Оптичний потік(Optical Flow)
Optical Flow uses a downward facing camera and a downward facing distance sensor for velocity estimation. It can be used to determine speed when navigating without GNSS — in buildings, underground, or in any other GNSS-denied environment.
The video below shows PX4 holding position using the Ark Flow sensor for velocity estimation in Position Mode:
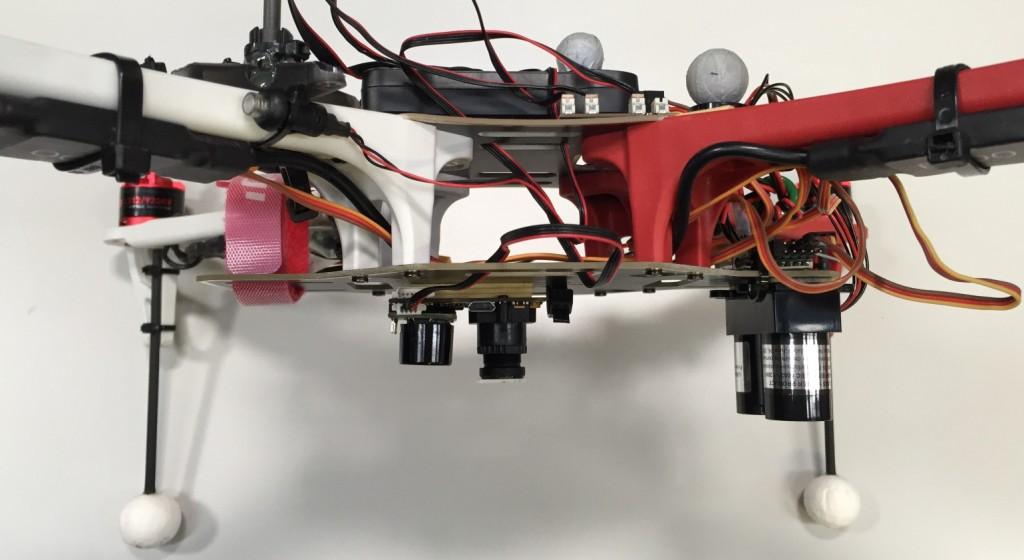
The image below shows an optical flow setup with a separate flow sensor (PX4Flow) and distance sensor (Lidar-Lite):
Установка
An Optical Flow setup requires a downward facing camera and a downward facing distance sensor (preferably a LiDAR). These can be combined in a single product, such as the ARK Flow, ARK Flow MR and Holybro H-Flow, or they may be separate sensors.
The sensor(s) can be connected via MAVLink, I2C or any other bus that supports the peripheral.
INFO
If connected to PX4 via MAVLink the Optical Flow camera sensor must publish the OPTICAL_FLOW_RAD message, and the distance sensor must publish the DISTANCE_SENSOR message. The information is written to the corresponding uORB topics: DistanceSensor and ObstacleDistance.
Вихід потоку при руху в різних напрямках повинен бути наступним:
| Рух транспортного засобу | Інтегрований потік |
|---|---|
| Вперед | + Y |
| Назад | - Y |
| Справа | - X |
| Зліва | + X |
INFO
The integrated flow values are angular measurements (radians) representing rotation of the image about the sensor's body axes using the right-hand convention. They are not translational displacements along those axes, which is why forward vehicle movement (along X) appears in the Y flow axis, and rightward movement (along Y) appears in the X flow axis. Specifically, forward movement causes the ground image to rotate about the Y axis (+ Y), while rightward movement causes a negative rotation about the X axis (- X).
Дані сенсора від пристрою оптичного потоку об'єднуються з іншими джерелами даних швидкості. The approach used for fusing sensor data and any offsets from the center of the vehicle must be configured in the estimator.
Scale Factor
For pure rotations the OPTICAL_FLOW_RAD.integrated_xgyro and OPTICAL_FLOW_RAD.integrated_x (respectively integrated_ygyro and integrated_y) have to be the same. If this is not the case, the optical flow scale factor can be adjusted using SENS_FLOW_SCALE.
TIP
The low resolution of common optical flow sensors can cause slow oscillations when hovering at a high altitude above ground (> 20m). Reducing the optical flow scale factor can improve the situation.
Датчики потоку/Камери
ARK Flow & ARK Flow MR
ARK Flow is a DroneCAN optical flow sensor, distance sensor, and IMU. It has a PAW3902 optical flow sensor, Broadcom AFBR-S50LV85D 30 meter distance sensor, and Invensense ICM-42688-P 6-Axis IMU.
ARK Flow MR is a DroneCAN optical flow sensor, distance sensor, and IMU, for mid-range applications. It has a PixArt PAA3905 optical flow sensor, Broadcom AFBR-S50LX85D 50 meter distance sensor, and Invensense IIM-42653 6-Axis IMU.
Holybro H-Flow
The Holybro H-Flow is a compact DroneCAN optical flow and distance sensor module. It combines a PixArt PAA3905 optical flow sensor, a Broadcom AFBR-S50LV85D distance sensor, and an InvenSense ICM-42688-P 6-axis IMU. An all-in-one design that simplifies installation, with an onboard infrared LED enhances visibility in low-light conditions.
Датчики на основі PMW3901
PMW3901 is an optical flow tracking sensor similar to what you would find in a computer mouse, but adapted to work between 80 mm and infinity. Він використовується в ряді продуктів, включаючи деякі від: Bitcraze, Tindie, Hex, Thone та Alientek.
Інші Камери/Сенсори
Також можна використовувати дошку/квадрокоптер, яка має вбудовану камеру. For this the Optical Flow repo can be used (see also snap_cam).
Далекомір
You can use any supported distance sensor. Проте ми рекомендуємо використовувати LIDAR замість зондів сонар, через їхню надійність та точність.
Оцінювач
Оцінювачі об'єднують дані з датчика оптичного потоку та інших джерел. Налаштування для виконання злиття, а також відносні зсуви до центру транспортного засобу повинні бути вказані для використаного оцінювача.
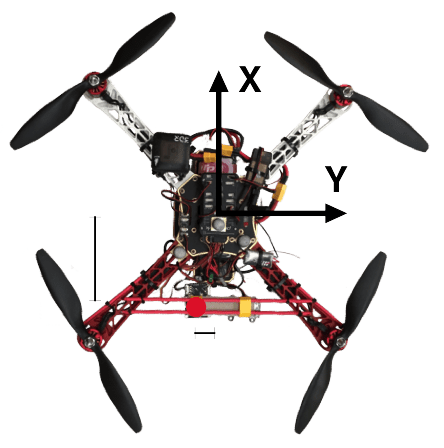
Зміщення обчислюються відносно орієнтації транспортного засобу та центру, як показано нижче:
Optical Flow based navigation is enabled by both EKF2 and LPE (deprecated).
Extended Kalman Filter (EKF2)
For optical flow fusion using EKF2, set EKF2_OF_CTRL.
Якщо ваш оптичний датчик потоку зміщений від центру транспортного засобу, ви можете встановити це за допомогою наступних параметрів.
| Parameter | Опис |
|---|---|
| EKF2_OF_POS_X | Позиція X оптичного потоку фокусної точки в системі тіла (за замовчуванням 0.0 м). |
| EKF2_OF_POS_Y | Позиція Y оптичного потоку фокусної точки в системі тіла (за замовчуванням 0.0 м). |
| EKF2_OF_POS_Z | Позиція Z оптичного потоку фокусної точки в системі тіла (за замовчуванням 0.0 м). |
See Using PX4's Navigation Filter (EKF2) > Optical flow for more information.