FunCub QuadPlane (Pixhawk)
QuadPlane VTOL Fun Cub є стандартним повітряним судном з хвостовим оперенням (Multiplex FunCub), яке було модернізовано з системою QuadCopter.
Основна Інформація:
- Frame: Multiplex FunCub
- Flight controller: Pixhawk

Без змін, Fun Cub - це відносно доступний літак і відносно легкий у польоті. Після конвертації літак стає значно важчим і менш аеродинамічним. Він все ще досить добре літає, але потребує близько 75% газу у польоті вперед.
Специфікація матеріалів
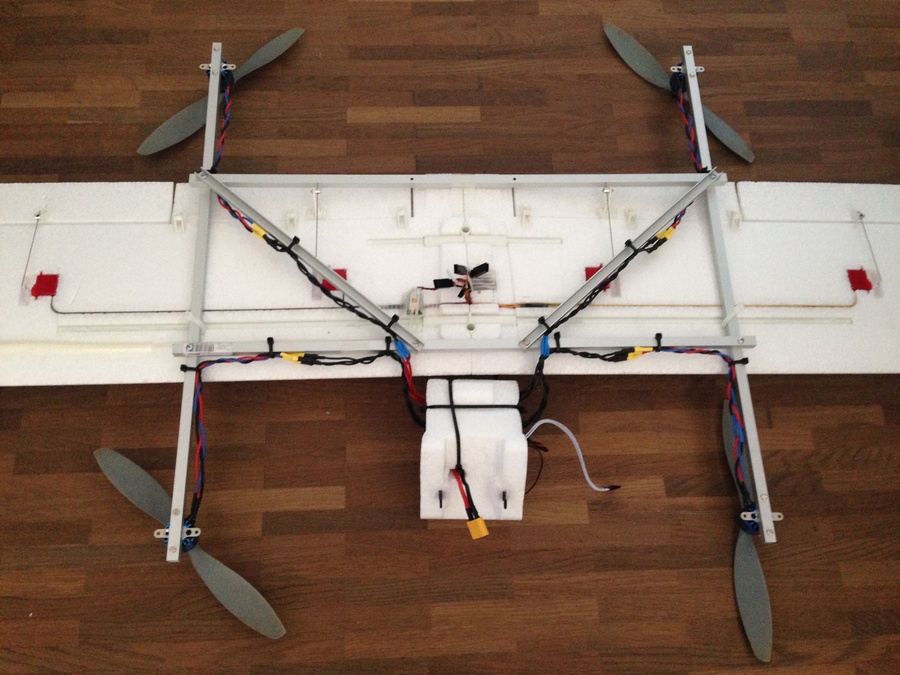
Справжній літак приблизно виглядає так, як показано на зображенні вище (інші схожі моделі також підійдуть добре - це Multiplex Fun Cub).
Мінімально необхідне обладнання:
- Multiplex FunCub (або подібний)
- Pixhawk або сумісний
- Цифровий датчик швидкості польоту
- 900 кВ двигуни (наприклад, комплект пропульсії Iris - двигуни та регулятори швидкості)
- 10" пропелери для квадрокоптерів (10х45 або 10х47)
- 10" гвинт для мотора фіксованого крила (10×7)
- Модуль GPS
- Батарея 4S
- Алюмінієва рама для кріплення двигунів квадрокоптера (квадратна труба 10х10 мм, стінка 1 мм)
- TOW важить ~2.3кг з батареєю 4S на 4200mAh
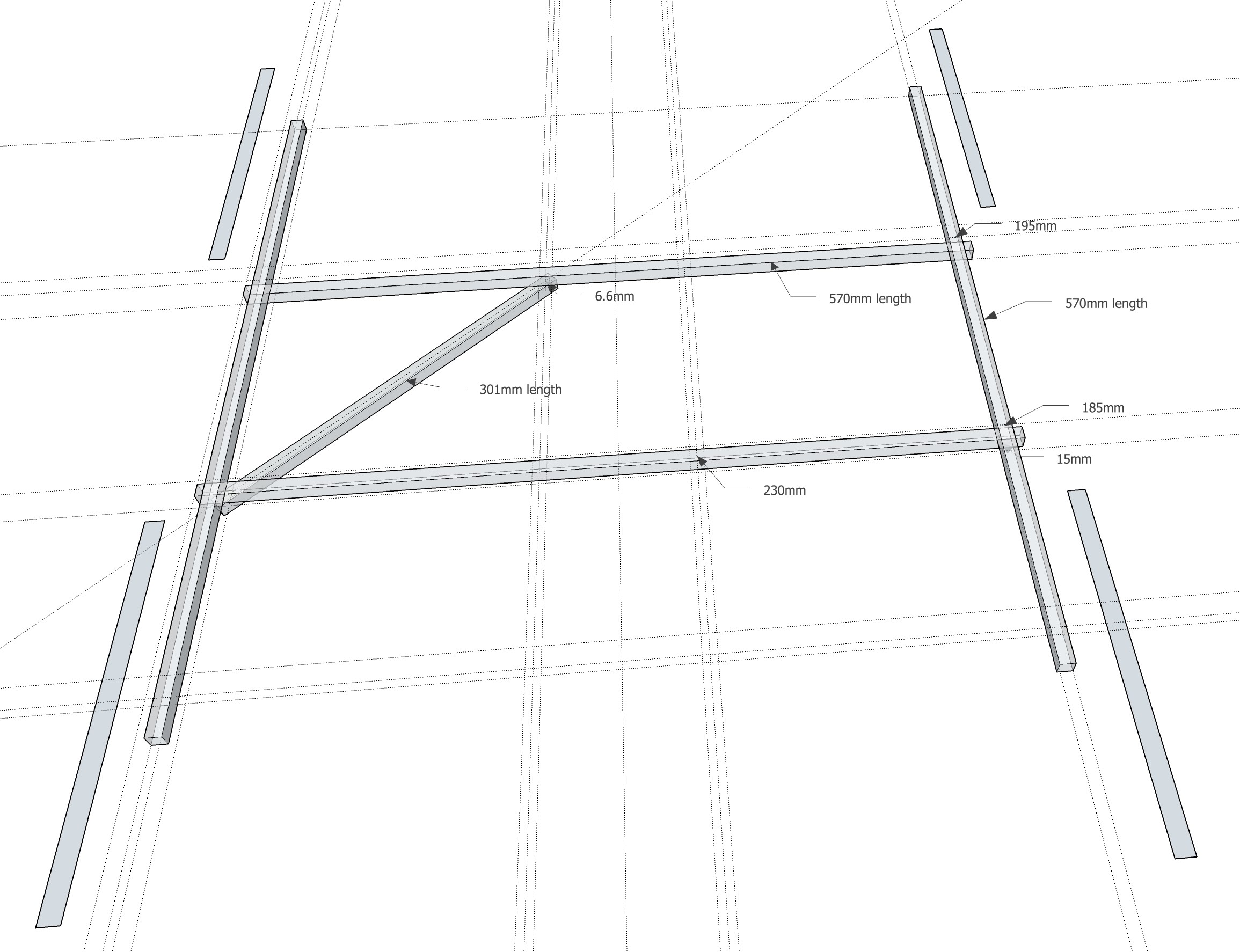
Структура
Структура виготовлена з алюмінієвих стрижнів, як показано нижче.
Підключення
Motor and servo wiring is nearly entirely up to you, but should match the Generic Standard VTOL configuration, as shown in the airframe reference. The geometry and output assignment can be configured in the Actuators Configuration
For example, you might wire it up like this example (orientation as if "sitting in the plane"):
| Порт | Підключення |
|---|---|
| MAIN 1 | Передній правий мотор (CCW) |
| MAIN 2 | Задній лівий мотор (CCW) |
| MAIN 3 | Передній лівий мотор (CW) |
| MAIN 4 | Правий задній мотор (CW) |
| AUX 1 | Лівий елерон TODO |
| AUX 2 | Right aileron |
| AUX 3 | Elevator |
| AUX 4 | Rudder |
| AUX 5 | Throttle |
For further instructions on wiring and configurations please see: Standard VTOL Wiring and Configuration.
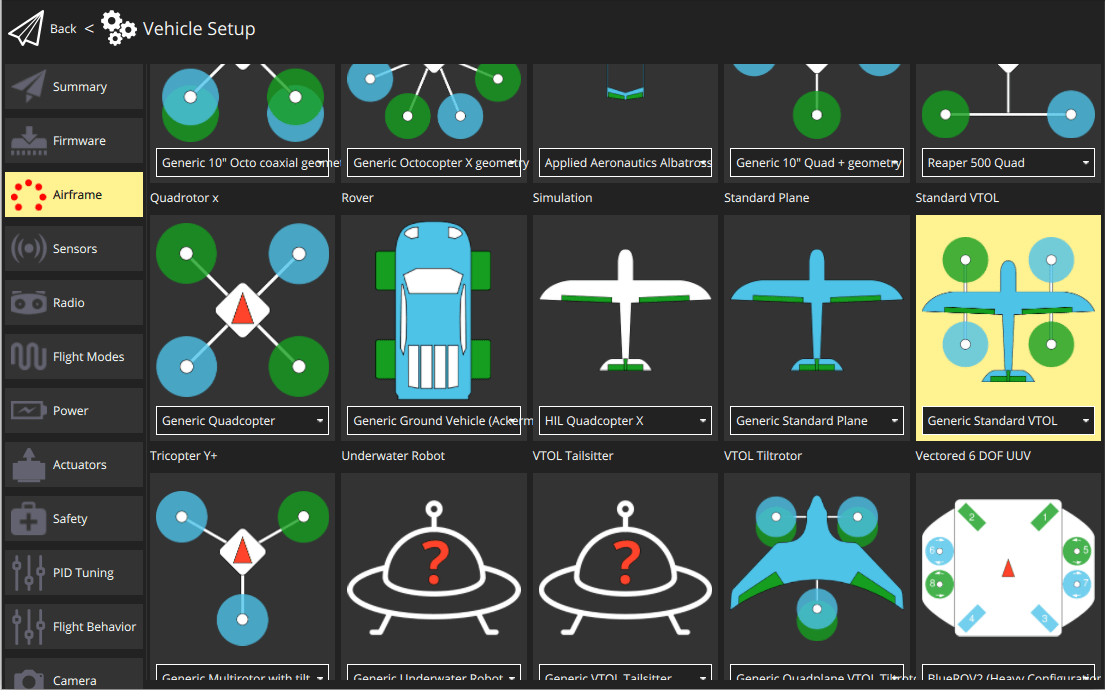
Конфігурація планера
For Airframe select the vehicle group/type as Standard VTOL and the specific vehicle as Generic Standard VTOL as shown below (do not forget to click Apply and Restart in the top).
Configure the outputs and geometry following the instructions in Actuators Configuration
The default parameters are often sufficient for stable flight. For more detailed tuning information see Standard VTOL Wiring and Configuration.
After you finish calibration the VTOL is ready to fly.