OctoMap 3D Models with ROS/Gazebo Classic
The OctoMap library is an open source library for generating volumetric 3D environment models from sensor data. This model data can then be used by a drone for navigation and obstacle avoidance.
This guide covers how to use OctoMap with the Gazebo Classic Rotors Simulator and ROS.
설치
The installation requires ROS, Gazebo Classic and the Rotors Simulator plugin. Follow the Rotors Simulator instructions to install.
Next, install the OctoMap library:
sudo apt-get install ros-indigo-octomap ros-indigo-octomap-mapping
rosdep install octomap_mapping
rosmake octomap_mappingNow, open ~/catkin_ws/src/rotors_simulator/rotors_gazebo/CMakeLists.txt and add the following lines to the bottom of the file:
find_package(octomap REQUIRED)
include_directories(${OCTOMAP_INCLUDE_DIRS})
link_libraries(${OCTOMAP_LIBRARIES})Open ~/catkin_ws/src/rotors_simulator/rotors_gazebo/package.xml and add the following lines:
<build_depend>octomap</build_depend>
<run_depend>octomap</run_depend>Run the following two lines:
INFO
The first line changes your default shell editor to gedit. This is recommended for users who have little experience with vim (the default editor), but can otherwise be omitted.
export EDITOR='gedit'
rosed octomap_server octomap_tracking_server.launchand change the two following lines:
<param name="frame_id" type="string" value="map" />
...
<!--remap from="cloud_in" to="/rgbdslam/batch_clouds" /-->to:
<param name="frame_id" type="string" value="world" />
...
<remap from="cloud_in" to="/firefly/vi_sensor/camera_depth/depth/points" />Running the Simulation
Run the following three lines in separate terminal windows. This opens up Gazebo Classic, Rviz and an octomap server.
roslaunch rotors_gazebo mav_hovering_example_with_vi_sensor.launch mav_name:=firefly
rviz
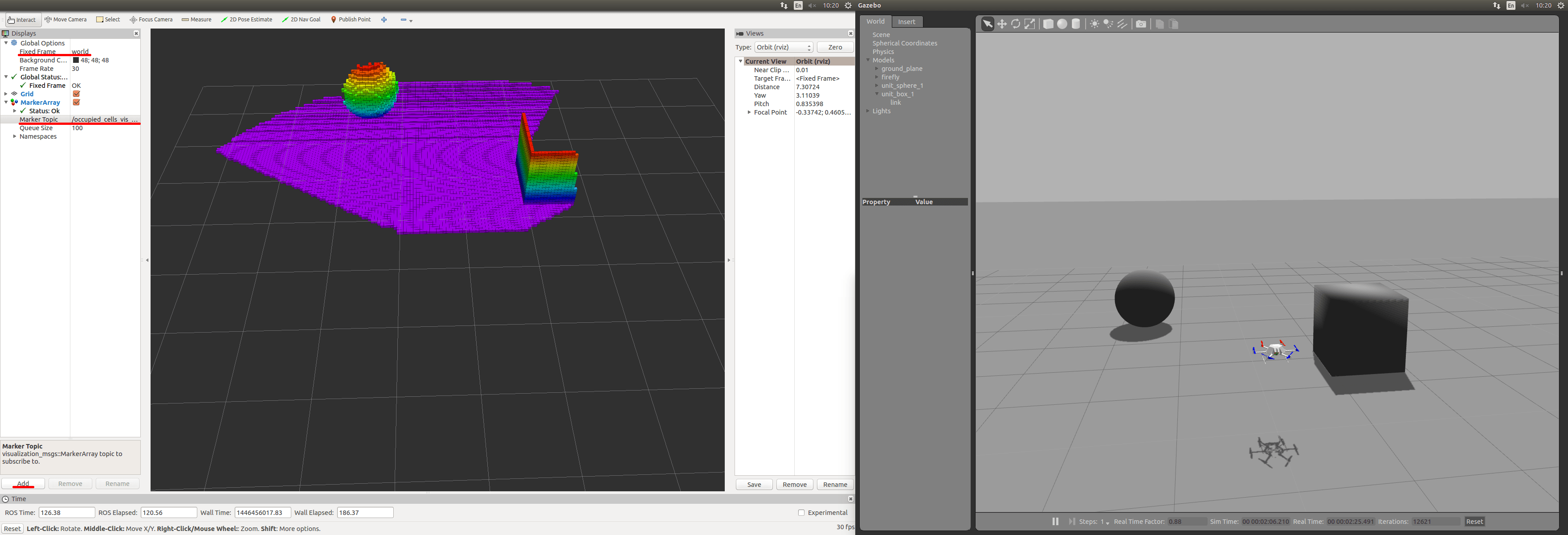
roslaunch octomap_server octomap_tracking_server.launchIn Rviz, change the field 'Fixed Frame' from 'map' to 'world' in the top left of the window. Now click the add button in the bottom left and select MarkerArray. Then double click the MarkerArray and change 'Marker Topic' from /free_cells_vis_array to /occupied_cells_vis_array.
Now you should see a part of the floor.
In the Gazebo Classic window, insert a cube in front of the red rotors and you should see it in Rviz.