Holybro X500 + Pixhawk4 조립
INFO
Holybro initially supplied this kit with a Holybro Pixhawk 4), but at time of writing this has been upgraded to a Holybro Pixhawk 6C. This build log is still relevant as the kit assembly is virtually the same, and likely to remain so as the flight controller is upgraded.
This topic provides full instructions for building the kit and configuring PX4 using QGroundControl.
주요 정보
- Full Kit: Holybro X500 Kit
- Flight controller: Pixhawk 4
- Assembly time (approx.): 3.75 hours (180 minutes for frame, 45 minutes for autopilot installation/configuration)

부품 명세서
The Holybro X500 Kit includes almost all the required components:
- Pixhawk 4 autopilot
- Holybro M8N GPS
- Power Management - PM07
- Holybro Motors - 2216 KV880 x4 (superseded - check spare parts list for current version).
- Holybro BLHeli S ESC 20A x4 (superseded - check spare parts list for current version).
- Propellers - 1045 x4 (superseded - check spare parts list for current version).
- 배터리 스트랩 - PM07
- 전원 및 무선 조종기 케이블
- 휠베이스 - 500 mm
- 433 MHz 텔레메트리 /915 MHz 텔레메트리
- 433 MHz / 915 MHz Holybro Telemetry Radio
Additionally you will need a battery and receiver (compatible radio system) if you want to control the drone manually.
주요 하드웨어
프레임 및 자동 조종 장치 설치를 위한 하드웨어들 입니다.
| 항목 | 설명 | 수량 |
|---|---|---|
| 하판 | 탄소 섬유(두께 2mm) | 1 |
| 상판 | 탄소 섬유(두께 1.5mm) | 1 |
| Arm | 6 개의 부품과 4 개의 나사로 구성 4 개의 너트 | 4 |
| 착륙 기어 - 수직 막대 | 탄소 섬유 튜브 + 엔지니어링 플라스틱 | 2 |
| 착륙 기어 - 크로스바 | 탄소 섬유 튜브 + 엔지니어링 플라스틱 + 폼 | 2 |
| 배터리 패드 | 3mm 실리콘 시트 검정 | 4 |
| 철탑 | 직경 : 10mm, 길이 : 250mm | 2 |
| 배터리 장착 보드 | 두께: 2mm | 1 |
| 배터리 패드 | 3mm 실리콘 시트 검정 | 1 |
| 플팻폼 보드 | 두께: 2mm | 1 |
| Hanger & rubber ring gasket | 내부 구멍 직경 : 10mm 검정 | 8 |

전자부품
| 품목 설명 | 수량 |
|---|---|
| Pixhawk4 & Assorted Cables | 1 |
| Pixhawk4 GPS 모듈 | 1 |
| I2C 스플리터 보드 | 1 |
| 모터스 2216 KV880(V2 업데이트) | 4 |
| Holybro BLHeli S ESC 20A x4 | 1 |
| 433 MHz / 915 MHz Holybro Telemetry Radio | 1 |
필요한 공구들
조립시에 필요한 공구들입니다.
- 1.5 mm 육각 스크류 드라이버
- 2.0 mm 육각 스크류 드라이버
- 2.5 mm 육각 스크류 드라이버
- 3mm Phillips 스크류드라이버
- 5.5mm 소켓 렌치 또는 작은 파일러
- 전선 커터
- 정밀 트위저
조립
예상 조립 시간은 3.75시간(프레임은 180분, 오토파일럿 설치와 설정은 45분)입니다.
랜딩기어 조립부터 시작합니다. 랜딩 기어 나사를 풀고 수직 기둥을 삽입합니다(그림 1 및 2).

Figure 2: Landing gear components

Figure 2: Landing gear assembled
그런 다음, 그림 3에 표시된 4개의 모터 베이스를 통해 4개의 암을 넣습니다. 로드가 베이스를 약간 돌출시키고 4개의 암 전체에서 일관성이 있는 지 확인하고, 모터 와이어가 바깥쪽을 향하도록 합니다.
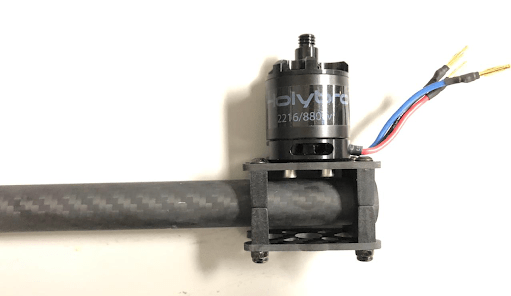
Figure 3: Attach arms to motor bases
4개의 나일론 나사와 나일론 스탠드오프를 삽입하고, 그림 4와 같이 4개의 나일론 너트를 사용하여 전원 모듈 PM07을 하단 플레이트에 부착합니다.
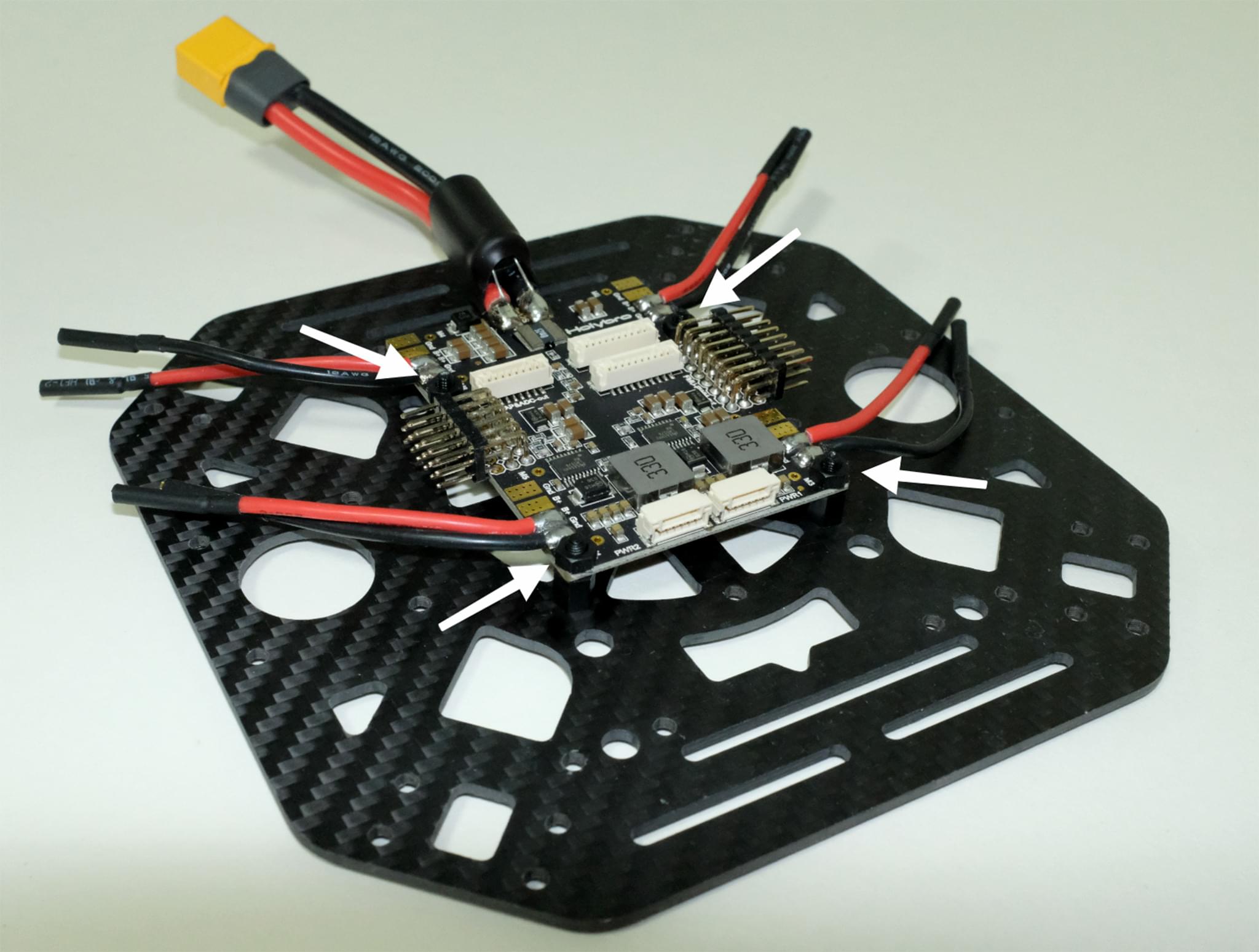
Figure 4: Attach power module
각 암을 통해 4개의 모터 ESC를 공급하고, 그림 5에 표시된 모터에 3선 끝을 연결합니다.

Figure 5: Connect motors
Connect the ESCs power wires onto the power module PM07, black->black and red->red, ESC PWM signal wires goes to "FMU-PWM-Out". 모터 ESC PWM 와이어를 올바른 순서로 연결하였는 지 확인하십시오. Refer to Figure 7 for airframe motor number and connect to the corresponding number on the PM07 board.
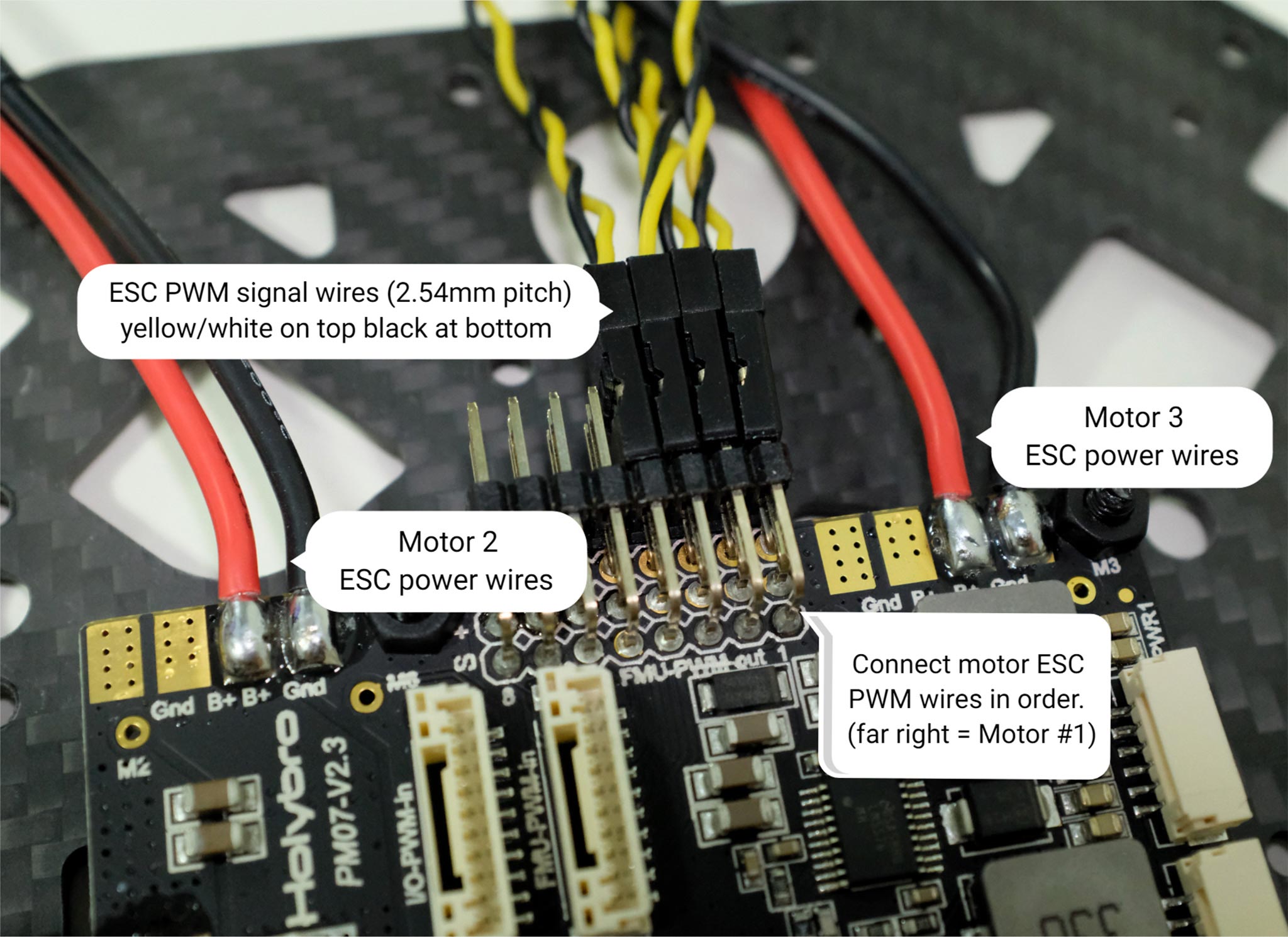 Figure 7: ESC power module and signal wiring
Figure 7: ESC power module and signal wiring모터 상단의 색상은 회전 방향(그림 7-1)을 나타내며, 검은색 끝은 시계 방향, 흰색 끝은 반시계 방향입니다. Make sure the follow the PX4 quadrotor x airframe reference for motor direction (figure 7-2).
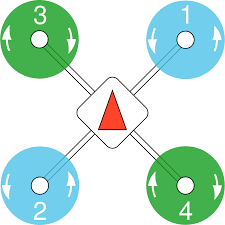
Figure 7: Motor order/direction diagram

Figure 7-1: Motor direction
10핀 케이블을 FMU-PWM-in에 연결하고, 6핀 케이블을 PM07 전원 모듈의 PWR1에 연결합니다.
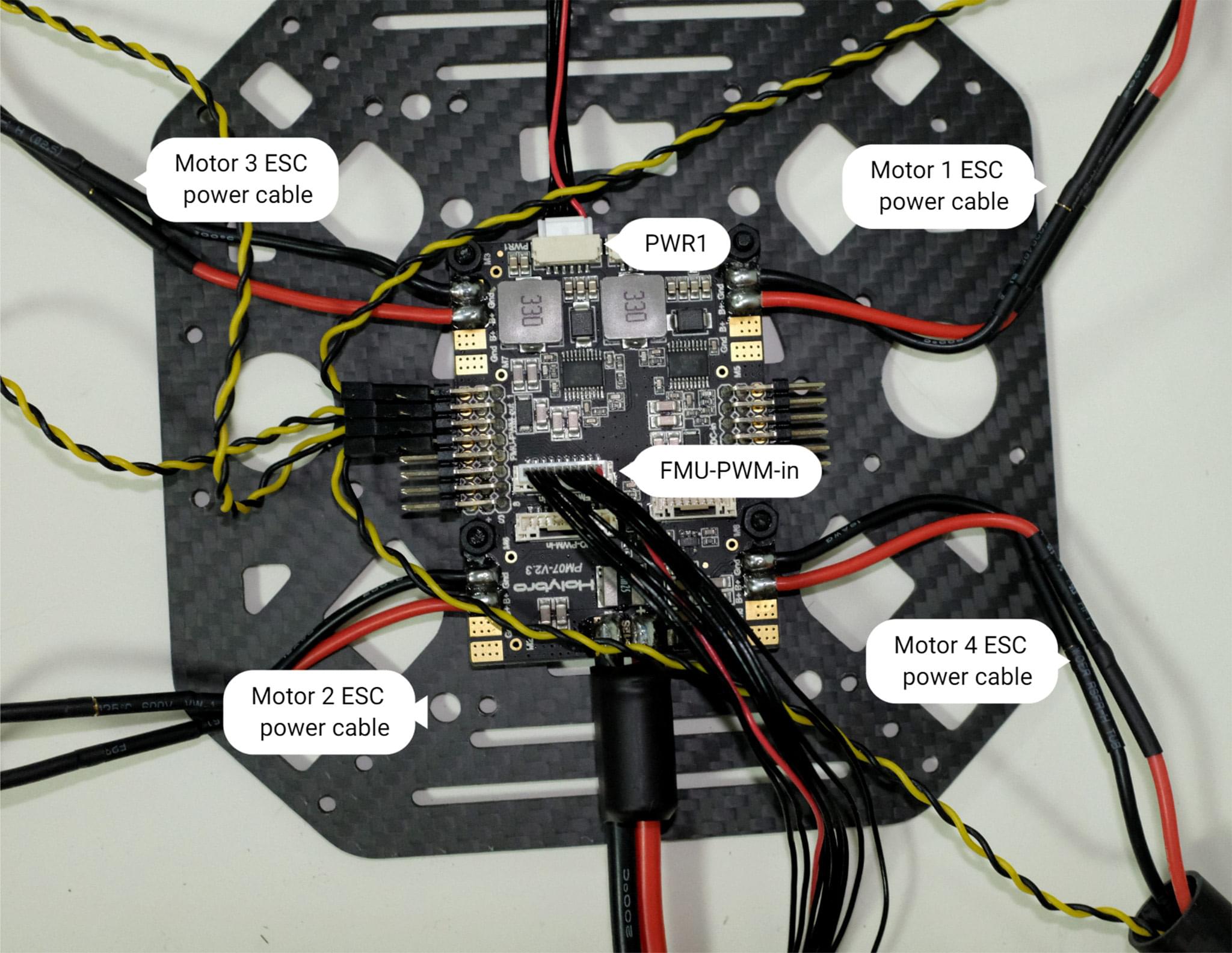
Figure 8: Power module PWM and power wiring
GPS를 상판에 장착하는 경우에는 4개의 나사와 너트를 사용하여 GPS 장착을 상판에 고정합니다.

Figure 9: Secure GPS mount onto top plate
상판을 통하여 PM07 케이블을 공급합니다. 양쪽에 4개의 U자형 나일론 스트랩, 나사 및 너트를 사용하여 상단 및 하단 플레이트를 연결하고, 모터 ESC 케이블이 그림 10과 같이 U자형 나일론 스트랩 내부에 있는 지 확인하고 너트를 느슨하게 유지합니다.
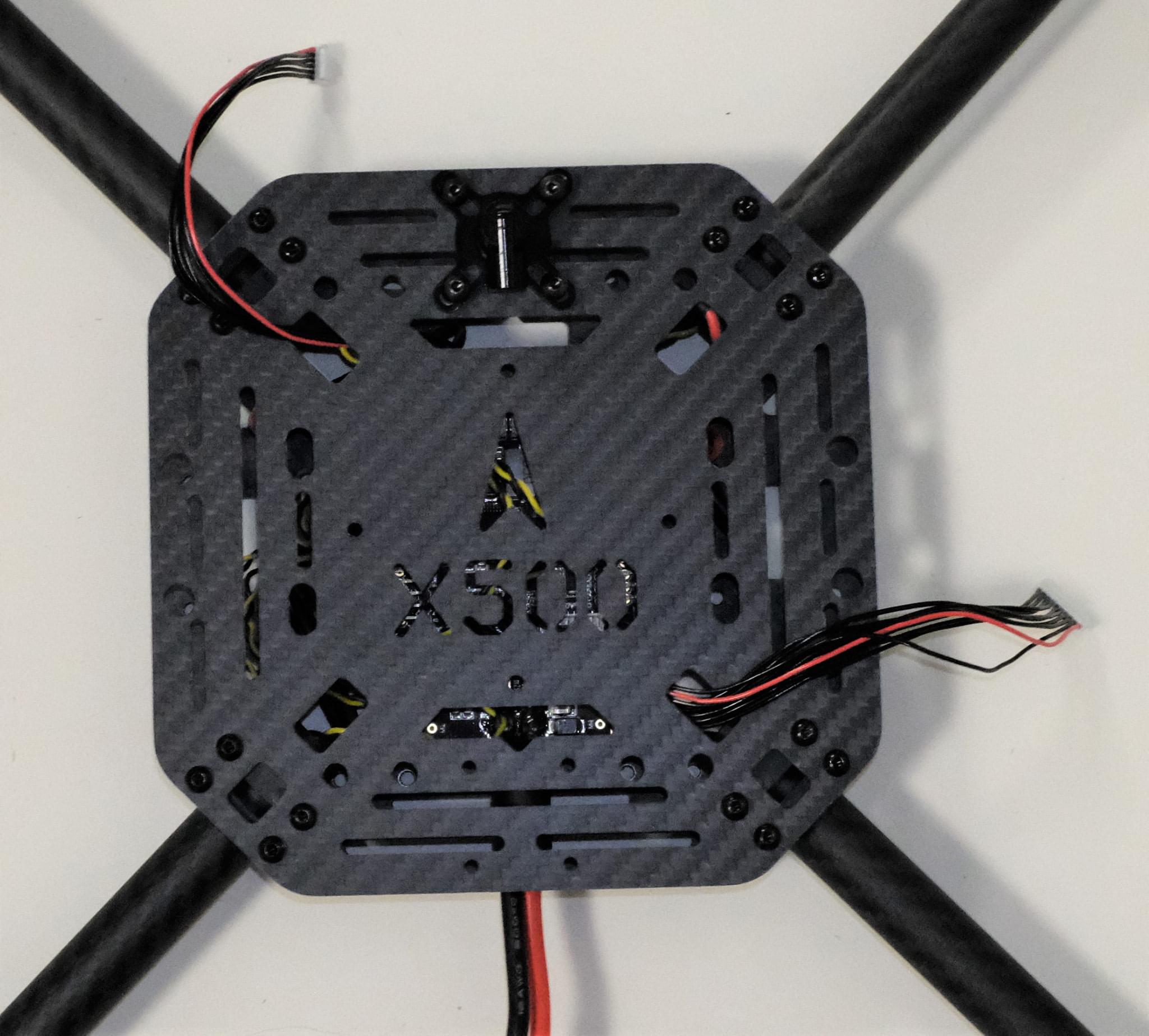
Figure 10-1: Feed power module cables through top plate

Figure 10-2: Connecting top and bottom plate
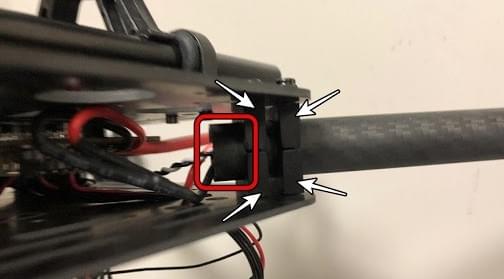
암 튜브를 프레임에 약간 밀어 넣고, 돌출 정도(그림 11의 빨간색 사각형)가 4개의 암 모두에서 일정한 지 확인합니다. 모든 모터가 위를 향하고 있는 지 확인후, 모든 너트와 나사를 조입니다.
행거 개스킷을 행거 4개에 넣고 육각 나사 8개를 사용하여 하단 플레이트에 장착합니다(그림 11). 나사 구멍은 그림 12에서 흰색 화살표로 표시되어 있습니다. 설치가 더 쉽도록 드론을 옆으로 기울이는 것이 좋습니다.

Figure 11: Hanger gaskets
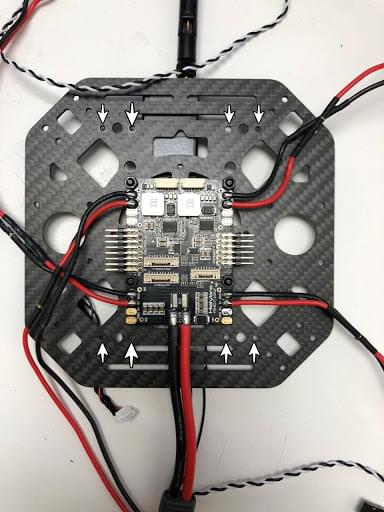
Figure 12: Screw holes
행거 링에 슬라이드 바를 삽입합니다(그림 13). 배터리 마운트와 플랫폼 보드를 조립하고, 그림 14와 같이 슬라이드 바에 장착합니다.

Figure 13: Slide bars

Figure 14: Battery mount on slide bars
랜딩 기어를 하판에 장착합니다. 이 설치 과정을 더 쉽게 하려면 드론을 옆으로 기울이는 것이 좋습니다.

Figure 15: Landing Gear
테이프를 사용하여 GPS를 GPS 마스트 상단에 붙이고 GPS 마스트를 장착합니다. GPS의 화살표가 전방을 가리키는 지 확인하십시오(그림 16).

Figure 16: GPS and mast
상판에 텔레메트리를 장착합니다. Plug the telemetry cable into
TELEM1port and GPS module toGPS MODULEport on the flight controller. Plug the cable from PM07FMU-PWM-intoI/O-PWM-outon the FC and PM07PWR1toPOWER1on the FC, as shown in Figure 17.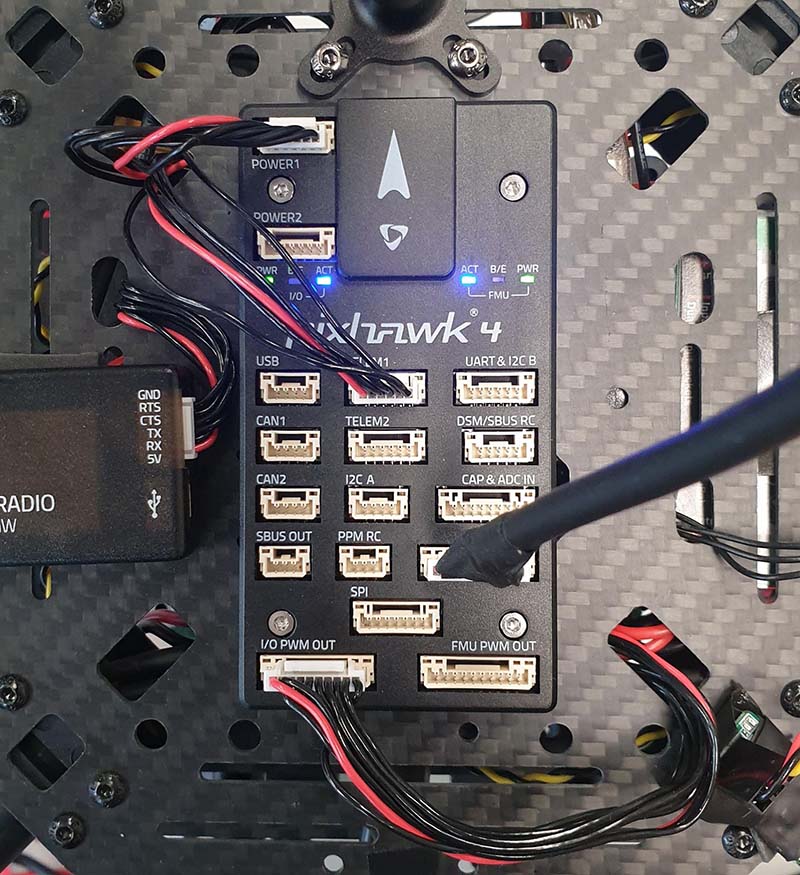
Figure 17: Mount telemetry radio/plug in PWM and Power cables to Flight controller.
Please refer to Pixhawk 4 Quick Start for more information.
조립이 완료되었습니다. 조립 완료된 키트는 다음과 같습니다.

PX4 설정
TIP
Full instructions for installing and configuring PX4 can be found in Basic Configuration.
QGroundControl is used to install the PX4 autopilot and configure/tune it for the X500 frame. Download and install QGroundControl for your platform.
First update the firmware, airframe, and actuator mappings:
You will need to select the Holybro S500 airframe (Quadrotor x > Holybro S500).
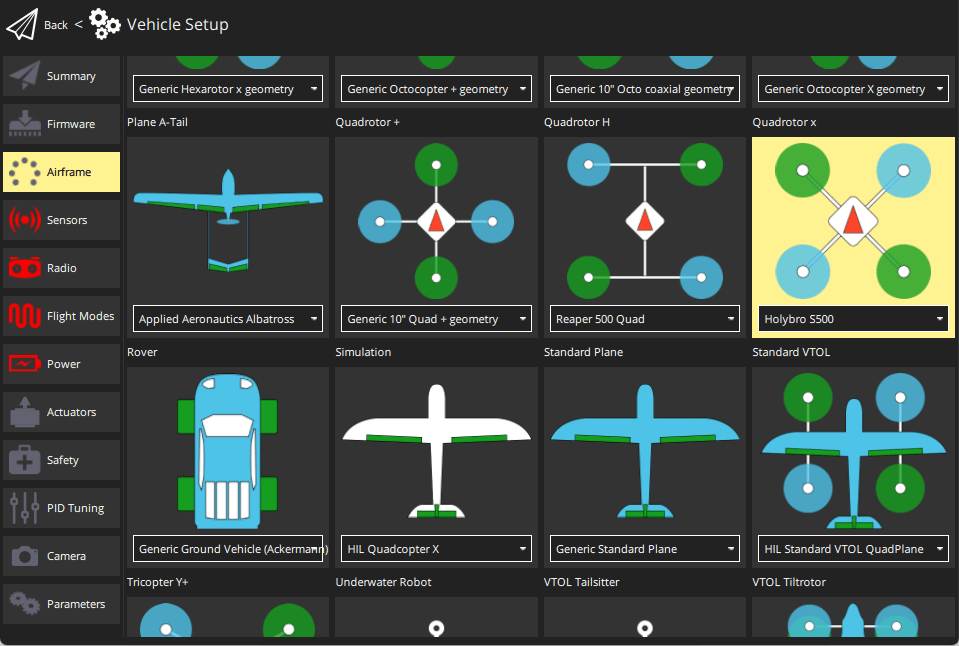
- You should not need to update the vehicle geometry (as this is a preconfigured airframe).
- Assign actuator functions to outputs to match your wiring.
- Test the configuration using the sliders.
그리고, 설치후에 필수적인 설정 작업과 보정 작업을 진행하여야 합니다.
이후 다음 작업 역시 수행되어야 합니다:
튜닝
Airframe selection sets default autopilot parameters for the frame. 이 상태로도 비행이 가능하지만, 특정 기체에 관련된 변수들을 조정하는 것이 바람직합니다.
For instructions on how, start from Autotune.
감사의 글
이 빌드 로그는 Dronecode Test Flight Team에서 제공했습니다.