Автопілот CUAV V5+
PX4 не виробляє цей (або будь-який) автопілот. Зверніться до виробника щодо питань технічної підтримки або відповідності вимогам.
V5+® - вдосконалений автопілот виробництва CUAV®. Він був розроблений CUAV® у співпраці з командою PX4.
Автопілот рекомендується для комерційної системної інтеграції, але також підходить для академічних досліджень і будь-якого іншого використання.
Деякі з його основних функцій включають:
- Повна сумісність зі стандартом проєкту Pixhawk FMUv5 і використовує Pixhawk Connector Standard для всіх зовнішніх інтерфейсів.
- Більш продуктивний процесор, оперативна пам'ять та флеш-пам'ять, ніж у FMU v3, разом із більш стабільними та надійними датчиками.
- Прошивка сумісна з PX4.
- Модульна конструкція дозволяє користувачам налаштовувати власну носійну плату.
- Вбудована система поглинання вібрації з високоефективною системою поглинання ударів.
- Множинні резервні датчики та системи живлення для покращення безпеки та стабільності польоту.
Цей контролер польоту підтримується виробником.
Короткий опис
Головний FMU процесор: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB пам'ять, 512KB RAM
IO процесор: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
Сенсори на платі:
- Акселерометр/Гіроскоп: ICM-20689
- Акселерометр/Гіроскоп: BMI055
- Магнітометр: IST8310
- Барометр: MS5611
Інтерфейси:
- 8-14 PWM виходів (6 з IO, 8 з FMU)
- 3 виділених PWM/Capture входи на FMU
- Виділений R/C вхід для CPPM
- Виділений R/C вхід для Spektrum / DSM та S.Bus з аналоговим / PWM RSSI входом
- аналоговий / PWM вхід RSSI
- Вихід сервоприводу S.Bus
- 5 загальних послідовних портів
- 4x I2C порти
- 4 шини SPI
- 2 CANBuses з послідовними ESC
- Аналогові входи для напруги / струму з 2 батарей
Система живлення:
- Живлення: 4.3~5.4В
- Вхід USB: 4.75~5.25В
Вага та розміри:
- Вага: 90г
- Розміри: 85.5*42*мм
Інші характеристики:
- Робоча температура: -20 ~ 80°c (виміряне значення)
Де купитиCUAV Aliexpress (міжнародні користувачі)
CUAV Taobao (користувачі з материкового Китаю)
INFO
Автопілот можна придбати з модулем Neo GPS в комплекті
З'єднання (Проводка)
Схема розташування виводів
Завантажте схему розводки V5+ звідси.
Номінальна напруга
Автопілот V5+ підтримує резервні джерела живлення - можна використовувати до трьох джерел: Power1, Power2 та USB. Ви повинні подати живлення принаймні до одного з цих джерел, інакше контролер польоту буде знеструмлений.
У FMUv5 з модулем PX4IO (як у випадку з V5+) шина живлення сервоприводу контролюється тільки FMU. Вона не живиться від FMU і не забезпечує його живленням. Однак, контакти, позначені +, є загальними, і до будь-якого з наборів контактів серводвигуна може бути підключений BEC для живлення рейки живлення серводвигуна.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- Входи
Power1таPower2(4,3 - 5,4 В) USBвхід (4.75В до 5.25В)
Захист від перенапруги
V5+ має захист від перенапруги на периферійних пристроях з напругою 5 Вольт і 5 Вольт високої потужності, який обмежує струм до 2,5 А. V5+ має захист від короткого замикання.
WARNING
На роз'єми, позначені як контакт 1, можна подавати до 2,5 А (хоча вони розраховані лише на 1 А).
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана і автоматично встановлюється за допомогою QGroundControl при підключенні відповідного обладнання.
Щоб зібрати PX4 для цього контролера:
make px4_fmu-v5_defaultВідладочний порт
Системна консоль PX4 та інтерфейс SWD працюють через порт FMU Debug (DSU7). Плата не має інтерфейсу відладки вводу/виводу.
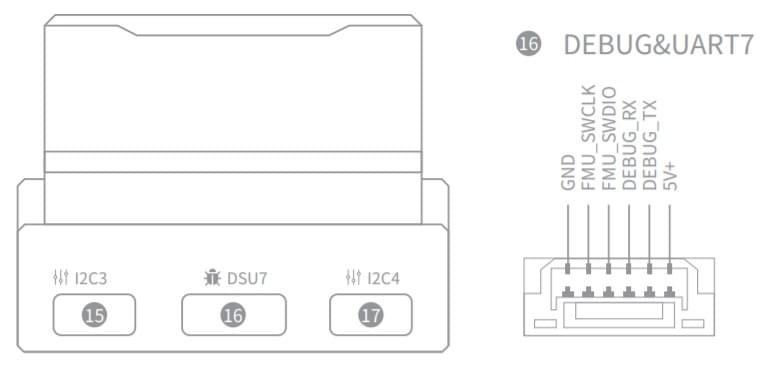
Відладочний порт (DSU7) використовує роз'єм JST BM06B і має наступну розводку:
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | 5V+ | +5В |
| 2 (blk) | DEBUG TX (OUT) | +3.3В |
| 3 (blk) | DEBUG RX (IN) | +3.3В |
| 4 (blk) | FMU_SWDIO | +3.3В |
| 5 (blk) | FMU_SWCLK | +3.3В |
| 6 (blk) | GND | GND |
До комплекту поставки входить зручний відладочний кабель, який можна під'єднати до порту DSU7. Він розділяє кабель FTDI для підключення PX4 System Console до USB-порту комп'ютера і виводи SWD, які використовуються для налагодження SWD/JTAG. Відладочний кабель, що входить до комплекту, не підключається до контакту (1) порту SWD Vref.
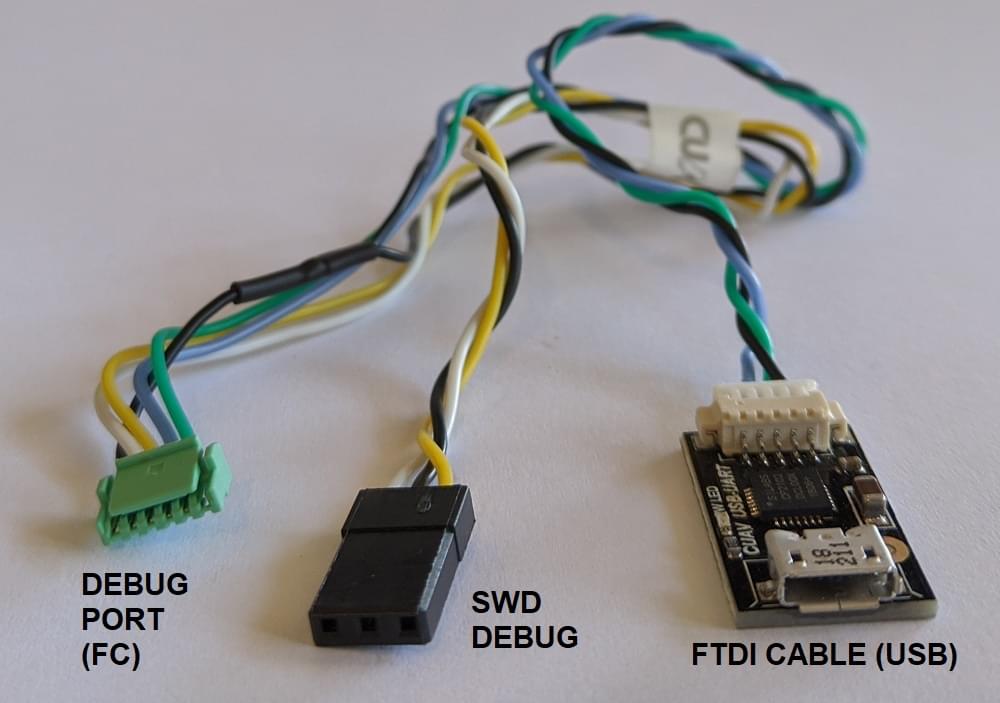
WARNING
Вивід Vref SWD (1) використовує 5В як Vref, але процесор працює при напрузі 3,3В!
Деякі JTAG-адаптери (SEGGER J-Link) використовують напругу Vref для встановлення напруги на лініях SWD. Для прямого підключення до Segger Jlink ми рекомендуємо використовувати 3,3 вольта з контакту 4 роз'єму з позначкою DSM/SBUS/RSSI для забезпечення Vtref на JTAG (тобто для забезпечення 3,3 В і NOT 5 В).
За додатковою інформацією звертайтесь до розділу Використання JTAG для апаратної налагодження.
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | TX - RC-вхід з роз'єму SBUS_RC |
| UART7 | /dev/ttyS5 | Debug Console |
| UART8 | /dev/ttyS6 | PX4IO |
Периферія
Підтримувані платформи / Airframes
Будь-який мультикоптер / літак / наземна платформа чи човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. Повний перелік підтримуваних конфігурацій можна переглянути в розділі Довідник планерів.
Примітки
Не підключайте цифровий або аналоговий PM до роз'ємів, сконфігурованих для іншого типу PM
Якщо ви під'єднаєте аналоговий PM до цифрового роз'єму PM, він зупинить всі пристрої I2C на цій шині. Зокрема, це призведе до зупинки компаса GPS через конфлікт, а також може пошкодити FMU (у довгостроковій перспективі).
Аналогічно, цифровий PM, підключений до аналогового роз'єму, не працюватиме, а також може пошкодити/вивести з ладу модуль живлення (у довгостроковій перспективі).
Сумісність
CUAV використовує деякі відмінні дизайни і несумісний з деяким обладнанням, про що буде описано нижче.
GPS несумісний з іншими пристроями
Neo v2.0 GPS, рекомендований для використання з CUAV V5+ і CUAV V5 nano, не повністю сумісний з іншими контролерами польоту Pixhawk (зокрема, не сумісна частина сигнального зумера і можуть виникнути проблеми з перемикачем безпеки).
Пристрій прийому GNSS UAVCAN NEO V2 PRO також може бути використаний і сумісний з іншими контролерами польоту.
Використання JTAG для апаратного налагодження
DSU7 Штифт налагодження FMU 1 має напругу 5 вольтів - не 3,3 вольта від ЦП.
Деякі JTAG використовують цю напругу для встановлення рівнів вводу-виводу під час обміну даними з ціллю.
Для прямого підключення до Segger Jlink ми рекомендуємо використовувати 3,3 вольти з DSM/SBUS/RSSI пін 4 як Пін 1 на роз'ємі для налагодження (Vtref).
Відомі проблеми
Проблеми нижче посилаються на номер партії, в якій вони вперше з'являються. Номер партії - це чотирицифрова дата виробництва за V01 та відображається на наклейці з боку контролера польоту. Наприклад, серійний номер партії V011904 ((V01 - це номер V5, 1904 - це дата виробництва, тобто номер партії).
Інтерфейс SBUS / DSM / RSSI Pin1 не захищений від перевантаження
WARNING
Це питання безпеки.
Будь ласка, не підключайте інше обладнання (крім RC приймача) до інтерфейсу SBUS / DSM / RSSI - це може призвести до пошкодження обладнання.
- Знайдено: Партії V01190904xxxx
- Виправлено: Партії пізніше, ніж V01190904xxxx