Траєкторія Jerk-limited типу для Мультикоперів
Тип траєкторії з обмеженим рухом джерка забезпечує плавний рух у відповідь на введення палиці користувача або зміни місії (наприклад: для зйомки, картографування, вантажу). Він генерує симетричні плавні S-криві, де обмеження різкості та прискорення завжди гарантовані.
This trajectory type is always enabled in Mission mode. To enable it in Position mode set the parameter MPC_POS_MODE to Smoothed velocity.
INFO
The jerk-limited type is not used by default in position mode. Це може бути не підходить для транспортних засобів / випадків використання, які вимагають швидкої відповіді - наприклад, гонщицькі квадрокоптери.
Генератор траєкторії
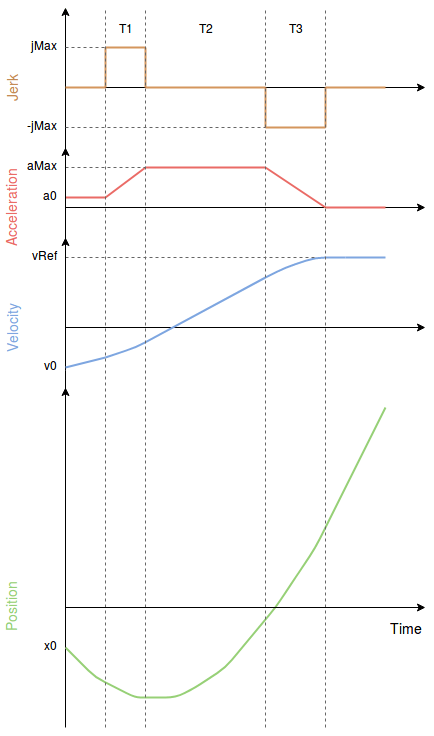
Графік нижче показує типовий профіль обмеження ривка з наступними обмеженнями:
jMax: maximum jerka0: initial accelerationaMax: maximum accelerationa3: final acceleration (always 0)v0: initial velocityvRef: desired velocity
The constraints jMax, aMax are configurable by the user via parameters and can be different in manual position control and auto mode.
Отриманий профіль швидкості часто називають "S-кривою".
Ручний режим
In manual position mode, the sticks are mapped to velocity where a full XY-stick deflection corresponds to MPC_VEL_MANUAL and a full Z-stick deflection corresponds to MPC_Z_VEL_MAX_UP (upward motion) or MPC_Z_VEL_MAX_DN (downward motion).
Обмеження
XY-plane:
jMax: MPC_JERK_MAXaMax: MPC_ACC_HOR_MAX
Z-axis:
jMax: MPC_JERK_MAXaMax(upward motion): MPC_ACC_UP_MAXaMax(downward motion): MPC_ACC_DOWN_MAX
Автоматичний режим
In auto mode, the desired velocity is MPC_XY_CRUISE but this value is automatically adjusted depending on the distance to the next waypoint, the maximum possible velocity in the waypoint and the maximum desired acceleration and jerk. The vertical speed is defined by MPC_Z_V_AUTO_UP (upward motion) and MPC_Z_V_AUTO_DN (downward motion).
Обмеження
XY-plane:
jMax: MPC_JERK_AUTOaMax: MPC_ACC_HOR
Z-axis:
jMax: MPC_JERK_AUTOaMax(upward motion): MPC_ACC_UP_MAXaMax(downward motion): MPC_ACC_DOWN_MAX
Відстань до отримання швидкості, коли близько до точки маршруту: