LightWare Lidar (SF1X/SF02/LW20/SF45/GRF250/GRF500)
LightWare는 UAV에 장착에 적합한 경량의 범용 레이저 고도계( "라이다")를 개발합니다. 지형 추적, 정밀 호버링 (예 : 사진 촬영), 규제 높이 제한 경고, 충돌 방지 감지 등에 사용됩니다.


지원 모델
아래의 모델들은 PX4에서 지원되며, I2C 또는 직렬 버스에 연결할 수 있습니다 (아래 표는 각 모델에 사용할 수 있는 버스를 나타냄).
| 모델 | 범위 (m) | 버스 | 설명 |
|---|---|---|---|
| SF11/C | 100 | 직렬 또는 I2C 버스 | |
| LW20/C | 100 | I2C 버스 | 감지 및 회피 애플리케이션을 위한 서보가 있는 방수 (IP67) |
| SF30/D | 200 | I2C 버스 | Waterproofed (IP67) |
| SF45/B | 50 | 직렬 | Rotary Lidar (Used for Collision Prevention) |
| GRF250 | 250 | 직렬 또는 I2C 버스 | Gimbal Range Finder |
| GRF500 | 500 | 직렬 또는 I2C 버스 | Gimbal Range Finder |
Details
Discontinued
The following models are supported by PX4 but are no longer available from the manufacturer.
| 모델 | 범위 | 버스 | |
|---|---|---|---|
| SF02 | 50 | 직렬 | |
| SF10/A | 25 | 직렬 또는 I2C 버스 | |
| SF10/B | 50 | 직렬 또는 I2C 버스 | |
| SF10/C | 100m | 직렬 또는 I2C 버스 | |
| LW20/B | 50 | I2C 버스 | 감지 및 회피 애플리케이션을 위한 서보가 있는 방수 (IP67) |
I2C 설정
I2C 포트에 연결 가능한 모델을 위의 표를 참고하십시오.
Lidar Configuration (SF11/C)
The SF11/C hardware (only) does not ship with Pixhawk I2C compatibility enabled by default. To enable support, you have to download LightWare Studio and got to Parameters > Communication and tick mark I2C compatibility mode (Pixhawk)
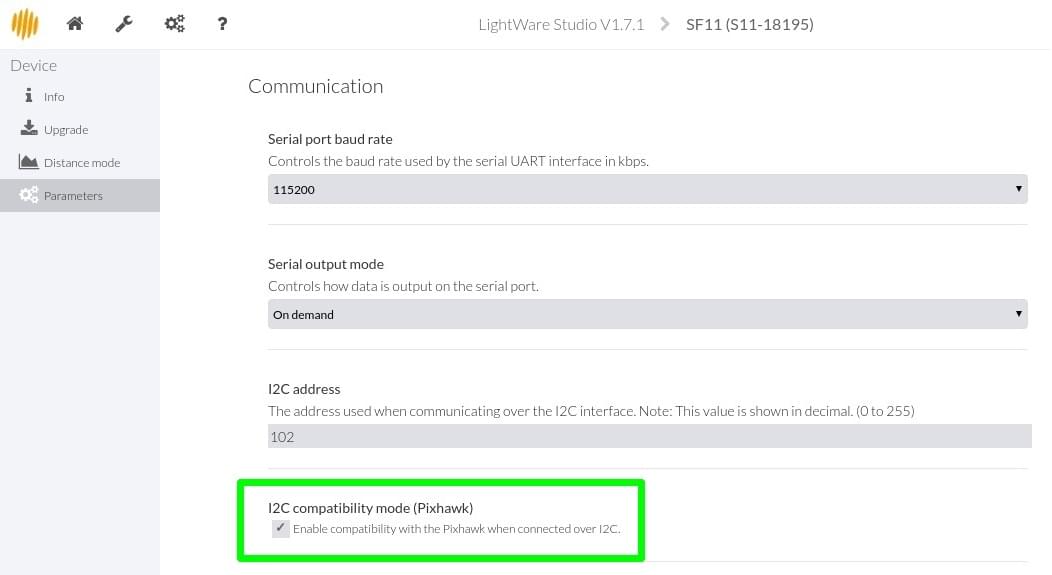
This step is not required for the other supported Lightware rangefinders.
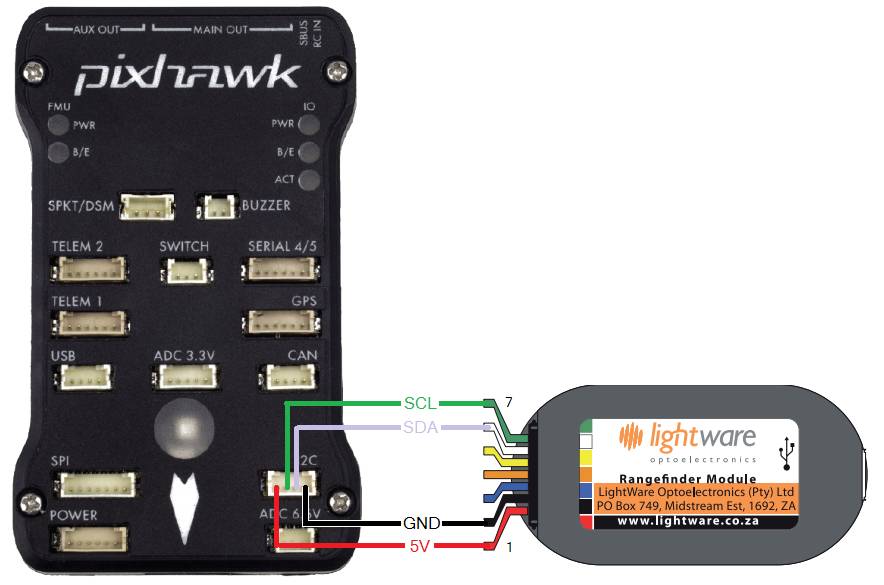
하드웨어
Connect the Lidar the autopilot I2C port as shown below (in this case, for the Pixhawk 1).
INFO
Some older revisions cannot be used with PX4. Specifically they may be miss-configured to have an I2C address equal to 0x55, which conflicts with rgbled module. On Linux systems you may be able to determine the address using i2cdetect. If the I2C address is equal to 0x66 the sensor can be used with PX4.
Parameter Setup
Set the SENS_EN_SF1XX parameter to match the rangefinder model and then reboot.
VTOL vehicles may choose to also set SF1XX_MODE to 2: Disabled during VTOL fast forward flight.
Serial Setup
TIP
SF45/B setup is covered in the linked document.
하드웨어
The lidar can be connected to any unused serial port (UART), e.g.: TELEM2, TELEM3, GPS2 etc.
Parameter Setup
Configure the serial port on which the lidar will run using SENS_SF0X_CFG. 포트 전송속도는 드라이버에 의해 설정되므로, 추가로 설정하지 않아도 됩니다.
INFO
If the configuration parameter is not available in QGroundControl then you may need to add the driver to the firmware.
Then set the SENS_EN_SF0X parameter to match the rangefinder model and reboot.
VTOL vehicles may choose to also set SF1XX_MODE to 2: Disabled during VTOL fast forward flight.