Режим висоти (мультикоптер)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
")
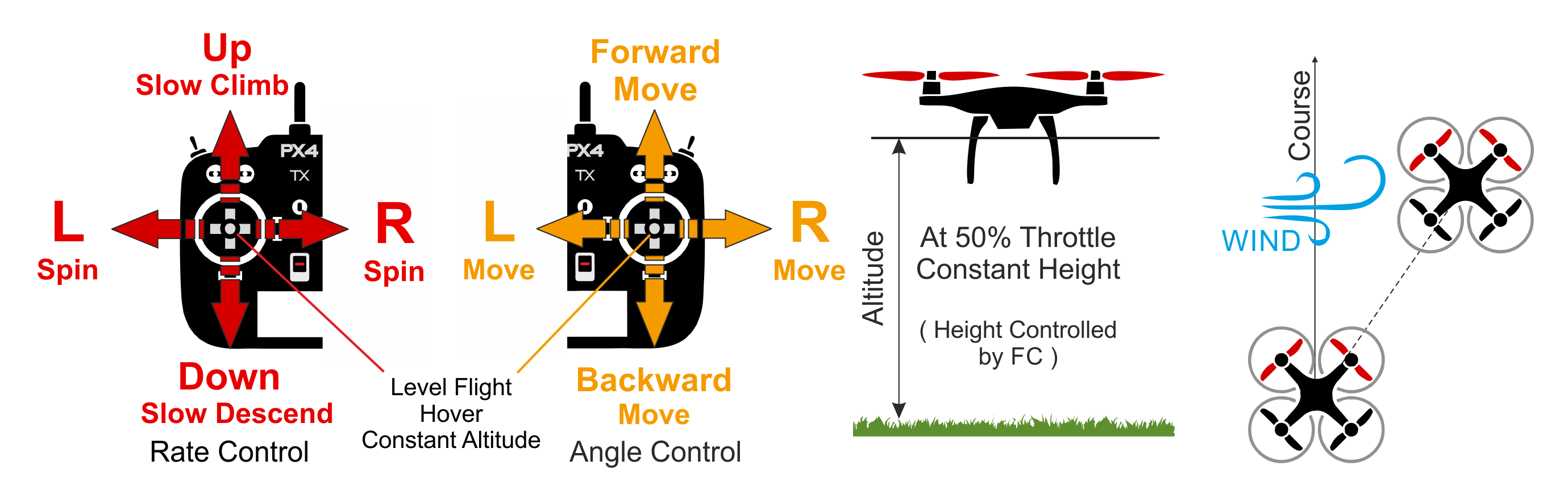
Altitude mode is a relatively easy-to-fly RC mode in which roll and pitch sticks control vehicle movement in the left-right and forward-back directions (relative to the "front" of the vehicle), yaw stick controls rate of rotation over the horizontal plane, and throttle controls speed of ascent-descent.
When the sticks are released/centered the vehicle will level and maintain the current altitude. Якщо апарат рухається в горизонтальній площині, він буде продовжувати рух до тих пір, поки будь-який імпульс не буде погашений опором вітру. Якщо дме вітер, літак буде дрейфувати у напрямку вітру.
TIP
Altitude mode is the safest non-GPS manual mode for new fliers. It is just like Stabilized mode but additionally locks the vehicle altitude when the sticks are released.
The diagram below shows the mode behaviour visually (for a mode 2 transmitter).
Технічний підсумок
RC/manual mode like Stabilized mode but with altitude stabilization (centred sticks level vehicle and hold it to fixed altitude). Горизонтальне положення транспортного засобу може змінюватися через вплив вітру (або наявного імпульсу).
- Centered sticks:
- Рівень RPY прикріплюється до транспортного засобу.
- Дросель (~50%) утримує поточну висоту стабільно проти вітру.
- Зовнішній центр:
- Палиці кочення/крену керують кут нахилу у відповідних орієнтаціях, що призводить до відповідного руху ліворуч-праворуч та вперед-назад.
- Ручка дроселя керує швидкістю вгору/вниз з попередньо визначеною максимальною швидкістю (та швидкістю руху в інших осях).
- Палиця крену контролює швидкість кутової ротації вище горизонтальної площини.
- Зліт:
- Після посадки транспортний засіб злетить, якщо важіль керування газом підніметься вище 62.5% від повного діапазону (від низу).
- Висота зазвичай вимірюється за допомогою барометра, який може стати неточним в екстремальних погодних умовах. Транспортні засоби, які включають датчик LIDAR/дальнісний датчик, зможуть керувати висотою з більшою надійністю та точністю.
- Потрібен ручний ввід управління (наприклад, за допомогою пульта дистанційного керування, джойстика).
- Крен, Тангаж: Допомога від автопілота для стабілізації польоту. Положення палиці RC відображає орієнтацію транспортного засобу.
- Газ: Допомога від автопілота для утримання позиції проти вітру.
- Курс: Допомога від автопілота для стабілізації швидкості польоту. Положення палиці RC відображає швидкість обертання транспортного засобу в цій орієнтації.
Параметри
Режим впливає на наступні параметри:
| Parameter | Опис |
|---|---|
| MPC_Z_VEL_MAX_UP | Максимальна швидкість вертикального підйому. За замовчуванням: 3 м/с. |
| MPC_Z_VEL_MAX_DN | Максимальна швидкість вертикального спуску. За замовчуванням: 1 m/s. |
MPC_XXXX | Більшість параметрів MPC_xxx впливають на поведінку польоту в цьому режимі (принаймні до певної міри). For example, MPC_THR_HOVER defines the thrust at which a vehicle will hover. |