E-flite Convergence 틸트로터 VTOL (Pixfalcon)
The E-Flite Convergence can easily be converted to a fully autonomous VTOL with PX4. There is not much space but it's enough for a Pixfalcon flight controller with GPS and telemetry.
INFO
The original Horizon Hobby E-Flite Convergence frame and Pixfalcon have been discontinued. Alternatives are provided in the Purchase section.
구매처
차량 프레임 옵션:
- WL Tech XK X450 - AliExpress
- JJRC M02 - Banggood (AU), AliExpress
비행 컨트롤러 옵션():
- Pixhawk 4 Mini
- Holybro Pixhawk Mini.
- 충분히 작은 폼 팩터를 가진 다른 호환 가능한 비행 콘트롤러.
하드웨어 설정
The vehicle needs 7 PWM signals for the motors and control surfaces:
- Motor (left/right/back)
- Tilt servos (right/left)
- Elevons (left/right)
These can be wired to flight controller outputs more-or-less in any way you want (though outputs for motors should be grouped together, and so on).
The outputs are configured in the Actuators Configuration by following the instructions for VTOL tiltrotor geometry and output configuration. Note that you will need to start from the Generic Tiltrotor VTOL frame.
Note that left and right in the configuration screen and frame reference are defined from the perspective of a human pilot inside a real plane (or looking from above, as shown below):

비행 콘트롤러
비행 콘트롤러는 원래 자동조종장치가 있던 동일한 위치에 장착할 수 있습니다.
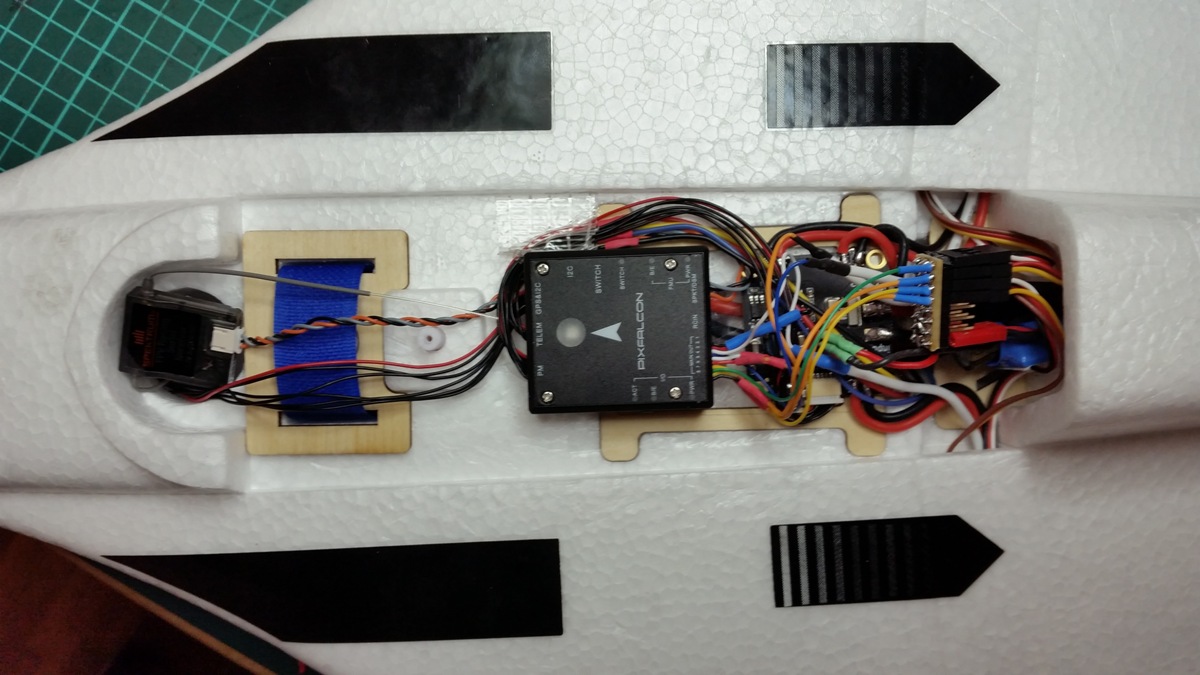
텔레메트리
텔레메트리 모듈은 FPV 전송 기어를 고정하기 위한 베이에 장착합니다.
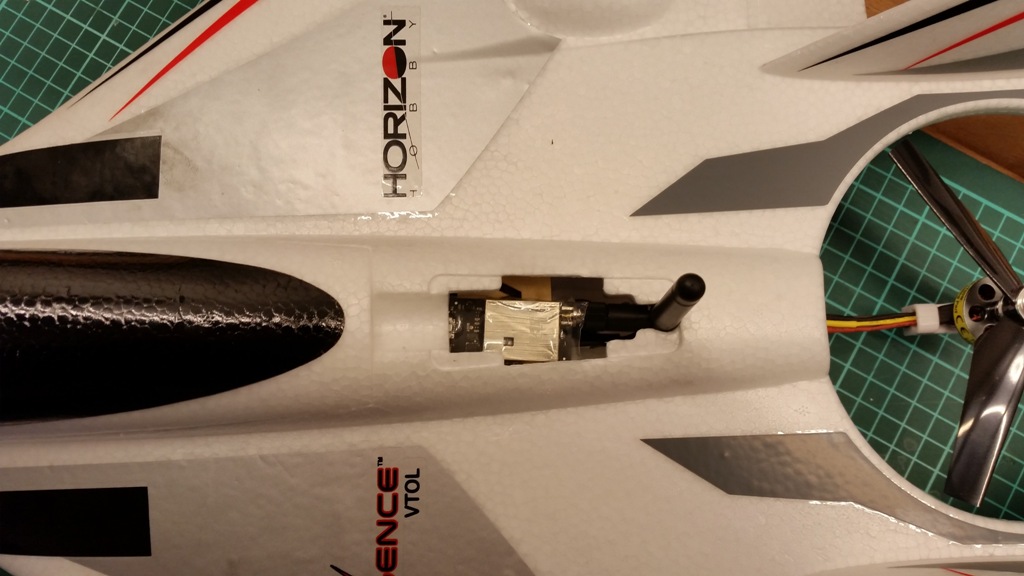
GPS
GPS 장착을 위하여 "조종실" 내부의 발포 재질 부분을 잘라냈습니다. 그렇게 하면 GPS를 차체 내부에 넣을 수 있고, 차량 외관을 손상시키지 않으면서 멋지게 수납할 수 있습니다.

PX4 설정
Follow the Standard Configuration in QGroundControl (radio, sensors, flight modes, etc.).
이 기체와 관련된 특정 설정은 다음과 같습니다.
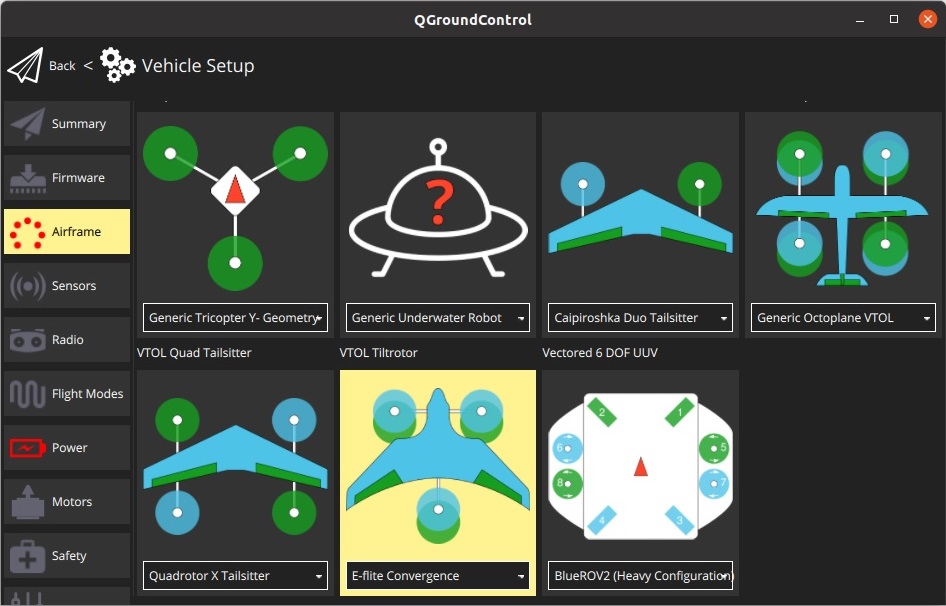
- Airframe
- Select the airframe configuration E-flite Convergence under VTOL Tiltrotor and restart QGroundControl.
- Select the airframe configuration E-flite Convergence under VTOL Tiltrotor and restart QGroundControl.
- Flight Modes/Switches
- As this is a VTOL vehicle, you must assign an RC controller switch for transitioning between multicopter and fixed-wing modes.