CubePilot Cube Orange Flight Controller
WARNING
PX4 does not manufacture this (or any) autopilot. Contact the manufacturer for hardware support or compliance issues.
The Cube Orange flight controller is a flexible autopilot intended primarily for manufacturers of commercial systems.

배선을 줄이고 신뢰성을 높이며 조립을 쉽게하기 위해 도메인별 캐리어 보드와 함께 사용하도록 설계되었습니다. For example, a carrier board for a commercial inspection vehicle might include connections for a companion computer, while a carrier board for a racer could include ESCs for the frame of the vehicle.
The ADS-B carrier board includes a customized 1090MHz ADSB-In receiver from uAvionix. This provides attitude and location of commercial manned aircraft within the range of Cube. This is automatically configured and enabled in the default PX4 firmware.
Cube에는 2 개의 IMU에 진동 차단이 포함되어 있으며, 세 번째 고정 IMU는 참조 백업용으로 사용됩니다.
TIP
The manufacturer Cube User Guide contains detailed information, including an overview of the Differences between Cube Colours.
INFO
This flight controller is manufacturer supported.
주요 특징
- 32bit STM32H753VI (32bit ARM Cortex M7, 400 MHz, Flash 2MB, RAM 1MB).
- 32 비트 STM32F103 failsafe 코 프로세서
- 14 개 PWM/서보 출력(페일세이프 및 수동 오버라이드 포함 8 개, 보조, 고전력 호환 6 개)
- 추가 주변 장치(UART, I2C, CAN) 다양한 연결 옵션
- 전용 프로세서와 독립형 전원 공급 장치(고정익 적용)로 비행중 복구 기능과 수동 오버라이드 통합 백업 시스템
- Backup system integrates mixing, providing consistent autopilot and manual override mixing modes (fixed-wing use)
- 중복 전원공급장치 및 자동 장애 조치
- 외부 안전 스위치
- 다색 LED 주시각 표시기
- 고전력 멀티톤 피에조 오디오 표시기
- 장기간 고속 로깅용 microSD 카드
Where to Buy
조립
사양
- Processor:
- STM32H753VI (32bit ARM Cortex M7)
- 400 MHz
- 1 MB RAM
- 2MB 플래시 (완전 액세스 가능)
- Failsafe co-processor:
- STM32F103 (32bit ARM Cortex-M3)
- 24 MHz
- 8 KB SRAM
- Sensors: (all connected via SPI)
- Accelerometer: (3) ICM20948, ICM20649, ICM20602
- Gyroscope: (3) ICM20948, ICM20649, ICM20602
- Compass: (1) ICM20948
- Barometric Pressure Sensor: (2) MS5611
- Operating Conditions:
- Operating Temp: -10C to 55C
- IP rating/Waterproofing: Not waterproof
- Servo rail input voltage: 3.3V / 5V
- USB port input:
- 전압: 4V - 5.7V
- 정격 전류: 250 mA
- POWER:
- 입력 전압: 4.1V - 5.7V
- 정격 입력 전류: 2.5A
- 정격 입/출력 전력: 14W
- Dimensions:
- Cube: 38.25mm x 38.25mm x 22.3mm
- Carrier: 94.5mm x 44.3mm x 17.3mm
- Interfaces
- IO 포트: 14 개의 PWM 서보 출력(IO에서 8 개, FMU에서 6 개)
- UART (직렬 포트) 5개, 1 개의 고전력 지원, 2x (HW 흐름 제어 포함)
- CAN 2개(하나는 내부 3.3V 트랜시버, 하나는 확장 커넥터에 있음)
- R/C inputs:
- Spektrum DSM/DSM2/DSM-X® Satellite 호환 입력
- Futaba S.BUS® 호환 입력 및 출력
- PPM 합계 신호 입력
- RSSI(PWM 또는 전압) 입력
- I2C
- SPI
- 3.3v ADC 입력
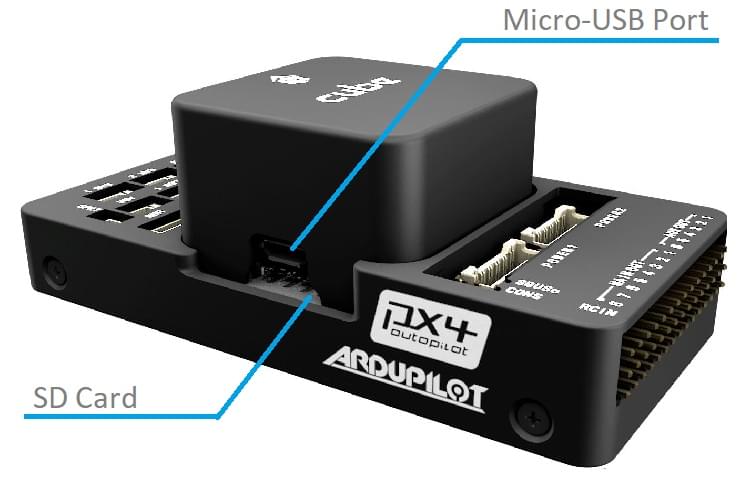
- 내부 microUSB 포트 및 외부 microUSB 포트 확장
포트
위쪽(GPS, TELEM 등)
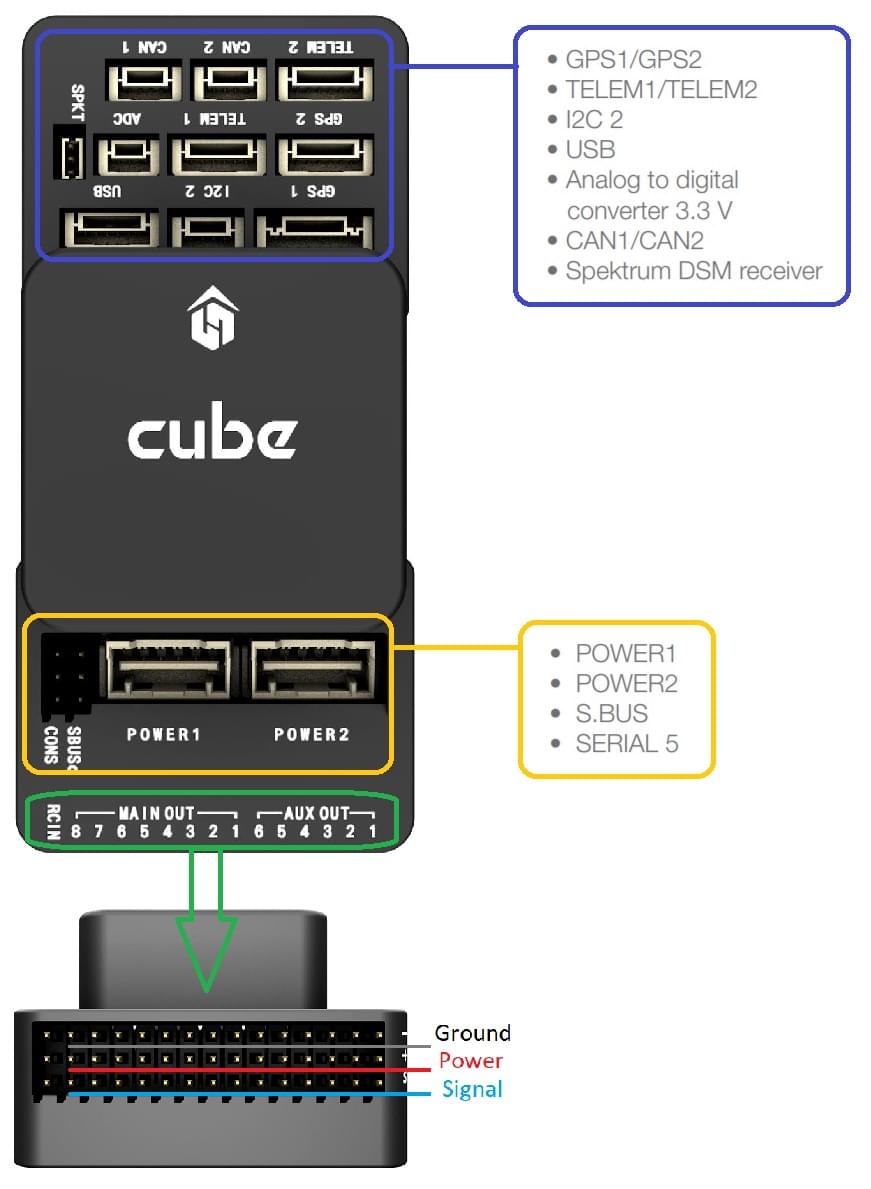
핀배열
TELEM1, TELEM2 포트
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | CTS (입력) | +3.3V |
| 5 (흑) | RTS (출력) | +3.3V |
| 6 (흑) | GND | GND |
GPS1 port
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | SCL I2C2 | +3.3V |
| 5 (흑) | SDA I2C2 | +3.3V |
| 6 (흑) | Safety Button | GND |
| 7 (흑) | Button LED | GND |
| 8 (blk) | GND | GND |
GPS2 port
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V |
| 3 (흑) | RX (입력) | +3.3V |
| 4 (흑) | SCL I2C1 | +3.3V |
| 5 (흑) | SDA I2C1 | +3.3V |
| 6 (흑) | GND | GND |
ADC
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2 (흑) | ADC 입력 | 최대 +6.6V |
| 3 (흑) | GND | GND |
I2C
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2 (흑) | SCL | +3.3 (풀업) |
| 3 (흑) | SDA | +3.3 (풀업) |
| 4 (흑) | GND | GND |
CAN1 & CAN2
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2 (흑) | CAN_H | +12V |
| 3 (흑) | CAN_L | +12V |
| 4 (흑) | GND | GND |
POWER1 & POWER2
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2 (red) | VCC | +5V |
| 3 (흑) | CURRENT sensing | +3.3V |
| 4 (흑) | VOLTAGE sensing | +3.3V |
| 5 (흑) | GND | GND |
| 6 (흑) | GND | GND |
USB
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2 (흑) | OTG_DP1 | +3.3V |
| 3 (흑) | OTG_DM1 | +3.3V |
| 4 (흑) | GND | GND |
| 5 (흑) | BUZZER | Battery voltage |
| 6 (흑) | FMU Error LED |
SPKT
| 핀 | 신호 | 전압 |
|---|---|---|
| 1 (blk) | IN | |
| 2 (흑) | GND | GND |
| 3 (red) | OUT | +3.3V |
TELEM1, TELEM2
| 핀 | 신호 | 전압 |
|---|---|---|
| 1(red) | VCC | +5V |
| 2 (흑) | TX (출력) | +3.3V to 5V |
| 3 (흑) | RX (입력) | +3.3V to 5V |
| 4 (흑) | CTS (OUT) | +3.3V to 5V |
| 5 (흑) | RTS (IN) | +3.3V to 5V |
| 6 (흑) | GND | GND |
시리얼 포트 매핑
| UART | 장치 | 포트 |
|---|---|---|
| USART2 | /dev/ttyS0 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS1 | TELEM2 (흐름 제어) |
| UART4 | /dev/ttyS2 | GPS1 |
| USART6 | /dev/ttyS3 | PX4IO |
| UART7 | /dev/ttyS4 | CONSOLE/ADSB-IN |
| UART8 | /dev/ttyS5 | GPS2 |
USB/SDCard 포트
펌웨어 빌드
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target, open up the terminal and enter:
make cubepilot_cubeorange회로도
Board schematics and other documentation can be found here: The Cube Project.
추가 정보 및 문서
- Cube Wiring Quickstart
- Cube 문서 (제조사) :