고도 모드 (멀티콥터)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
")
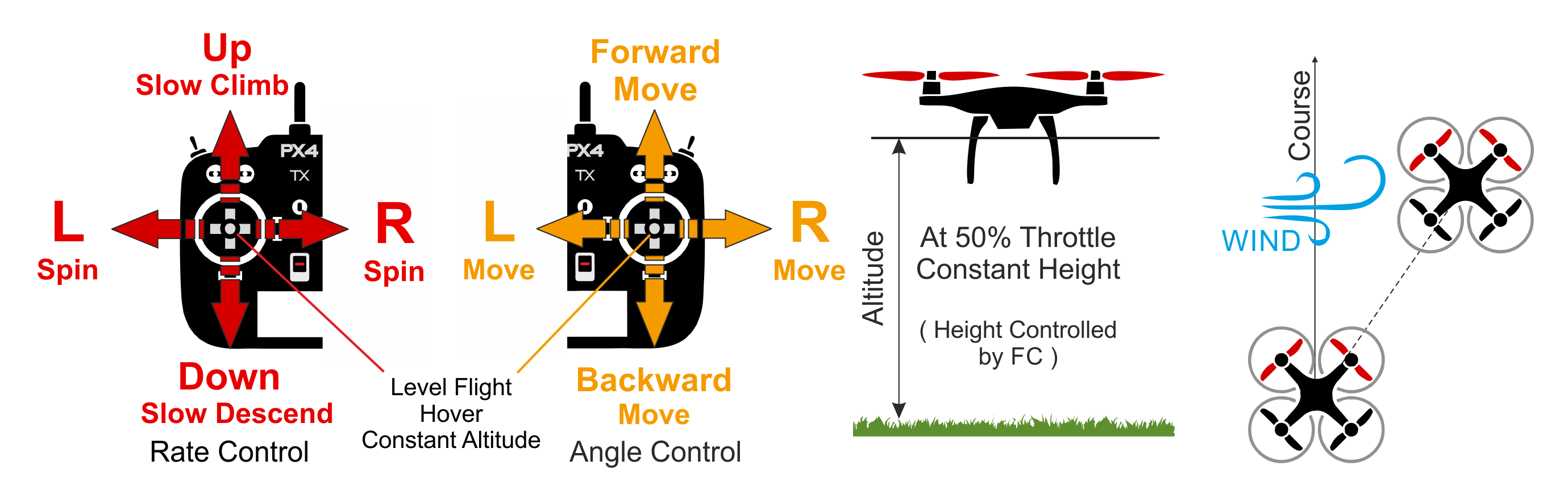
Altitude mode is a relatively easy-to-fly RC mode in which roll and pitch sticks control vehicle movement in the left-right and forward-back directions (relative to the "front" of the vehicle), yaw stick controls rate of rotation over the horizontal plane, and throttle controls speed of ascent-descent.
When the sticks are released/centered the vehicle will level and maintain the current altitude. 수평면에서 이동하는 경우 차량은 바람 저항에 의해 모멘텀이 소실 될 때까지 계속됩니다. 바람이 불면 기체는 바람의 방향으로 표류합니다.
TIP
Altitude mode is the safest non-GPS manual mode for new fliers. It is just like Stabilized mode but additionally locks the vehicle altitude when the sticks are released.
The diagram below shows the mode behaviour visually (for a mode 2 transmitter).
Technical Summary
RC/manual mode like Stabilized mode but with altitude stabilization (centred sticks level vehicle and hold it to fixed altitude). The horizontal position of the vehicle can move due to wind (or pre-existing momentum).
- Centered sticks:
- RPY sticks levels vehicle.
- 스로틀(~ 50 %)은 현재 고도를 바람에 대해 일정하게 유지합니다.
- Outside center:
- 롤/피치 스틱은 각각의 방향에서 틸트 각도를 제어하여 해당하는 좌우와 전후 방향으로 이동합니다.
- 스로틀 스틱은 미리 정해진 최대 속도 (및 다른 축의 이동 속도)로 속도를 올리거나 내립니다.
- 요 스틱은 수평면 위의 회전 각속도를 제어합니다.
- 이륙:
- 착륙했을 때 스로틀 스틱을 62.5 % (하단에서 전체 범위) 이상으로 올리면 기체가 이륙합니다.
- Altitude is normally measured using a barometer, which may become inaccurate in extreme weather conditions. LIDAR/거리 센서가 장착된 기체는 높은 정확도로 고도를 제어할 수 있습니다.
- Manual control input is required (such as RC control, joystick).
- Roll, Pitch: Assistance from autopilot to stabilize the attitude. Position of RC stick maps to the orientation of vehicle.
- Throttle: Assistance from autopilot to hold position against wind.
- Yaw: Assistance from autopilot to stabilize the attitude rate. Position of RC stick maps to the rate of rotation of vehicle in that orientation.
매개변수
The mode is affected by the following parameters:
| Parameter | 설명 |
|---|---|
| MPC_Z_VEL_MAX_UP | 최대 수직 상승 속도. 기본값: 3 m/s. |
| MPC_Z_VEL_MAX_DN | 최대 수직 하강 속도. 기본값: 1 m/s. |
MPC_XXXX | 대부분의 MPC_xxx 매개 변수는이 모드에서 비행 동작에 어느정도 영향을 미칩니다 . For example, MPC_THR_HOVER defines the thrust at which a vehicle will hover. |