Диспетчер польотів CUAV Nora
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
The Nora® flight controller is a high-performance autopilot. Це ідеальний вибір для промислових дронів і великомасштабних важких дронів. В основному постачається комерційним виробникам.
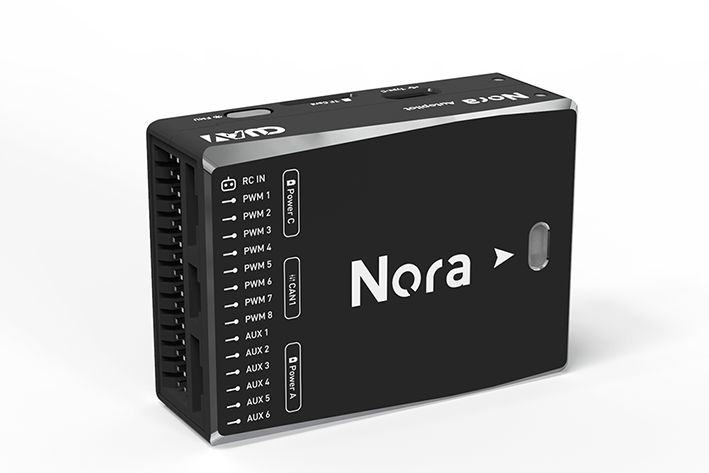
Нора - це варіант CUAV X7. Він використовує інтегровану материнську плату (м'яку і тверду), що зменшує кількість внутрішніх роз'ємів польотного контролера, підвищує надійність і розміщує всі інтерфейси збоку (роблячи проводку більш лаконічною).
INFO
This flight controller is manufacturer supported.
Функції
- Внутрішнє поглинання ударів
- Інтегрований процес зменшує відмову, спричинену пошкодженням інтерфейсу.
- Підтримка USB_HS, швидше завантаження журналів (PX4 ще не підтримується)
- Підтримка більшої кількості виходів dshot
- Підтримка нагріву IMU, покращення роботи датчика
- Виділений порт для акумулятора CAN
- 3 комплекти датчиків IMU
- Автомобільний компас RM3100
- Високопродуктивний процесор
TIP
The manufacturer CUAV Docs are the canonical reference for Nora. Вони повинні використовуватися за перевагою, оскільки вони містять найбільш повну та актуальну інформацію.
Короткий опис
Головний FMU процесор: STM32H743
Бортові сенсори:
- Акселерометр/Гіроскоп: ICM-20689
- Прискорювач/гіроскоп: ICM-20649
- Акселерометр/Гіроскоп: BMI088
- Магнітометр: RM3100
- Барометр: MS5611*2
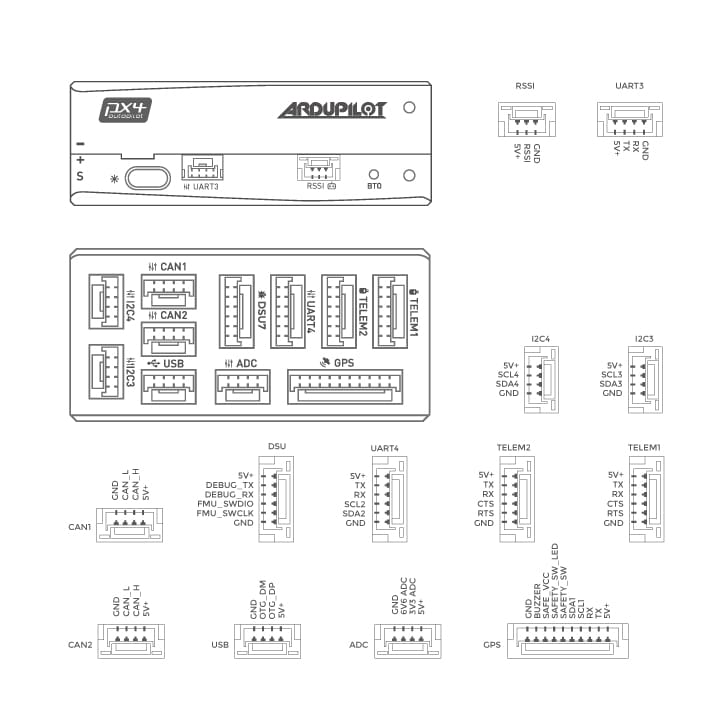
Інтерфейси:
- 14 ШІМ-виходів (12 підтримує Dshot)
- Підтримка декількох входів RC (SBU / CPPM / DSM)
- Аналоговий / PWM вхід RSSI
- 2 GPS порти (GPS і UART4 порти)
- 4 шини i2c (два виділені порти i2c)
- 2 порти CAN шини
- 2 порти живлення (Power A - загальний інтерфейс адаптера, Power C - інтерфейс акумулятора DroneCAN)
- 2 входи АЦП
- 1 USB порт
Система живлення:
- Живлення: 4.3~5.4В
- Вхід USB: 4.75~5.25В
- Вхід сервоприводу: 0~36V
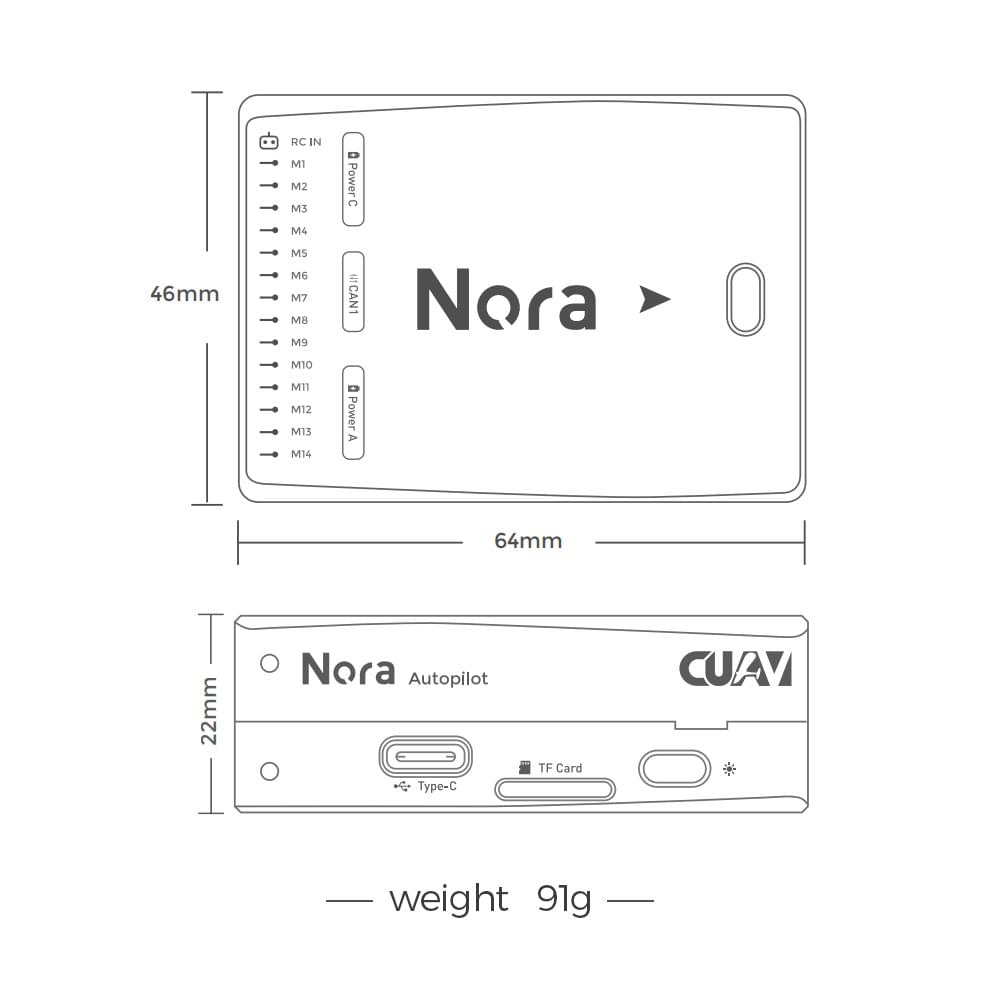
Вага та розміри:
- Вага: 101 g
Інші характеристики:
- Робоча температура: -20 ~ 80°c (виміряне значення)
- Три імуси
- Підтримка компенсації температури
- Внутрішнє поглинання ударів
INFO
When it runs PX4 firmware, only 8 PWM outputs work. Решта 6 ШІМ-портів все ще адаптуються (тому на момент написання статті вони не сумісні з VOLT).
Where to Buy
З'єднання (Проводка)
Розмір та роз'єми
WARNING
The RCIN port is limited to powering the rc receiver and cannot be connected to any power/load.
Номінальна напруга
Nora AutoPilot* може мати потрійне резервування джерела живлення, якщо до нього підключено три джерела живлення. The two power rails are: POWERA, POWERC and USB.
INFO
The output power rails PWM OUT (0V to 36V) do not power the flight controller board (and are not powered by it). You must supply power to one of POWERA, POWERC or USB or the board will be unpowered.
Normal Operation Maximum Ratings
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWERA and POWERC inputs (4.3V to 5.4V)
- USB input (4.75V to 5.25V)
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make cuav_nora_defaultЗахист від перенапруги
The Nora has over-current protection on the 5 Volt Peripheral and 5 Volt high power, which limits the current to 2.5A. The Nora has short circuit protection.
WARNING
Up to 2.5 A can be delivered to the connectors listed as pin 1 (although these are only rated at 1 A).
Відладочний порт
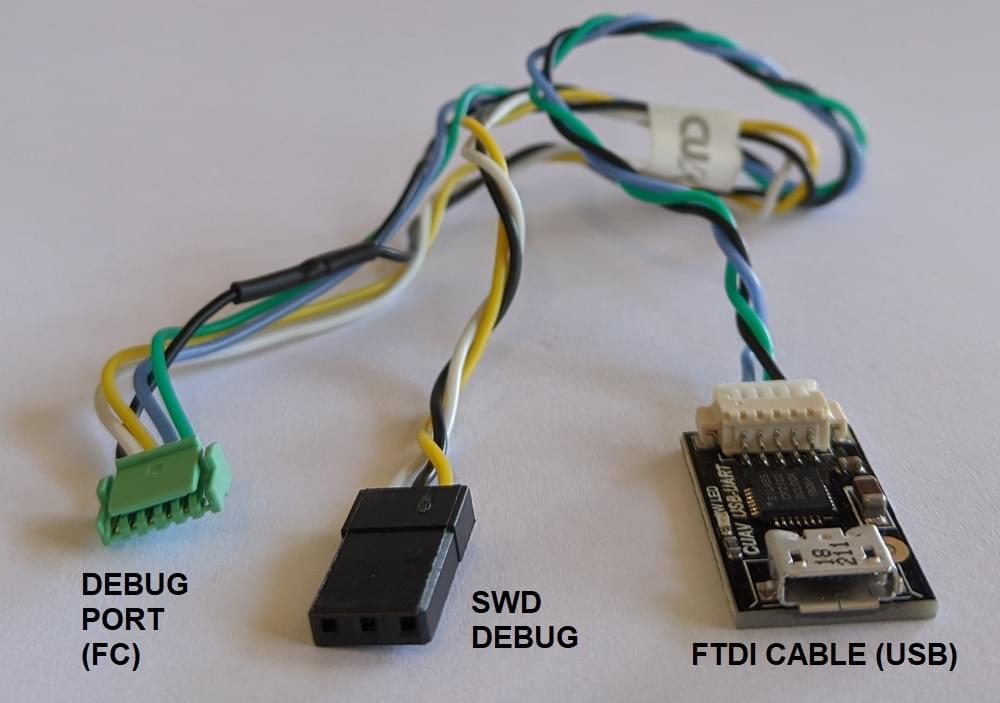
The system's serial console and SWD interface operate on the DSU7 port. Просто підключіть кабель FTDI до роз'єму DSU7 (у списку продуктів є кабель CUAV FTDI).
The PX4 System Console and SWD interface operate on the FMU Debug port (DSU7).
The debug port (DSU7) uses a JST BM06B connector and has the following pinout:
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | 5V+ | +5V |
| 2 (blk) | DEBUG TX (OUT) | +3.3V |
| 3 (blk) | DEBUG RX (IN) | +3.3V |
| 4 (blk) | FMU_SWDIO | +3.3V |
| 5 (blk) | FMU_SWCLK | +3.3V |
| 6 (blk) | GND | GND |
CUAV provides a dedicated debugging cable, which can be connected to the DSU7 port. This splits out an FTDI cable for connecting the PX4 System Console to a computer USB port, and SWD pins used for SWD/JTAG debugging. The provided debug cable does not connect to the SWD port Vref pin (1).
WARNING
The SWD Vref pin (1) uses 5V as Vref but the CPU is run at 3.3V!
Деякі JTAG-адаптери (SEGGER J-Link) використовують напругу Vref для встановлення напруги на лініях SWD. For direct connection to Segger Jlink we recommended you use the 3.3 Volts from pin 4 of the connector marked DSM/SBUS/RSSI to provide Vtref to the JTAG (i.e. providing 3.3V and NOT 5V).
Підтримувані платформи / Конструкції
Будь-який мультикоптер / літак / наземна платформа / човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. The complete set of supported configurations can be seen in the Airframes Reference.