CUAV Nora 비행 컨트롤러
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
The Nora® flight controller is a high-performance autopilot. 산업용 드론과 대형 대형 드론에 적합합니다. 주로 상용 제조업체에 공급됩니다.
Nora는 CUAV X7의 변종입니다. 통합 마더 보드(소프트와 하드 보드)를 채택하여 비행 컨트롤러의 내부 커넥터를 줄이고 안정성을 높이며 모든 인터페이스를 측면에 배치하여 배선이 더 간결하여졌습니다.
INFO
This flight controller is manufacturer supported.
특징
- 내부 충격 흡수
- 통합 프로세스는 인터페이스 손상으로 인한 오류를 줄입니다.
- USB_HS 지원, 로그 다운로드 속도 향상(PX4는 아직 지원되지 않음)
- 더 많은 dshot 출력 지원
- IMU 가열 지원, 센서 작동 개선
- Dedicated CAN battery port
- IMU 센서 3 세트
- 자동차 등급 RM3100 나침반
- 고성능 프로세서
TIP
The manufacturer CUAV Docs are the canonical reference for Nora. 가장 정확한 최신 정보를 포함하고 있습니다.
요약
메인 FMU 프로세서: STM32H743
내장 센서 :
- 가속도계/자이로스코프 : ICM-20689
- 가속도계/자이로스코프 : ICM-20649
- 가속도계/자이로스코프 : BMI088
- 자력계 : RM3100
- Barometer: MS5611*2
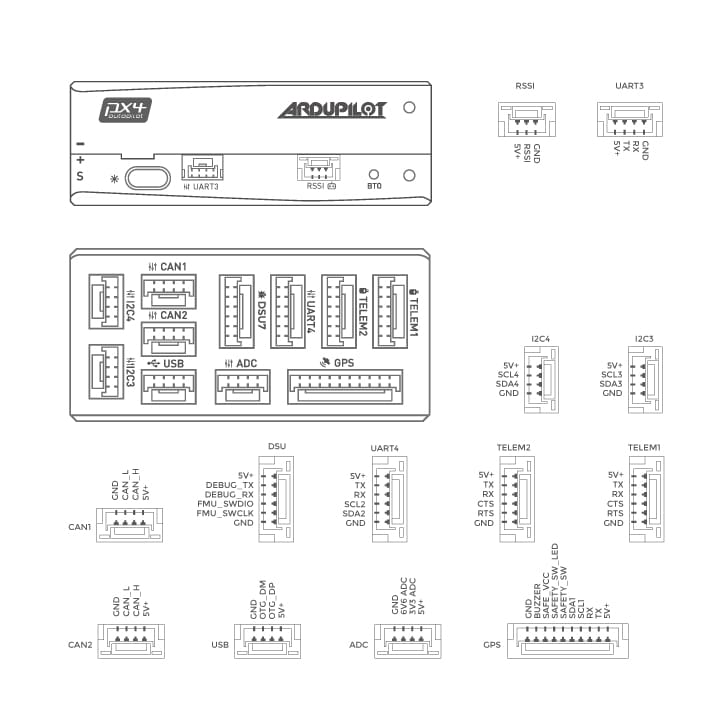
인터페이스:
- PWM 출력 14개 (12개 Dshot 지원)
- 다중 RC 입력 지원(SBU/CPPM/DSM)
- 아날로그/PWM RSSI 입력
- 2 개의 GPS 포트(GPS 및 UART4 포트)
- i2c 버스 4 개(i2c 전용 포트 2 개)
- CAN 버스 포트 2 개
- 2 Power ports(Power A is common adc interface, Power C is DroneCAN battery interface)
- 2 ADC input
- USB 포트 1 개
전원시스템
- 전원: 4.3~5.4V
- USB 입력: 4.75~5.25V
- 서보 레일 입력: 0~36V
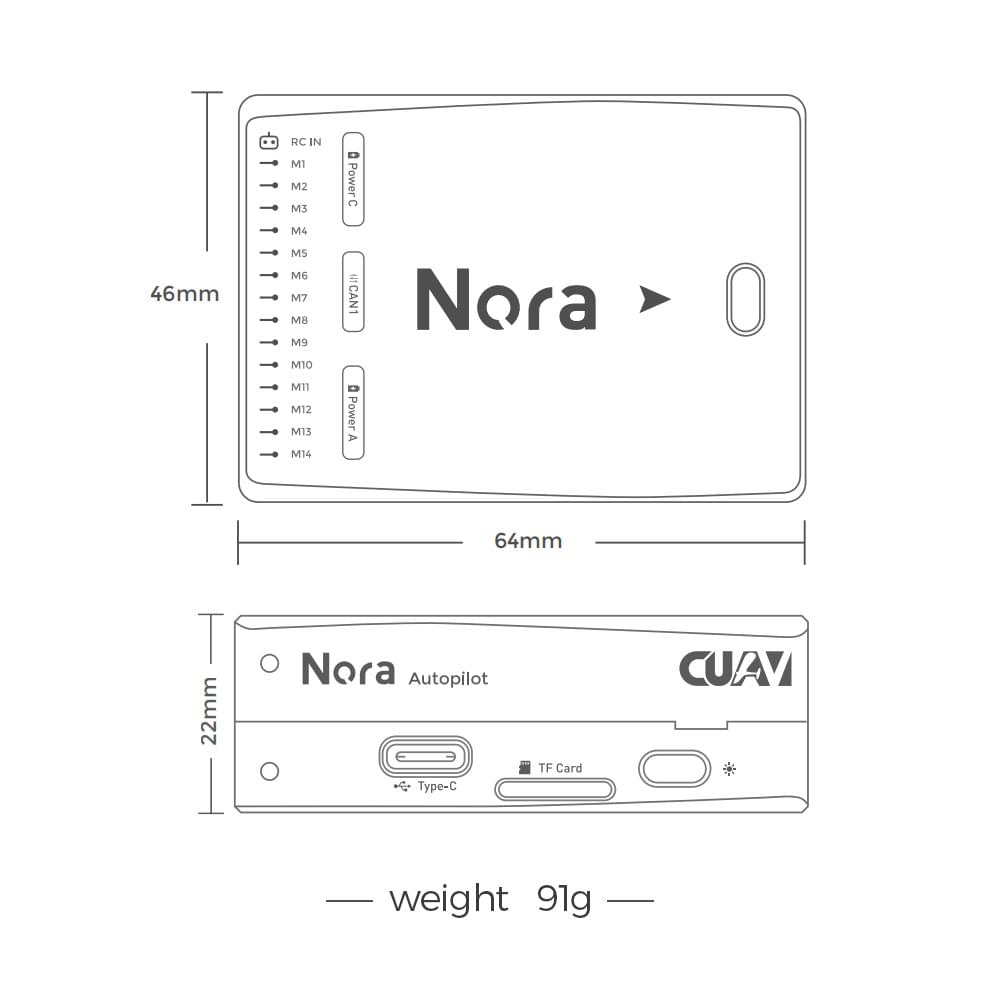
중량과 크기
- 무게 : 101g
기타 특성:
- 작동 온도: -20 ~ 80°c (측정 값)
- 3개의 imus
- 온도 보상 지원
- 내부 충격 흡수
INFO
When it runs PX4 firmware, only 8 PWM outputs work. 나머지 6 개의 PWM 포트는 여전히 조정중입니다(따라서 작성시 VOLT와 호환되지 않음).
Where to Buy
배선
크기와 핀배열
WARNING
The RCIN port is limited to powering the rc receiver and cannot be connected to any power/load.
정격 전압
Nora AutoPilot* can be triple-redundant on the power supply if three power sources are supplied. The two power rails are: POWERA, POWERC and USB.
INFO
The output power rails PWM OUT (0V to 36V) do not power the flight controller board (and are not powered by it). You must supply power to one of POWERA, POWERC or USB or the board will be unpowered.
Normal Operation Maximum Ratings
이러한 조건에서 전원은 아래의 순서대로 시스템에 전원을 공급하여야합니다.
- POWERA and POWERC inputs (4.3V to 5.4V)
- USB input (4.75V to 5.25V)
펌웨어 빌드
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make cuav_nora_default과전류 보호
The Nora has over-current protection on the 5 Volt Peripheral and 5 Volt high power, which limits the current to 2.5A. The Nora has short circuit protection.
WARNING
Up to 2.5 A can be delivered to the connectors listed as pin 1 (although these are only rated at 1 A).
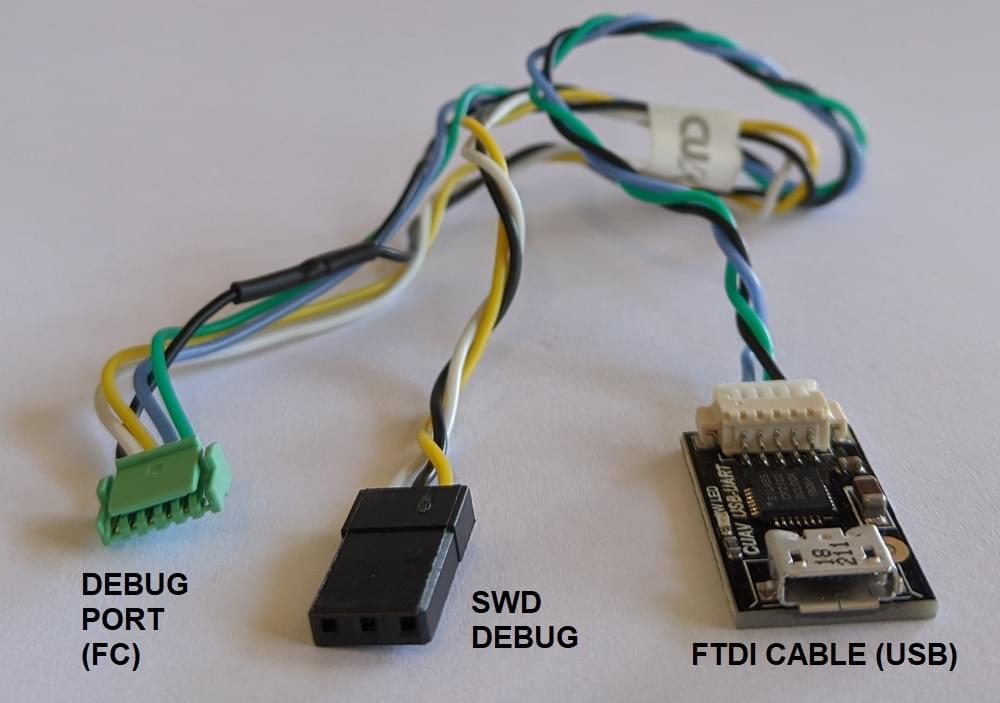
디버그 포트
The system's serial console and SWD interface operate on the DSU7 port. FTDI 케이블을 DSU7 커넥터에 연결하기만 하면됩니다. 제품 목록에는 CUAV FTDI 케이블이 포함되어 있습니다.
The PX4 System Console and SWD interface operate on the FMU Debug port (DSU7).
The debug port (DSU7) uses a JST BM06B connector and has the following pinout:
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | 5V+ | +5V |
| 2 (흑) | DEBUG TX(출력) | +3.3V |
| 3 (흑) | DEBUG TX(입력) | +3.3V |
| 4 (흑) | FMU_SWDIO | +3.3V |
| 5 (흑) | FMU_SWCLK | +3.3V |
| 6 (흑) | GND | GND |
CUAV provides a dedicated debugging cable, which can be connected to the DSU7 port. This splits out an FTDI cable for connecting the PX4 System Console to a computer USB port, and SWD pins used for SWD/JTAG debugging. The provided debug cable does not connect to the SWD port Vref pin (1).
WARNING
The SWD Vref pin (1) uses 5V as Vref but the CPU is run at 3.3V!
일부 JTAG 어댑터 (SEGGER J-Link)는 Vref 전압을 사용하여 SWD 라인의 전압을 설정합니다. For direct connection to Segger Jlink we recommended you use the 3.3 Volts from pin 4 of the connector marked DSM/SBUS/RSSI to provide Vtref to the JTAG (i.e. providing 3.3V and NOT 5V).
지원 플랫폼 및 기체
일반 RC 서보 또는 Futaba S-Bus 서보로 제어 가능한 모든 멀티콥터/비행기/로버 또는 보트. The complete set of supported configurations can be seen in the Airframes Reference.