Holybro Pixhawk 6X Wiring Quick Start
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
This quick start guide shows how to power the Pixhawk 6X® flight controller and connect its most important peripherals.
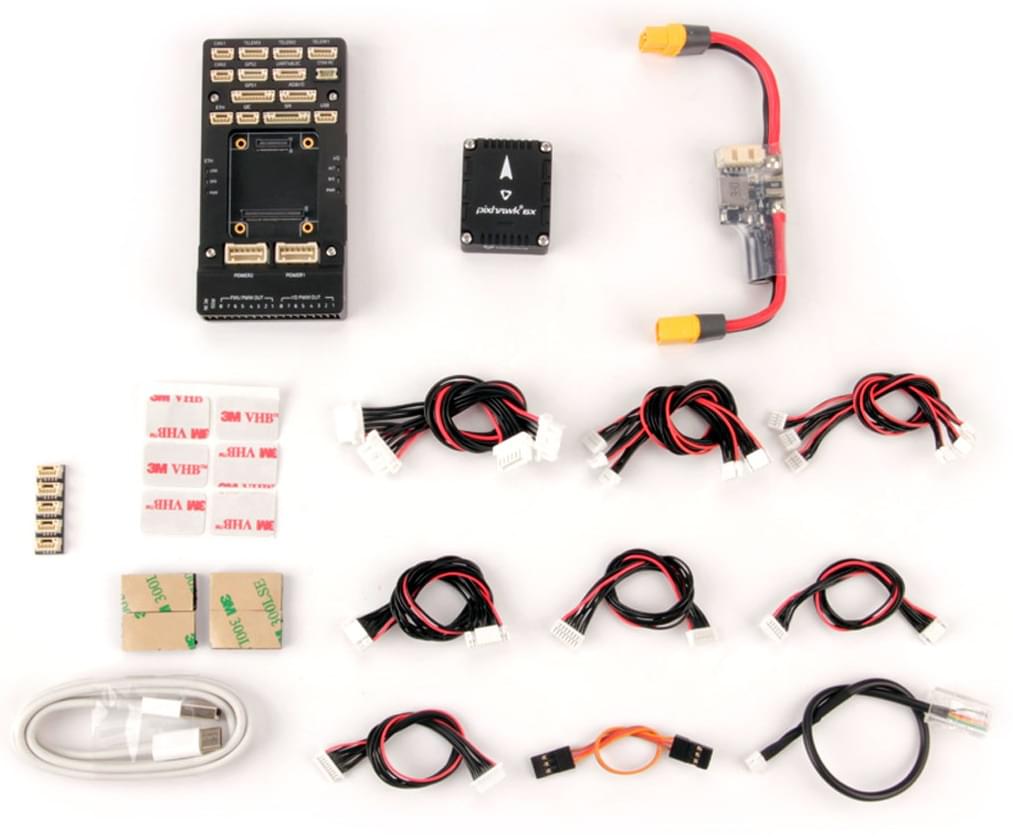
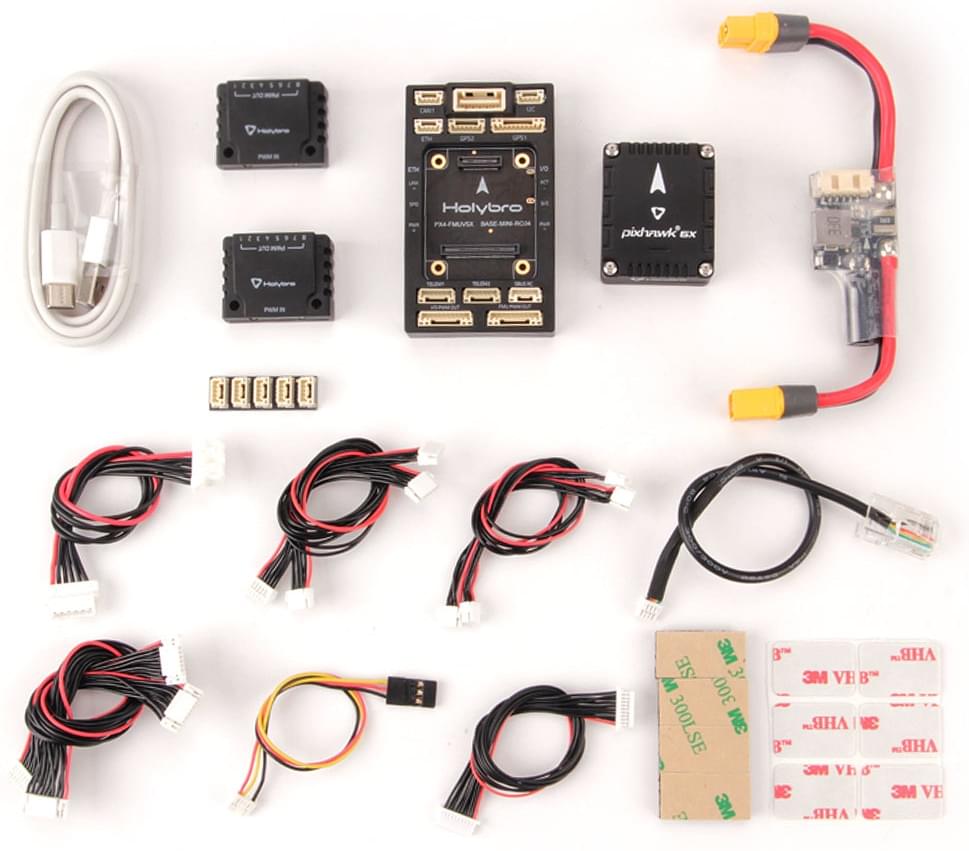
키트 내용물
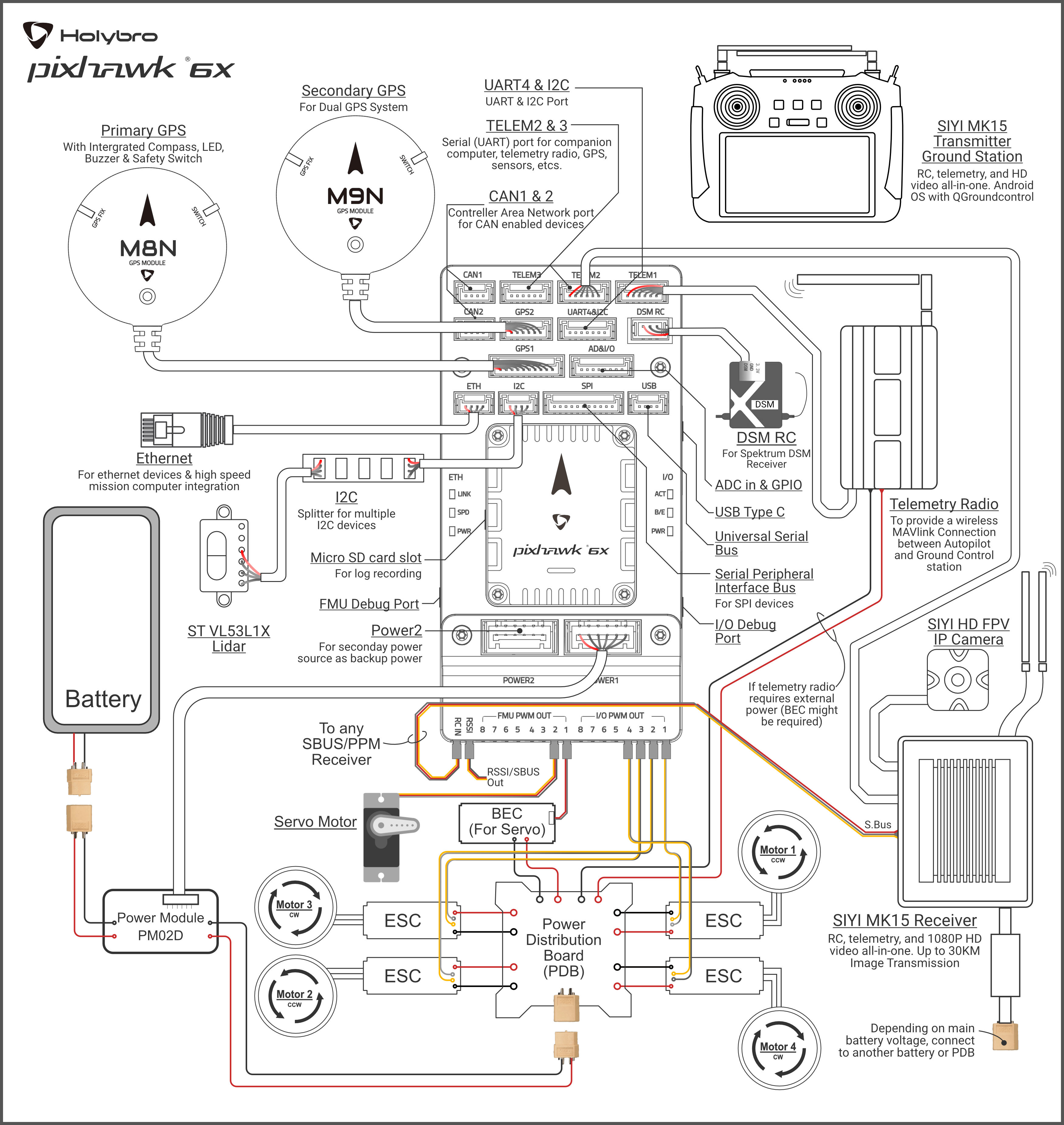
배선 개요
The image below is sample wiring diagram that shows how to connect the most important sensors and peripherals.
TIP
More information about available ports can be found here: Pixhawk 6X > Connections.
콘트롤러 장착 및 장착 방향
Pixhawk 6X can be mounted on the frame using double side tape included in the kit. 차량의 무게 중심에 최대한 가깝운 프레임에 장착하여야 하며, 화살표가 차량의 앞쪽과 위쪽을 향하도록 하여야 합니다.

INFO
If the controller cannot be mounted in the recommended/default orientation (e.g. due to space constraints) you will need to configure the autopilot software with the orientation that you actually used: Flight Controller Orientation.
GPS + 나침반 + 부저 + 안전 스위치 + LED
The Pixhawk6X Standard Set & Pixhawk6X Mini Set can be purchased with M8N or M9N GPS (10-pin connector) that should be connected to the GPS1 port. 이 GNSS 모듈에는 나침반, 안전 스위치, 부저 및 LED가 통합되어 있습니다.
A secondary M8N or M9N GPS (6-pin connector) can be purchased separately and connected to the GPS2 port.
The GPS/Compass should be mounted on the frame as far away from other electronics as possible, with the direction marker towards the front of the vehicle (separating the compass from other electronics will reduce interference).

INFO
The GPS module's integrated safety switch is enabled by default (when enabled, PX4 will not let you arm the vehicle). 비활성화하려면 안전 스위치를 1초간 길게 누르십시오. 안전 스위치를 다시 눌러 안전 장치를 활성화하고 기체 시동을 끌 수 있습니다. 조종기나 지상국 프로그램에서 기체 시동을 끌 수 없는 상황에서 유용합니다.
전원
Connect the output of the PM02D Power Module (PM board) that comes with the Standard Set to one of the POWER port of Pixhawk 6X using the 6-wire cable. The PM02D and Power ports on the Pixhawk 6X uses the 6 circuit 2.00mm Pitch CLIK-Mate Wire-to-Board PCB Receptacle & Housing.
The PM02D Power Module supports 2~6S battery, the board input should be connected to your LiPo battery. Note that the PM board does not supply power to the + and - pins of FMU PWM OUT and I/O PWM OUT.
If using a plane or rover, the FMU PWM-OUT will need to be separately powered in order to drive servos for rudders, elevons etc. This can be done by connecting the 8 pin power (+) rail of the FMU PWM-OUT to a voltage regulator (for example, a BEC equipped ESC or a standalone 5V BEC or a 2S LiPo battery).
INFO
The power rail voltage must be appropriate for the servo being used!
| PIN & Connector | 기능 |
|---|---|
| I/O PWM Out | 여기에 모터 신호와 GND 배선을 연결합니다. |
| FMU PWM Out | 여기에 서보 신호, 양극 및 GND 전선을 연결합니다. |
INFO
MAIN outputs in PX4 firmware map to I/O PWM OUT port of Pixhawk 6X whereas AUX outputs map to FMU PWM OUT of Pixhawk 6X. For example, MAIN1 maps to IO_CH1 pin of I/O PWM OUT and AUX1 maps to FMU_CH1 pin of FMU PWM OUT.
The pinout of Pixhawk 6X’s power ports is shown below. 전원 포트는 전압 및 전류 데이터를 위해 PM02D 전원 모듈에서 I2C 디지털 신호를 수신합니다. VCC 라인은 최소 3A 연속을 제공해야하며, 기본적으로 5.1V로 설정되어야 합니다. 5V 보다 낮은 전압은 권장되지 않습니다.
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2(black) | VCC | +5V |
| 3(black) | SCL | +3.3V |
| 4(black) | SDA | +3.3V |
| 5(black) | GND | GND |
| 6(black) | GND | GND |
무선 조종
A remote control (RC) radio system is required if you want to manually control your vehicle (PX4 does not require a radio system for autonomous flight modes).
You will need to select a compatible transmitter/receiver and then bind them so that they communicate (read the instructions that come with your specific transmitter/receiver).
- Spektrum/DSM receivers connect to the DSM/SBUS RC input.
- PPM or SBUS receivers connect to the RC IN input port.
PPM and PWM receivers that have an individual wire for each channel must connect to the RC IN port via a PPM encoder like this one (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: Remote Control Transmitters & Receivers.
무선 텔레메트리(선택 사항)
Telemetry radios may be used to communicate and control a vehicle in flight from a ground station (for example, you can direct the UAV to a particular position, or upload a new mission).
The vehicle-based radio should be connected to the TELEM1 port as shown below (if connected to this port, no further configuration is required). 다른 텔레메트리는 일반적으로 지상국 컴퓨터나 모바일 장치에 USB를 통하여 연결됩니다.
Radios are also available for purchase on Holybro's website .
SD 카드(선택 사항)
SD cards are highly recommended as they are needed to log and analyse flight details, to run missions, and to use UAVCAN-bus hardware. Insert the card (included in Pixhawk 6X) into Pixhawk 6X as shown below.

TIP
For more information see Basic Concepts > SD Cards (Removable Memory).
모터
Motors/servos are connected to the I/O PWM OUT (MAIN) and FMU PWM OUT (AUX) ports in the order specified for your vehicle in the Airframe Reference.
INFO
이 참고사항은 모든 지원되는 기체 프레임의 출력 포트의 모터/서보 연결 리스트입니다. 프레임이 참고사항에 기재되어 있지 않다면, 올바른 유형의 "일반" 프레임을 사용하십시오.
WARNING
The mapping is not consistent across frames (e.g. you can't rely on the throttle being on the same output for all plane frames). 가지고 있는 기체의 프레임에 대해 올바르게 모터를 제대로 연결하였는지 다시 한 번 확인하십시오.
기타 주변 장치
- Telemetry Radio Modules
- Rangefinders/Distance sensors
- Holybro Sensors
- Holybro GPS & RTK Systems
- Power Modules & PDBs
The wiring and configuration of optional/less common components is covered within the topics for individual peripherals.
핀배열
- Holybro Pixhawk Baseboard Pinout
- Holybro Pixhawk Mini-Baseboard Pinout
- Holybro Pixhawk Jetson Baseboard
- Holybro Pixhawk RPi CM4 Baseboard
설정
General configuration information is covered in: Autopilot Configuration.
QuadPlane specific configuration is covered here: QuadPlane VTOL Configuration
추가 정보
- Holybro Docs (Holybro)
- Pixhawk 6X (PX4 Doc Overview page)
- Pixhawk 6X Pro (PX4 Doc Overview page)
- Pixhawk Autopilot FMUv6X Standard.
- Pixhawk Autopilot Bus Standard.
- Pixhawk Connector Standard.