration that is common to all distance sensors, covering both the physical setup and usage, is given below.
Generic Configuration
The common rangefinder configuration is specified using EKF2_RNG_* parameters. These include (non exhaustively):
- EKF2_RNG_POS_X, EKF2_RNG_POS_Y, EKF2_RNG_POS_Z - offset of the rangefinder from the vehicle centre of gravity in X, Y, Z directions.
- EKF2_RNG_PITCH - A value of 0 degrees (default) corresponds to the range finder being exactly aligned with the vehicle vertical axis (i.e. straight down), while 90 degrees indicates that the range finder is pointing forward. Simple trigonometry is used to calculate the distance to ground if a non-zero pitch is used.
- EKF2_RNG_DELAY - approximate delay of data reaching the estimator from the sensor.
- EKF2_RNG_SFE - Range finder range dependent noise scaler.
- EKF2_RNG_NOISE - Measurement noise for range finder fusion
시험
The easiest way to test the rangefinder is to vary the range and compare to the values detected by PX4. The sections below show some approaches to getting the measured range.
QGroundControl MAVLink Inspector
The QGroundControl MAVLink Inspector lets you view messages sent from the vehicle, including DISTANCE_SENSOR information from the rangefinder. The main difference between the tools is that the Analyze tool can plot values in a graph.
INFO
The messages that are sent depend on the vehicle configuration. You will only get DISTANCE_SENSOR messages if the connected vehicle has a rangefinder installed and is publishing sensor values.
To view the rangefinder output:
Open the menu Q > Select Tool > Analyze Tools:
Select the message
DISTANCE_SENSOR, and then check the plot checkbox againstcurrent_distance. The tool will then plot the result: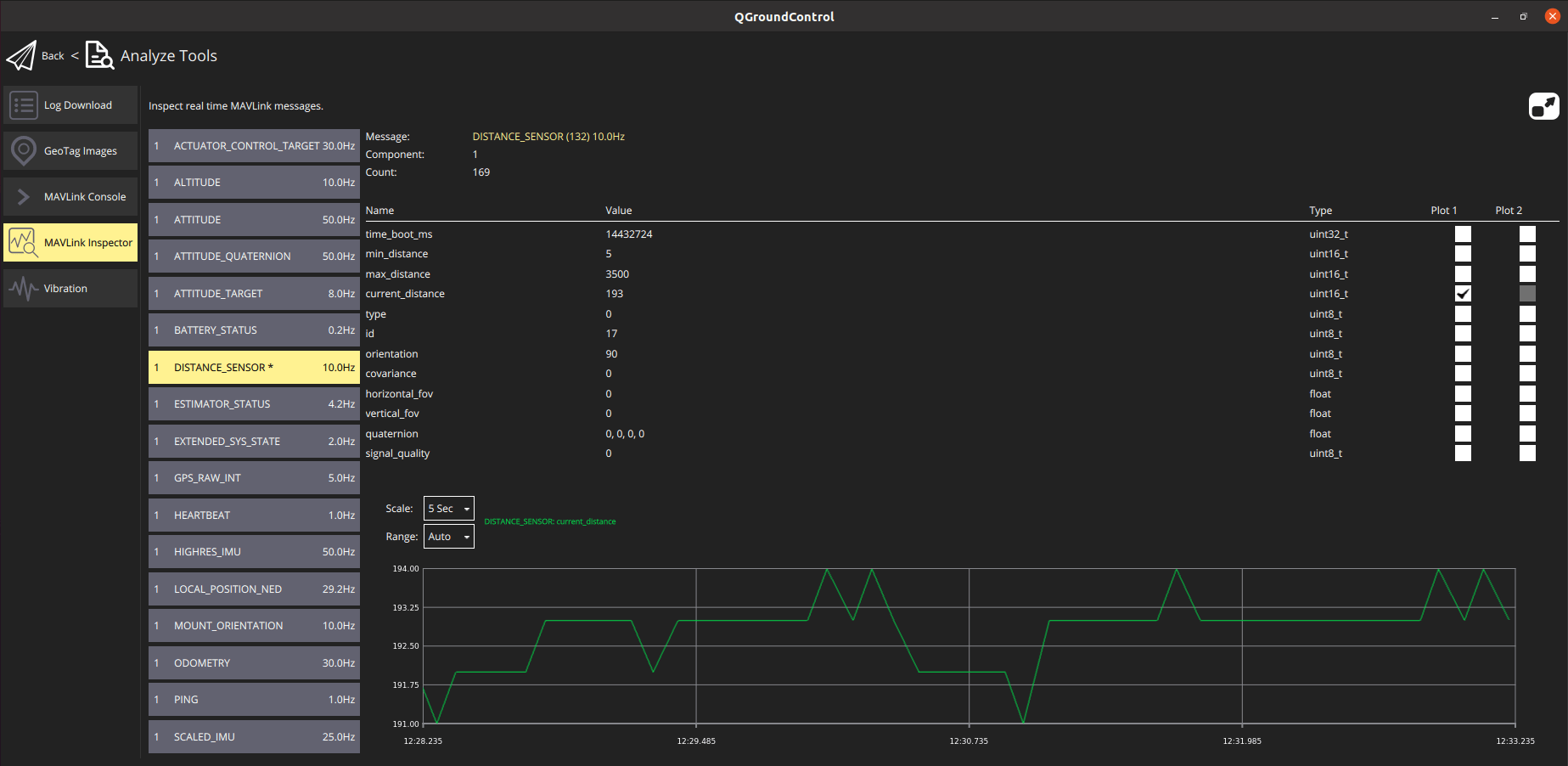
QGroundControl MAVLink Console
You can also use the QGroundControl MAVLink Console to observe the distance_sensor uORB topic:
listener distance_sensor 5INFO
The QGroundControl MAVLink Console works when connected to Pixhawk or other NuttX targets, but not the Simulator. On the Simulator you can run the commands directly in the terminal.
For more information see: Development > Debugging/Logging > Sensor/Topic Debugging using the Listener Command.
시뮬레이션
Gazebo Simulation
Lidar and sonar rangefinders can be used in the Gazebo simulator. To do this you must start the simulator using a vehicle model that includes the rangefinder.
Downward facing sensors that write to the DistanceSensor UORB topic can be used to test use cases such as landing and terrain following:
Quadrotor(x500) with 1D LIDAR (Down-facing)
shmake px4_sitl gz_x500_lidar_down
Front-facing sensors that write to ObstacleDistance can be used to test Collision Prevention:
- sh
make px4_sitl gz_x500_lidar_2d Quadrotor(x500) with 1D LIDAR (Front-facing)
shmake px4_sitl gz_x500_lidar_front
Gazebo-Classic Simulation
Lidar and sonar rangefinders can be used in the Gazebo Classic simulator. To do this you must start the simulator using a vehicle model that includes the rangefinder.
The iris optical flow model includes a Lidar rangefinder:
make px4_sitl gazebo-classic_iris_opt_flowThe typhoon_h480 includes a sonar rangefinder:
make px4_sitl gazebo-classic_typhoon_h480If you need to use a different vehicle you can include the model in its configuration file. You can see how in the respective Iris and Typhoon configuration files:
- xml
<include> <uri>model://lidar</uri> <pose>-0.12 0 0 0 3.1415 0</pose> </include> <joint name="lidar_joint" type="revolute"> <child>lidar::link</child> <parent>iris::base_link</parent> <axis> <xyz>0 0 1</xyz> <limit> <upper>0</upper> <lower>0</lower> </limit> </axis> </joint> - xml
<include> <uri>model://sonar</uri> </include> <joint name="sonar_joint" type="revolute"> <child>sonar_model::link</child> <parent>typhoon_h480::base_link</parent> <axis> <xyz>0 0 1</xyz> <limit> <upper>0</upper> <lower>0</lower> </limit> </axis> </joint>