DroneCAN
DroneCAN is a open software communication protocol for flight controllers and other CAN devices on a vehicle to communicate with each other.
WARNING
- DroneCAN is not enabled by default, and nor are specific sensors and features that use it. For setup information see PX4 Configuration.
- PX4 requires an SD card to enable dynamic node allocation and for firmware update. The SD card is not used in flight.
INFO
DroneCAN was previously known as UAVCAN v0 (or just UAVCAN). The name was changed in 2022.
Benefits of DroneCAN
Connecting peripherals over DroneCAN has many benefits:
- Many different sensors and actuators are already supported.
- CAN has been specifically designed to deliver robust and reliable connectivity over relatively large distances. It enables safe use of ESCs on bigger vehicles and communication redundancy.
- The bus is bi-directional, enabling health monitoring, diagnostics, and RPM telemetry.
- Wiring is less complicated as you can have a single bus for connecting all your ESCs and other DroneCAN peripherals.
- Setup is easier as you configure ESC numbering by manually spinning each motor.
- It allows users to configure and update the firmware of all CAN-connected devices centrally through PX4.
- PX4 automatically tracks device information (vendor, model, versions, serial numbers) for maintenance and fleet management. See Asset Tracking.
지원 하드웨어
Most common types of peripherals (sensors, ESCs, and servos) that are DroneCAN/UAVCAN v0 compliant are supported.
Supported hardware includes (this is not an exhaustive list):
Airspeed sensors
GNSS receivers for GNSS (GPS, GLONASS, BeiDou, and so on)
Power monitors
나침반
Distance sensors
광류 센서
Generic CAN Node (enables use of I2C, SPI, UART sensors on the CAN bus).
하드웨어 설정
DroneCAN operates over a CAN network. DroneCAN hardware should be connected as described in CAN > Wiring.
Node ID Allocation
Every DroneCAN device must be configured with a node id that is unique on the vehicle.
Most devices support Dynamic Node Allocation (DNA), which allows PX4 to automatically configure the node ID of each detected peripheral on system startup. Consult the manufacturer documentation for details on whether your device supports DNA and how to enable it. Many devices will automatically switch to DNA if the node id is set to 0. PX4 will enable the built in allocation server if the UAVCAN_ENABLE parameter is > 1 (set to 2 or 3).
Some devices don't support DNA. Additionally, in certain mission-critical scenarios, you might prefer to manually configure node IDs beforehand instead of relying on the dynamic allocation server. If you wish to disable the DNA completely, set UAVCAN_ENABLE to 1 and manually set each node ID to a unique value. If the DNA is still running and certain devices need to be manually configured, give these devices a value greater than the total number of DroneCAN devices to avoid clashes.
INFO
The PX4 node ID can be configured using the UAVCAN_NODE_ID parameter. The parameter is set to 1 by default.
Devices running the PX4 DroneCAN firmware (such as ARK CANnode) can use the CANNODE_NODE_ID parameter to set a static node ID. Set it to 0 (default) for dynamic allocation, or to a value between 1-125 to use a specific static node ID.
WARNING
At time of writing, PX4 does not run the node allocation server on the CAN2 port. This means that if you have a device that is only connected to CAN2 (not redundantly to CAN1 and CAN2), you will need to manually configure its node ID.
PX4 설정
DroneCAN is configured on PX4 by setting specific PX4 parameters in QGroundControl. You will need to enable DroneCAN itself, along with subscriptions and publications for any features that you use.
INFO
In some cases you may need to also configure parameters on the connected CAN devices (these can also be set using QGC).
Enabling DroneCAN
To enable the PX4 DroneCAN driver, set the UAVCAN_ENABLE parameter:
0: DroneCAN driver disabled1: DroneCAN driver enabled for sensors, DNA server disabled2: DroneCAN driver enabled for sensors, DNA server enabled3: DroneCAN driver enabled for sensors and ESCs, DNA server enabled
2 or 3 are recommended, if DNA is supported.
DroneCan Subscriptions & Publications
PX4 does not publish or subscribe to DroneCAN messages that might be needed by default, in order to avoid spamming the CAN bus. Instead you must enable publication or subscription to the messages associated with a particular feature by setting the associated UAVCAN parameter.
INFO
Sensor parameters may not exist (be visible in QGC) until you have enabled the associated DroneCAN sensor subscription!
For example, SENS_FLOW_MINHGT does not exist until UAVCAN_SUB_FLOW is enabled.
For example, to use a connected DroneCAN smart battery you would enable the UAVCAN_SUB_BAT parameter, which would subscribe PX4 to receive BatteryInfo DroneCAN messages. If using a peripheral that needs to know if PX4 is armed, you would need to set the UAVCAN_PUB_ARM parameter so that PX4 starts publishing ArmingStatus messages.
The parameter names are prefixed with UAVCAN_SUB_ and UAVCAN_PUB_ to indicate whether they enable PX4 subscribing or publishing. The remainder of the name indicates the specific message/feature being set.
DroneCAN peripherals connected to PX4 can also be configured using parameters via QGC. By convention, parameters named with the prefix CANNODE_ have prefined meaning, and may be documented in the parameter reference. CANNODE_ parameters prefixed with CANNODE_PUB_ and CANNODE_SUB_ enable the peripheral to publish or subscribe the associated DroneCAN message. These allow DroneCAN peripherals to be configured to only subscribe and publish messages that they actually need (in the same way that PX4 uses the corresponding UAVCAN_PUB_/UAVCAN_SUB_ parameters). Note that a peripheral might not use CANNODE_ parameters, in which case it may have to publish/subscribe to particular messages whether or not they are needed.
The following sections provide additional detail on the PX4 and DroneCAN peripheral parameters used to enable particular features.
센서
The DroneCAN sensor parameters/subscriptions that you can enable are (in PX4 v1.14):
- UAVCAN_SUB_ASPD: Airspeed
- UAVCAN_SUB_BARO: Barometer
- UAVCAN_SUB_BAT: Battery monitor/Power module
- UAVCAN_SUB_BTN: Button
- UAVCAN_SUB_DPRES: Differential pressure
- UAVCAN_SUB_FLOW: Optical flow
- UAVCAN_SUB_GPS: GPS
- UAVCAN_SUB_GPS_RPX4 v1.15: Subscribes to GNSS relative message (RelPosHeading). Only used for logging in PX4 v1.15.
- UAVCAN_SUB_HYGRO: Hygrometer
- UAVCAN_SUB_ICE: Internal combustion engine (ICE).
- UAVCAN_SUB_IMU: IMU
- UAVCAN_SUB_MAG: Magnetometer (compass)
- UAVCAN_SUB_RNG: Range finder (distance sensor).
GPS
PX4 DroneCAN parameters:
- Enable UAVCAN_SUB_GPS.
- Enable UAVCAN_SUB_MAG if the GPS module has an inbuilt compass.
GPS CANNODE parameter (set using QGC):
- Set CANNODE_TERM to
1for the last node on the CAN bus.
Other PX4 Parameters:
- If the GPS is not positioned at the vehicle centre of gravity you can account for the offset using SENS_GPS0_OFFX, SENS_GPS0_OFFY and SENS_GPS0_OFFZ.
- If the GPS module provides yaw information, you can enable GPS yaw fusion by setting bit 3 of EKF2_GPS_CTRL to true.
RTK GPS
Set the same parameters as for GPS above. In addition, you may also need to set the following parameters depending on whether your RTK setup is Rover and Fixed Base, or Rover and Moving Base, or both.
Rover and Fixed Base
Position of rover is established using RTCM messages from the RTK base module (the base module is connected to QGC, which sends the RTCM information to PX4 via MAVLink).
PX4 DroneCAN parameters:
- UAVCAN_PUB_RTCM:
- Makes PX4 publish RTCM messages (RTCMStream) to the bus (which it gets from the RTK base module via QGC).
Rover module parameters (also set using QGC):
- CANNODE_SUB_RTCM tells the rover that it should subscribe to RTCMStream RTCM messages on the bus (from the moving base).
INFO
You could instead use UAVCAN_PUB_MBD and CANNODE_SUB_MBD, which also publish RTCM messages (these are newer). Using the RTCMStream message means that you can implement moving base (see below) at the same time.
Rover and Moving Base
As discussed in RTK GPS Heading with Dual u-blox F9P a vehicle can have two RTK modules in order to calculate yaw from GPS. In this setup the vehicle has a moving base RTK GPS and a rover RTK GPS.
These parameters can be set on moving base and rover RTK CAN nodes, respectively:
- CANNODE_PUB_MBD causes a moving base GPS unit to publish MovingBaselineDataRTCM messages onto the bus (for the rover)
- CANNODE_SUB_MBD tells the rover that it should subscribe to MovingBaselineData RTCM messages on the bus (from the moving base).
For PX4 you will also need to set GPS_YAW_OFFSET to indicate the relative position of the moving base and rover: 0 if your Rover is in front of your Moving Base, 90 if Rover is right of Moving Base, 180 if Rover is behind Moving Base, or 270 if Rover is left of Moving Base.
기압계
PX4 DroneCAN parameters:
- Enable UAVCAN_SUB_BARO.
나침반
PX4 DroneCAN parameters:
- Enable UAVCAN_SUB_MAG.
Distance Sensor/Range Finder
PX4 DroneCAN parameters:
- Enable UAVCAN_SUB_RNG.
- Set UAVCAN_RNG_MIN and UAVCAN_RNG_MAX, the minimum and maximum range of the distance sensor.
Other PX4 parameters:
- If the rangefinder is not positioned at the vehicle centre of gravity you can account for the offset using EKF2_RNG_POS_X, EKF2_RNG_POS_Y and EKF2_RNG_POS_Z.
- Other
EKF2_RNG_*parameters may be relevant, in which case they should be documented with the specific rangefinder.
Optical Flow Sensor
PX4 DroneCAN parameters:
- Enable UAVCAN_SUB_FLOW.
Other PX4 parameters:
- Set SENS_FLOW_MINHGT and SENS_FLOW_MAXHGT, the minimum and maximum height of the flow sensor.
- Set SENS_FLOW_MAXR the maximum angular flow rate of the sensor.
- Enable optical flow fusion by setting EKF2_OF_CTRL.
- To disable GPS aiding (optional), set EKF2_GPS_CTRL to
0. - If the optical flow unit is not positioned at the vehicle centre of gravity you can account for the offset using EKF2_OF_POS_X, EKF2_OF_POS_Y and EKF2_OF_POS_Z.
Optical flow sensors require rangefinder data. However the rangefinder need not be part of the same module, and if not, may not be connected via DroneCAN. If the rangefinder is connected via DroneCAN (whether inbuilt or separate), you will also need to enable it as described in the rangefinder section (above).
Arming Peripherals
PX4 DroneCAN parameters:
- UAVCAN_PUB_ARM (Arming Status): Publish when using DroneCAN components that require the PX4 arming status as a precondition for use.
ESC & Servos
DroneCAN ESCs and servos require the motor order and servo outputs to be configured.
Select the specific CAN interface(s) used for ESC data output using the UAVCAN_ESC_IFACE parameter (all that all interfaces are selected by default). Note that DroneCAN ESCs should be on their own dedicated CAN interface(s) because ESC messages can saturate the bus and starve other nodes of bandwidth.
Lights
PX4 can control external LEDs on a connected DroneCAN peripheral using the standard DroneCAN LightsCommand message. Up to 2 lights acan be controlled. Each light can independently show system status colours, a fixed colour (commonly used for indicating aircraft orientation), or switch between both depending on arm state.
See DroneCAN Lights for full configuration details.
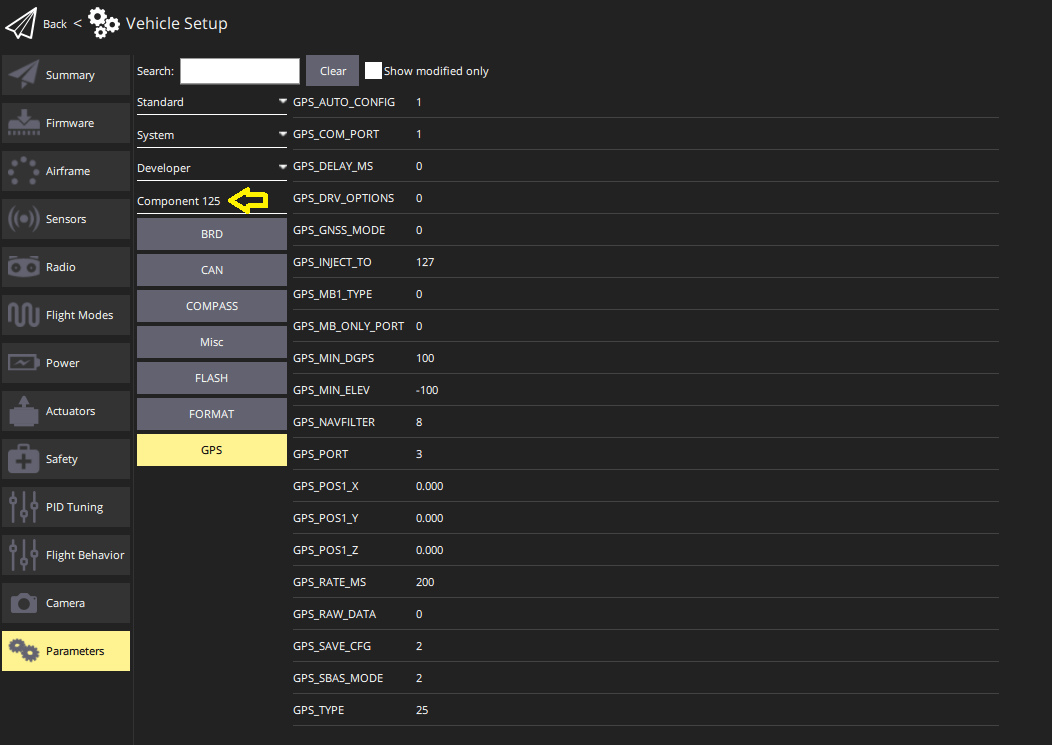
QGC CANNODE Parameter Configuration
QGroundControl can inspect and modify parameters belonging to CAN devices attached to the flight controller, provided the device are connected to the flight controller before QGC is started.
CAN nodes are displayed separate sections in Vehicle Settings > Parameters named Component X, where X is the node ID. For example, the screenshot below shows the parameters for a CAN GPS with node id 125 (after the Standard, System, and Developer parameter groupings).
Common CANNODE parameters that you can configure include:
- CANNODE_NODE_ID: Set a static node ID (1-125) or use 0 for dynamic allocation. See PX4 DroneCAN Firmware > Static Node ID for more information.
- CANNODE_TERM: Enable CAN bus termination on the last node in the bus.
Device Specific Setup
Most DroneCAN nodes require no further setup, unless specifically noted in their device-specific documentation.
펌웨어 업데이트
PX4 can upgrade device firmware over DroneCAN.
INFO
PX4 identifies valid firmware binaries (.bin) based on the presence of an APDescriptor — a metadata block embedded in the .bin file that contains the target board ID, firmware version, and a checksum. PX4 uses this descriptor to match each binary to the correct node and to determine whether an update is needed.
Firmware Directories
Place firmware binaries in one of these locations on the SD card before rebooting:
- SD card root (
/fs/microsd/): Simplest option for manual updates. - Staging directory (
/fs/microsd/ufw_staging/): Preferred for remote/programmatic updates. Files are moved to/fs/microsd/ufw/at boot before any node is flashed, avoiding write conflicts if firmware is uploaded while the vehicle is running.
On boot, PX4 scans both locations, reads the board ID from the APDescriptor of each file, and copies them to /fs/microsd/ufw/<board_id>.bin. The source file is then deleted. Any connected node whose running version does not match is then flashed over the CAN bus.
Remote Update
Remote updates can be made by uploading the corresponding bin files to /fs/microsd/ufw_staging/. PX4 will then update firmware on next boot.
This approach enables efficient mass-update of binaries from archives (.zip or .tar that contains .bin files for the target CAN nodes).
INFO
Auterion uses a form of this workflow to update CAN firmware to SkyNode based devices. The upload_skynode.sh script with multiple --ext-fw flags is used to bundle a number of firmware files and upload them to a directory on the companion-computer part.
./Tools/auterion/upload_skynode.sh \
--ext-fw=build/auterion_canio_default/auterion_canio_default.uavcan.bin
--ext-fw=build/auterion_canio_default/another_default.uavcan.bin
...
--ext-fw=build/auterion_canio_default/some_other_default.uavcan.binAnother tool then checks which files were already uploaded using a local database and extracts just the relevant files to the PX4 firmware staging area.
문제 해결
Q: My DroneCAN devices aren't working.
A: Check that the UAVCAN_ENABLE parameter is set correctly. To see a list of devices/nodes that PX4 has detected on the CAN bus, open NSH (i.e. go to the QGroundControl MAVLink Console) and type uavcan status.
Q: The DNA server isn't giving out node IDs.
A: PX4 requires an SD card to perform dynamic node allocation. Make sure you have (a working) one inserted and reboot.
Q: The motors aren't spinning when armed.
A:
- Make sure
UAVCAN_ENABLEis set to3to enable DroneCAN ESC output. - Make sure
UAVCAN_ESC_IFACEis set to enable the CAN interface(s) used for ESCs.
Q: The motors don't spin until throttle is increased.
A: Use Acutator > Actuator Testing to confirm that the motor outputs are set to the correct minimum values.
Useful Links
- Home Page (dronecan.github.io)
- Protocol Specification (dronecan.github.io)
- Implementations (dronecan.github.io)
- Cyphal/CAN Device Interconnection (kb.zubax.com)