Position Mode (Multicopter)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
")
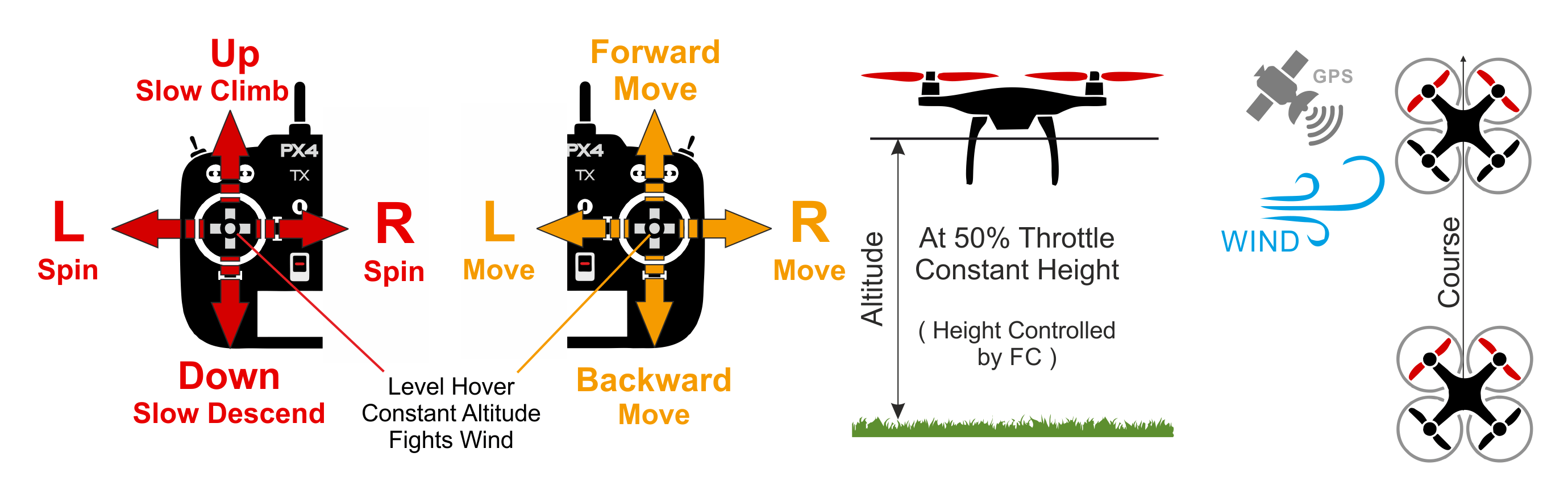
Position is an easy-to-fly RC mode in which roll and pitch sticks control acceleration over ground in the vehicle's left-right and forward-back directions (similar to a car's accelerator pedal), and throttle controls speed of ascent-descent. When the sticks are released/centered the vehicle will actively brake, level, and be locked to a position in 3D space — compensating for wind and other forces. With full stick deflection the vehicle accelerates initially with MPC_ACC_HOR_MAX ramping down until it reaches the final velocity MPC_VEL_MANUAL.
TIP
Position mode is the safest manual mode for new fliers. Unlike Altitude and Stabilized modes the vehicle will stop when the sticks are centered rather than continuing until slowed by wind resistance.
The diagram below shows the mode behaviour visually (for a mode 2 transmitter).
착륙
Landing in this mode is easy:
- Position the drone horizontally above the landing spot using the roll and pitch stick.
- Let go of the roll and pitch stick and give it enough time to come to a complete stop.
- Pull the throttle stick down gently until the vehicle touches the ground.
- Pull the throttle stick all the way down to facilitate and accelerate land detection.
- The vehicle will lower propeller thrust, detect the ground and automatically disarm (by default).
WARNING
While very rare on a well calibrated vehicle, sometimes there may be problems with landing.
- If the vehicle does not stop moving horizontally:
- You can still land under control in Altitude mode. The approach is the same as above, except that you must manually ensure that the vehicle stays above the landing spot using the roll and pitch stick.
- After landing check GPS and magnetometer orientation, calibration.
- If the vehicle does not detect the ground/landing and disarm:
- After the vehicle is on the ground switch to Stabilized mode keeping the throttle stick low, and manually disarm using a gesture or other command. Alternatively you can also use the kill switch when the vehicle is already on the ground.
Technical Summary
RC mode where roll, pitch, throttle (RPT) sticks control movement in corresponding axes/directions. Centered sticks level vehicle and hold it to fixed altitude and position against wind.
- Centered roll, pitch, throttle sticks (within RC deadzone MAN_DEADZONE) hold x, y, z position steady against any disturbance like wind.
- Outside center:
- Roll/Pitch sticks control horizontal acceleration over ground in the vehicle's left-right and forward-back directions (respectively).
- Throttle stick controls speed of ascent-descent.
- 요 스틱은 수평면 위의 회전 각속도를 제어합니다.
- 이륙:
- 착륙했을 때 스로틀 스틱을 62.5 % (하단에서 전체 범위) 이상으로 올리면 기체가 이륙합니다.
- Global position estimate is required.
- Manual control input is required (such as RC control, joystick).
- Roll, Pitch, Throttle: Assistance from autopilot to hold position against wind.
- Yaw: Assistance from autopilot to stabilize the attitude rate. Position of RC stick maps to the rate of rotation of vehicle in that orientation.
매개변수
All the parameters in the Multicopter Position Control group are relevant. A few parameters of particular note are listed below.
| Parameter | 설명 |
|---|---|
| MAN_DEADZONE | Deadzone of sticks where position hold is enabled. Default: 0.1 (10% of full stick range). |
| MPC_Z_VEL_MAX_UP | 최대 수직 상승 속도. 기본값: 3 m/s. |
| MPC_Z_VEL_MAX_DN | 최대 수직 하강 속도. 기본값: 1 m/s. |
| MPC_LAND_ALT1 | Altitude for triggering first phase of slow landing. Below this altitude descending velocity gets limited to a value between MPC_Z_VEL_MAX_DN (or MPC_Z_V_AUTO_DN) and MPC_LAND_SPEED. Value needs to be higher than MPC_LAND_ALT2. Default 10m. |
| MPC_LAND_ALT2 | Altitude for second phase of slow landing. Below this altitude descending velocity gets limited to MPC_LAND_SPEED. Value needs to be lower than "MPC_LAND_ALT1". Default 5m. |
MPC_XXXX | 대부분의 MPC_xxx 매개 변수는이 모드에서 비행 동작에 어느정도 영향을 미칩니다 . For example, MPC_THR_HOVER defines the thrust at which a vehicle will hover. |
| MPC_POS_MODE | Stick input to movement translation strategy. From PX4 v1.12 the default (Acceleration based) is that stick position controls acceleration (in a similar way to a car accelerator pedal). Other options allow stick deflection to directly control speed over ground, with and without smoothing and acceleration limits. |
| MPC_ACC_HOR_MAX | Maximum horizontal acceleration. |
| MPC_VEL_MANUAL | Maximum horizontal velocity. |
| MPC_LAND_SPEED | Landing descend rate. Default 0.7 m/s. |
추가 정보
Position Loss/Safety
Position mode is dependent on having an acceptable position estimate. If the estimate falls below acceptable levels, for example due to GPS loss, this may trigger a Position (GPS) Loss Failsafe. Depending on configuration, whether you have a remote control, and whether there is an adequate altitude estimate, PX4 may switch to altitude mode, manual mode, land mode or terminate.