Режим позиції (мультикоптер)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
")
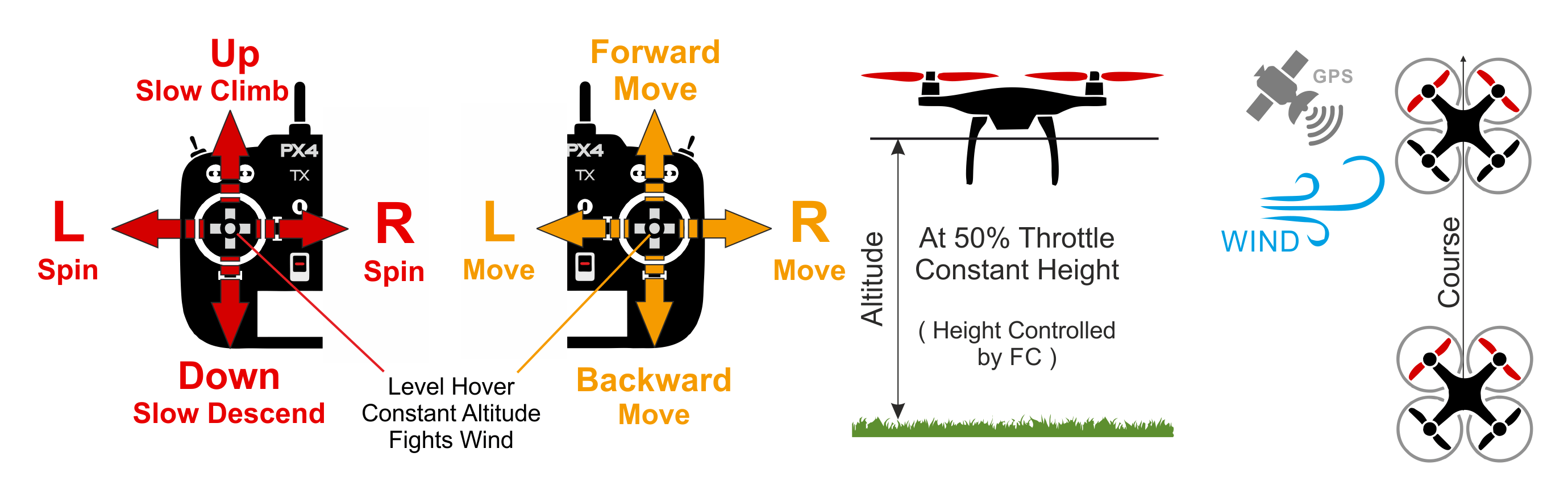
Position is an easy-to-fly RC mode in which roll and pitch sticks control acceleration over ground in the vehicle's left-right and forward-back directions (similar to a car's accelerator pedal), and throttle controls speed of ascent-descent. Коли стіки відпускаються/центруються, автомобіль активно гальмує, вирівнюється і фіксується в певному положенні в 3D-просторі — компенсуючи вітер та інші сили. With full stick deflection the vehicle accelerates initially with MPC_ACC_HOR_MAX ramping down until it reaches the final velocity MPC_VEL_MANUAL.
TIP
Position mode is the safest manual mode for new fliers. Unlike Altitude and Stabilized modes the vehicle will stop when the sticks are centered rather than continuing until slowed by wind resistance.
Діаграма нижче візуально показує поведінку режиму (для передавача режиму 2).
Посадка
Приземлення в цьому режимі легко:
- Розмістіть дрон горизонтально над місцем посадки, використовуючи палиці кочення та тангажу.
- Відпустіть рукоятку кочення і тангажу та дайте їй достатньо часу, щоб повністю зупинитися.
- Потягніть палицю газу вниз обережно, доки транспортний засіб не доторкнеться до землі.
- Тягніть палицю газу до максимуму, щоб полегшити і прискорити виявлення землі.
- The vehicle will lower propeller thrust, detect the ground and automatically disarm (by default).
WARNING
While very rare on a well calibrated vehicle, sometimes there may be problems with landing.
- Якщо транспортний засіб не зупиняється горизонтально:
- You can still land under control in Altitude mode. Підхід такий самий, як у вищезазначеному випадку, за винятком того, що вам потрібно вручну забезпечити, щоб транспортний засіб залишався вище місця посадки, використовуючи руль і підйомний механізм.
- Після приземлення перевірте орієнтацію GPS та магнітометра, калібруйте.
- Якщо транспортний засіб не виявляє землю/посадку і не роззброюється:
- After the vehicle is on the ground switch to Stabilized mode keeping the throttle stick low, and manually disarm using a gesture or other command. За потреби ви також можете використовувати вимикач вимкнення, коли транспортний засіб вже знаходиться на землі.
Технічний підсумок
Режим RC, де рульові, кренові, керування газом (RPT) керують рухом у відповідних осях/напрямках. Центральні палиці рівняють транспортний засіб і утримують його на фіксованій висоті та позиції проти вітру.
- Centered roll, pitch, throttle sticks (within RC deadzone MAN_DEADZONE) hold x, y, z position steady against any disturbance like wind.
- Зовнішній центр:
- Ручки кочення/крена керують горизонтальним прискоренням над землею у ліво-правому та передньо-задньому напрямках транспортного засобу (відповідно).
- Палиця дросельного клапана контролює швидкість підйому-спуску.
- Палиця крену контролює швидкість кутової ротації вище горизонтальної площини.
- Зліт:
- Після посадки транспортний засіб злетить, якщо важіль керування газом підніметься вище 62.5% від повного діапазону (від низу).
- Потрібна глобальна оцінка положення.
- Потрібен ручний ввід управління (наприклад, за допомогою пульта дистанційного керування, джойстика).
- Крен, Тангаж, Газ: Допомога від автопілота для утримання позиції проти вітру.
- Курс: Допомога від автопілота для стабілізації швидкості польоту. Положення палиці RC відображає швидкість обертання транспортного засобу в цій орієнтації.
Параметри
All the parameters in the Multicopter Position Control group are relevant. Декілька параметрів, на які варто звернути увагу, перераховані нижче.
| Parameter | Опис |
|---|---|
| MAN_DEADZONE | Мертва зона палиць, де активовано утримання позиції. За замовчуванням: 0.1 (10% від повного діапазону палиці). |
| MPC_Z_VEL_MAX_UP | Максимальна швидкість вертикального підйому. За замовчуванням: 3 м/с. |
| MPC_Z_VEL_MAX_DN | Максимальна швидкість вертикального спуску. За замовчуванням: 1 m/s. |
| MPC_LAND_ALT1 | Висота для спрацювання першої фази повільної посадки. Below this altitude descending velocity gets limited to a value between MPC_Z_VEL_MAX_DN (or MPC_Z_V_AUTO_DN) and MPC_LAND_SPEED. Value needs to be higher than MPC_LAND_ALT2. За замовчуванням 10м. |
| MPC_LAND_ALT2 | Висота для другої фази повільної посадки. Below this altitude descending velocity gets limited to MPC_LAND_SPEED. Значення повинно бути нижче, ніж "MPC_LAND_ALT1". Значення за замовчуванням: 5m. |
MPC_XXXX | Більшість параметрів MPC_xxx впливають на поведінку польоту в цьому режимі (принаймні до певної міри). For example, MPC_THR_HOVER defines the thrust at which a vehicle will hover. |
| MPC_POS_MODE | Стратегія перекладу введення на рух. From PX4 v1.12 the default (Acceleration based) is that stick position controls acceleration (in a similar way to a car accelerator pedal). Інші параметри дозволяють відхилення палиці безпосередньо контролювати швидкість над землею, з і без згладжування та обмежень прискорення. |
| MPC_ACC_HOR_MAX | Максимальне горизонтальне прискорення. |
| MPC_VEL_MANUAL | Максимальна горизонтальна швидкість. |
| MPC_LAND_SPEED | Швидкість спуску на посадку. За замовчуванням: 0.7 m/s. |
Додаткова інформація
Втрата позиції / безпека
Режим позиціонування залежить від наявності прийнятної оцінки позиції. If the estimate falls below acceptable levels, for example due to GPS loss, this may trigger a Position (GPS) Loss Failsafe. Залежно від конфігурації, наявності пульта дистанційного керування та наявності достатньої оцінки висоти, PX4 може переключитися в режим висоти, ручний режим, режим посадки або завершити роботу.