광류 센서
Optical Flow uses a downward facing camera and a downward facing distance sensor for velocity estimation. It can be used to determine speed when navigating without GNSS — in buildings, underground, or in any other GNSS-denied environment.
The video below shows PX4 holding position using the Ark Flow sensor for velocity estimation in Position Mode:
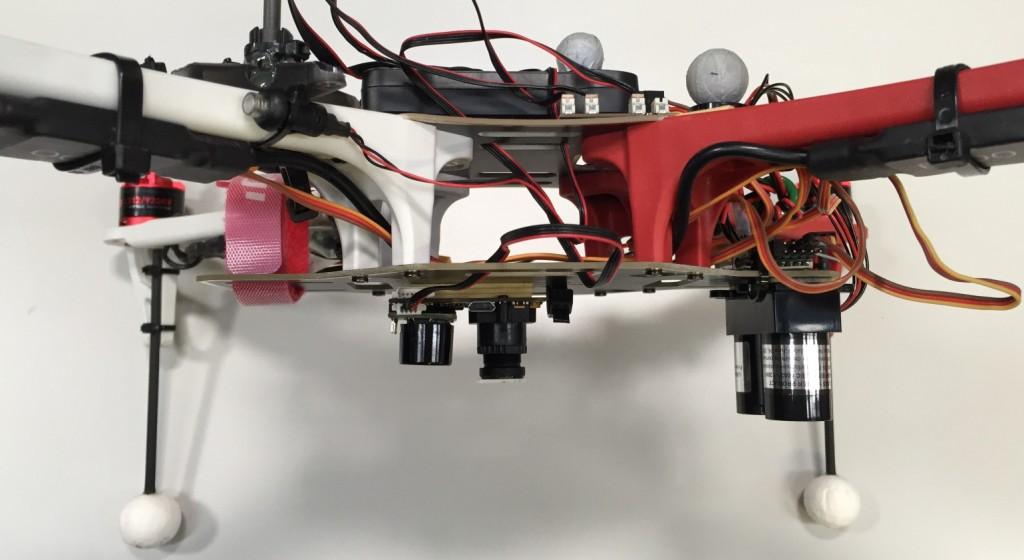
The image below shows an optical flow setup with a separate flow sensor (PX4Flow) and distance sensor (Lidar-Lite):
설정
An Optical Flow setup requires a downward facing camera and a downward facing distance sensor (preferably a LiDAR). These can be combined in a single product, such as the ARK Flow, ARK Flow MR and Holybro H-Flow, or they may be separate sensors.
The sensor(s) can be connected via MAVLink, I2C or any other bus that supports the peripheral.
INFO
If connected to PX4 via MAVLink the Optical Flow camera sensor must publish the OPTICAL_FLOW_RAD message, and the distance sensor must publish the DISTANCE_SENSOR message. The information is written to the corresponding uORB topics: DistanceSensor and ObstacleDistance.
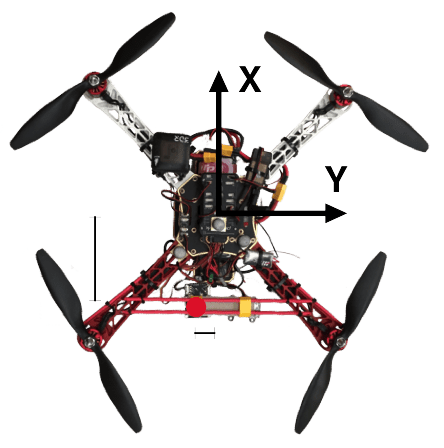
다른 방향으로 이동할 때의 흐름 출력은 다음과 같아야합니다.
| 기체 이동 | 통합 흐름 |
|---|---|
| 전방 | + Y |
| 후방 | - Y |
| 우측 | - X |
| 좌측 | + X |
INFO
The integrated flow values are angular measurements (radians) representing rotation of the image about the sensor's body axes using the right-hand convention. They are not translational displacements along those axes, which is why forward vehicle movement (along X) appears in the Y flow axis, and rightward movement (along Y) appears in the X flow axis. Specifically, forward movement causes the ground image to rotate about the Y axis (+ Y), while rightward movement causes a negative rotation about the X axis (- X).
광류 데이터는 다른 속도 데이터 소스와 융합됩니다. The approach used for fusing sensor data and any offsets from the center of the vehicle must be configured in the estimator.
Scale Factor
For pure rotations the OPTICAL_FLOW_RAD.integrated_xgyro and OPTICAL_FLOW_RAD.integrated_x (respectively integrated_ygyro and integrated_y) have to be the same. If this is not the case, the optical flow scale factor can be adjusted using SENS_FLOW_SCALE.
TIP
The low resolution of common optical flow sensors can cause slow oscillations when hovering at a high altitude above ground (> 20m). Reducing the optical flow scale factor can improve the situation.
유량 센서/카메라
ARK Flow & ARK Flow MR
ARK Flow is a DroneCAN optical flow sensor, distance sensor, and IMU. It has a PAW3902 optical flow sensor, Broadcom AFBR-S50LV85D 30 meter distance sensor, and Invensense ICM-42688-P 6-Axis IMU.
ARK Flow MR is a DroneCAN optical flow sensor, distance sensor, and IMU, for mid-range applications. It has a PixArt PAA3905 optical flow sensor, Broadcom AFBR-S50LX85D 50 meter distance sensor, and Invensense IIM-42653 6-Axis IMU.
Holybro H-Flow
The Holybro H-Flow is a compact DroneCAN optical flow and distance sensor module. It combines a PixArt PAA3905 optical flow sensor, a Broadcom AFBR-S50LV85D distance sensor, and an InvenSense ICM-42688-P 6-axis IMU. An all-in-one design that simplifies installation, with an onboard infrared LED enhances visibility in low-light conditions.
PMW3901 기반 센서
PMW3901 is an optical flow tracking sensor similar to what you would find in a computer mouse, but adapted to work between 80 mm and infinity. Bitcraze, Tindie, Hex, Thone 및 Alientek의 일부 제품을 포함하여 여러 제품에 사용됩니다.
기타 카메라 / 센서
카메라 통합 보드를 사용할 수 있습니다. For this the Optical Flow repo can be used (see also snap_cam).
거리 측정기
You can use any supported distance sensor. 그러나 견고성과 정확성 측면에서는 음향 센서보다 LIDAR를 사용하는 것이 좋습니다.
추정기
추정기는 광학 흐름 센서 및 기타 소스의 데이터를 융합합니다. 융합 방법 설정과 차량 중심에 대한 상대적 오프셋이 사용되는 추정기를 지정하여야합니다.
오프셋은 아래와 같이 차량 방향 및 중심을 기준으로 계산됩니다.
Optical Flow based navigation is enabled by both EKF2 and LPE (deprecated).
Extended Kalman Filter (EKF2)
For optical flow fusion using EKF2, set EKF2_OF_CTRL.
광류 센서가 차량 중앙에서 오프셋된 경우 다음 매개변수를 사용하여 설정합니다.
| Parameter | 설명 |
|---|---|
| EKF2_OF_POS_X | 바디 프레임에서 광류 초점의 X 위치 (기본값은 0.0m). |
| EKF2_OF_POS_Y | 바디 프레임에서 광류 초점의 Y 위치 (기본값은 0.0m). |
| EKF2_OF_POS_Z | 바디 프레임에서 광류 초점의 Z 위치 (기본값은 0.0m). |
See Using PX4's Navigation Filter (EKF2) > Optical flow for more information.