Конфігурація Gimbal(стабілізатора)
Ця сторінка пояснює, як налаштувати та контролювати стабілізатор, що має приєднану камеру (або будь-який інший вантаж).
Загальний огляд
PX4 містить універсальний драйвер керування кріпленням/гімбалем, який підтримує різні методи введення та виведення:
- Метод введення визначає протокол, який використовується для керування gimbal mount який керується PX4. Це може бути контролер RC, команда MAVLink, надіслана GCS, або обидва — автоматичне перемикання між ними.
- Метод виведення визначає, як PX4 взаємодіє з підключеним гімбалем. Рекомендований протокол — MAVLink v2, але ви також можете підключитися безпосередньо до виходного порту шим контролера польоту.
PX4 приймає вхідний сигнал і маршрутизує/перекладає його для відправлення на вивід. Будь-який метод введення може бути обраний для керування будь-яким виводом.
Як вхід, так і вихід налаштовуються за допомогою параметрів. Вхід встановлюється за допомогою параметра MNT_MODE_IN. За замовчуванням це встановлено як Вимкнено (-1), і драйвер не запускається. Після вибору режиму введення перезавантажте транспортний засіб, щоб запустити драйвер кріплення.
Ви повинні встановити MNT_MODE_IN одним із наступних: RC (1), Протокол гімбала MAVLink v2 (4) або Авто (0) (інші варіанти застарілі). Якщо ви виберете Авто (0), гімбал автоматично вибере вхід RC або MAVLink відповідно до останнього введення. Зверніть увагу, що для автоматичного перемикання з MAVLink на RC потрібен великий рух ручкою!
Вихід налаштовується за допомогою параметра MNT_MODE_OUT. Усталеним налаштування виходу PXM є (AUX (0)). Якщо ваш гімбал підтримує Протокол гімбала MAVLink v2, ви повинні замість цього вибрати Протокол гімбала MAVLink v2 (2).
Повний список параметрів для налаштування драйвера кріплення можна знайти в Довідці параметрів > Кріплення. Нижче наведено відповідні налаштування для декількох поширених конфігурацій гімбалів.
MAVLink Gimbal (MNT_MODE_OUT=MAVLINK)
Кожен фізичний пристрій гімбала в системі повинен мати свій власний високорівневий менеджер гімбала, який може бути виявлений наземною станцією за допомогою протоколу MAVLink для гімбалів. Наземна станція надсилає високорівневі команди MAVLink Gimbal Manager менеджеру гімбала, який вона хоче керувати, а менеджер, в свою чергу, надсилає відповідні команди нижчого рівня "пристрою гімбала", щоб керувати гімбалом.
PX4 може бути налаштований як менеджер гімбала для керування одним пристроєм гімбала (який може бути або фізично підключений, або бути гімбалом MAVLink, який реалізує інтерфейс пристрою гімбала).
Щоб увімкнути гімбал по протоколу MAVLink, спочатку встановіть параметр MNT_MODE_IN на Протокол гімбала MAVLink v2 і MNT_MODE_OUT на Протокол гімбала MAVLink v2.
Гімбал можна підключити до будь-якого вільного послідовного порту, використовуючи інструкції у розділі Послідовні пристрої MAVLink (GCS/OSD/Компаньйон) (див. також Конфігурація послідовного порту). Наприклад, якщо порт TELEM2 на контролері польоту не використовується, ви можете підключити його до гімбала і встановити наступні параметри PX4:
- MAV_1_CONFIG на TELEM2 (якщо
MAV_1_CONFIGвже використовується для компаньйонного комп'ютера (скажімо), використовуйтеMAV_2_CONFIG). - MAV_1_MODE до NORMAL
- SER_TEL2_BAUD на рекомендовану виробником швидкість передачі даних.
Підтримка декількох Gimbal
PX4 може автоматично створити менеджер гімбала для підключеного гімбала з PWM або першого пристрою гімбала MAVLink з тим самим ідентифікатором системи, який виявляється на будь-якому інтерфейсі. Він не автоматично створює менеджер гімбала для будь-яких інших пристроїв гімбала MAVLink, які виявляються.
Ви можете підтримувати додаткові гімбали, забезпечивши, що вони:
- реалізувати протокол gimbal manager
- Становлять видимими для наземної станції та PX4 у мережі MAVLink. Це може вимагати налаштування пересилання трафіку між PX4, НЗП та гімбалем.
- Кожен гімбал повинен мати унікальний ідентифікатор компонента. Для гімбала, підключеного за допомогою PWM, це буде ідентифікатор компонента автопілота.
Gimbal з FC PWM Output (MNT_MODE_OUT=AUX)
Gimbal також можна контролювати шляхом підключення до трьох портів польоту контролера польоту і налаштування режиму виводу в MNT_MODE_OUT=AUX.
Вихідні піни, які використовуються для керування гімбалем, встановлюються в Конфігурація приводів > Виведення, вибравши будь-які три невикористані виводи приводів та призначивши їм наступні функції виводу:
Gimbal Roll: вихід керує поворотом gimbal.Gimbal pitch: вихід контролює крок підвісу.Gimbal Yaw: Output controls Gimbal yaw.
Наприклад, у вас можуть бути наступні налаштування для призначення кочення, тангажу та рида гімбала на виведення AUX1-3.
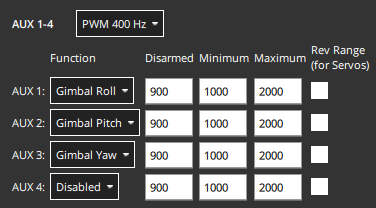
PWM значення для використання при відблокованому, максимальному та мінімальному значеннях можна визначити так само, як і для інших сервоприводів, використовуючи повзунки тесту приводу, щоб підтвердити, що кожний повзунок переміщує відповідну вісь, і змінюючи значення так, щоб гімбал знаходився у відповідному положенні при відблокованому стані, низькому і високому положенні повзунка. Значення також можуть бути наведені у документації гімбала.
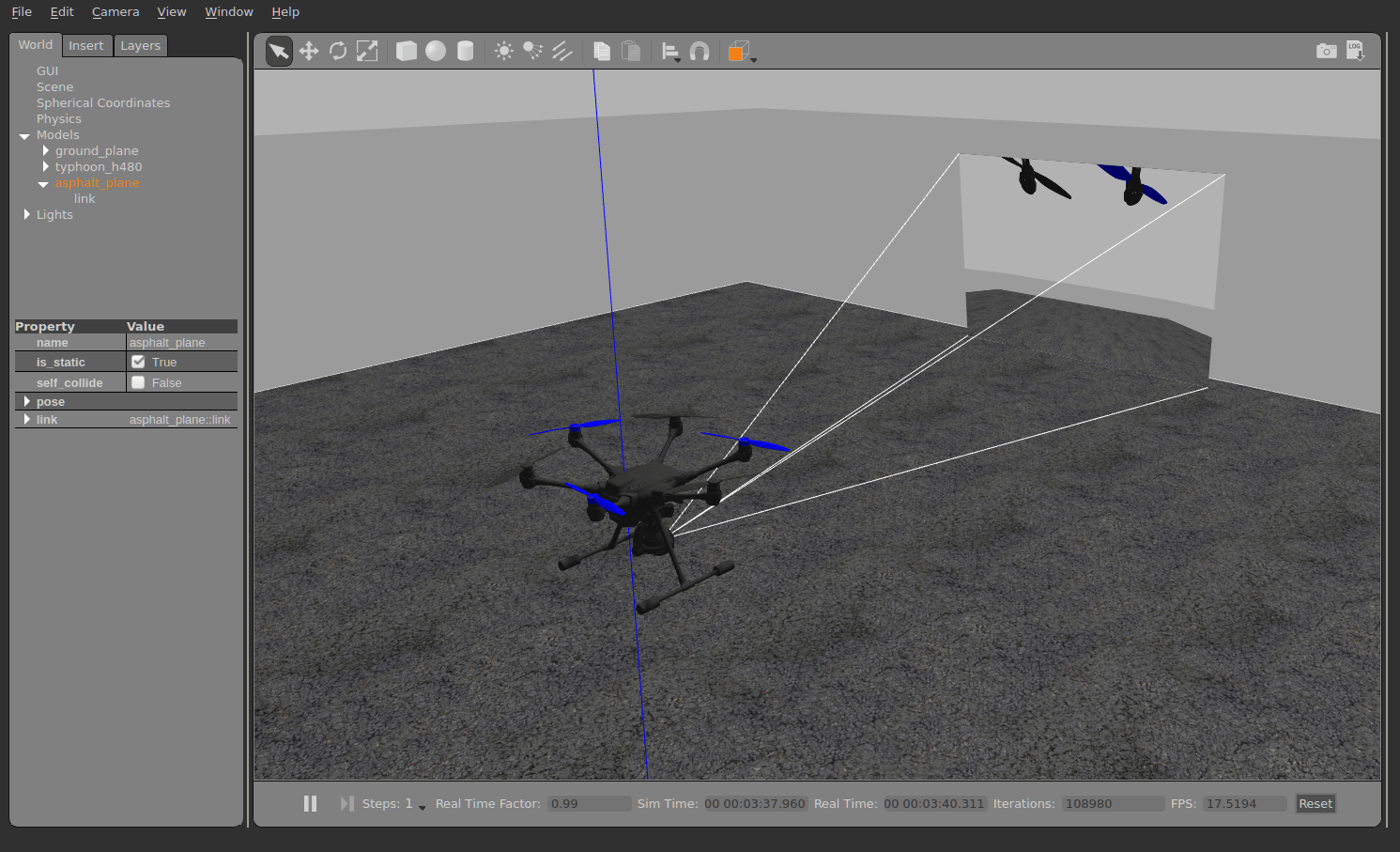
SITL
Симуляція Gazebo Classic моделі Typhoon H480 поставляється з передконфігурованим симульованим гімбалем.
Щоб запустити, використовуйте:
sh
make px4_sitl gazebo-classic_typhoon_h480Щоб просто перевірити роботу драйвера гімбала на інших моделях або симуляторах, переконайтеся, що драйвер працює (за допомогою gimbal start), а потім налаштуйте його параметри.
Тестування
Водій забезпечує просту тестову команду. Наступне описує тестування в SITL, але команди також працюють на реальних пристроях.
Почніть симуляцію з (для цього не потрібно змінювати параметри):
sh
make px4_sitl gazebo-classic_typhoon_h480Переконайтеся, що він зброєний, наприклад, за допомогою команди commander takeoff, а потім використовуйте наступну команду для керування гімбалем (наприклад):
sh
gimbal test yaw 30Зверніть увагу, що симульований гімбал стабілізується самостійно, тому якщо ви надсилаєте команди MAVLink, встановіть прапори стабілізації на значення false.